




ついに「触覚を獲得したロボットハンド」が登場、人間より正確なセンサーで重いものからポテチまでソフトに取り扱うことが可能に
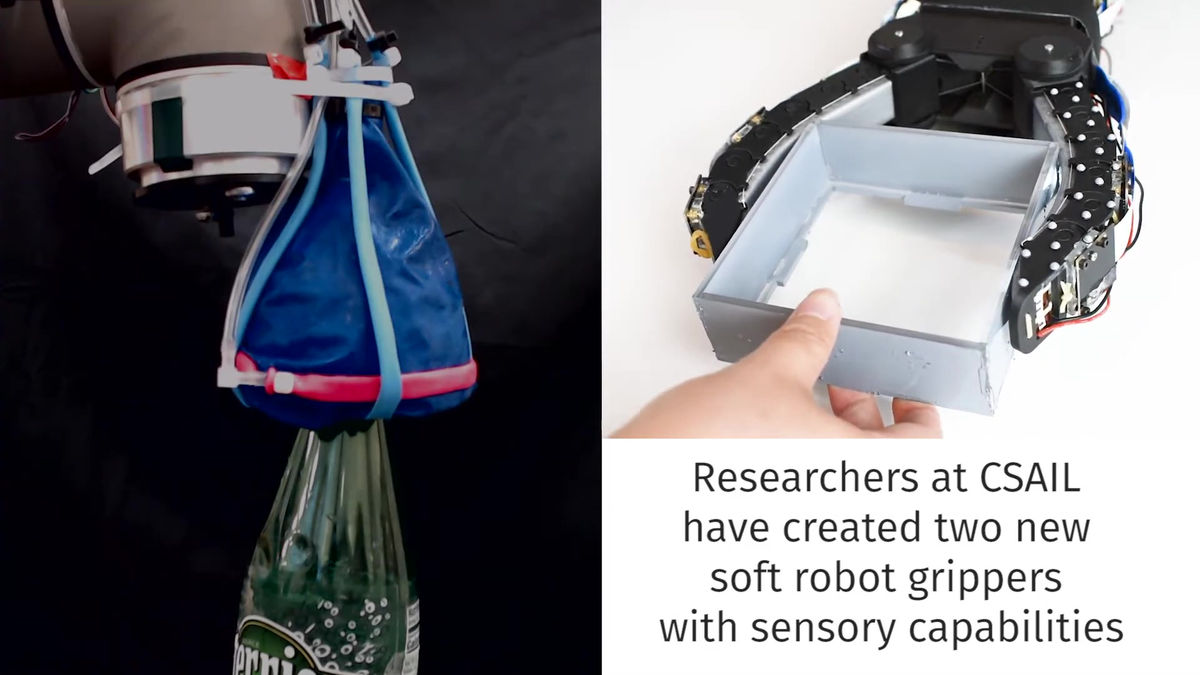
マサチューセッツ工科大学(MIT)のコンピュータ科学・人工知能研究所(CSAIL)が、触覚センサーにより触れているものが何かを感知し、圧力を調節できるロボットハンドを2種類開発しました。これにより、柔軟な素材を用いた新しいロボット工学の分野である「ソフトロボット」がさらなる発展を遂げると期待されています。
Giving soft robots feeling | MIT News
http://news.mit.edu/2020/giving-soft-robots-senses-0601
MIT builds robot hand that can ‘see and feel’ objects as fragile as a crisp in major breakthrough | The Independent
https://www.independent.co.uk/life-style/gadgets-and-tech/news/robots-soft-robotics-hand-mit-csail-a9538301.html
今回発表されたロボットハンドがどんな動きをするかは、以下のムービーを再生すると一発で分かります。
Giving Soft Robots Senses - YouTube
MITは、触覚センサーにより柔軟な作業が可能なロボットハンドを2種類開発しました。
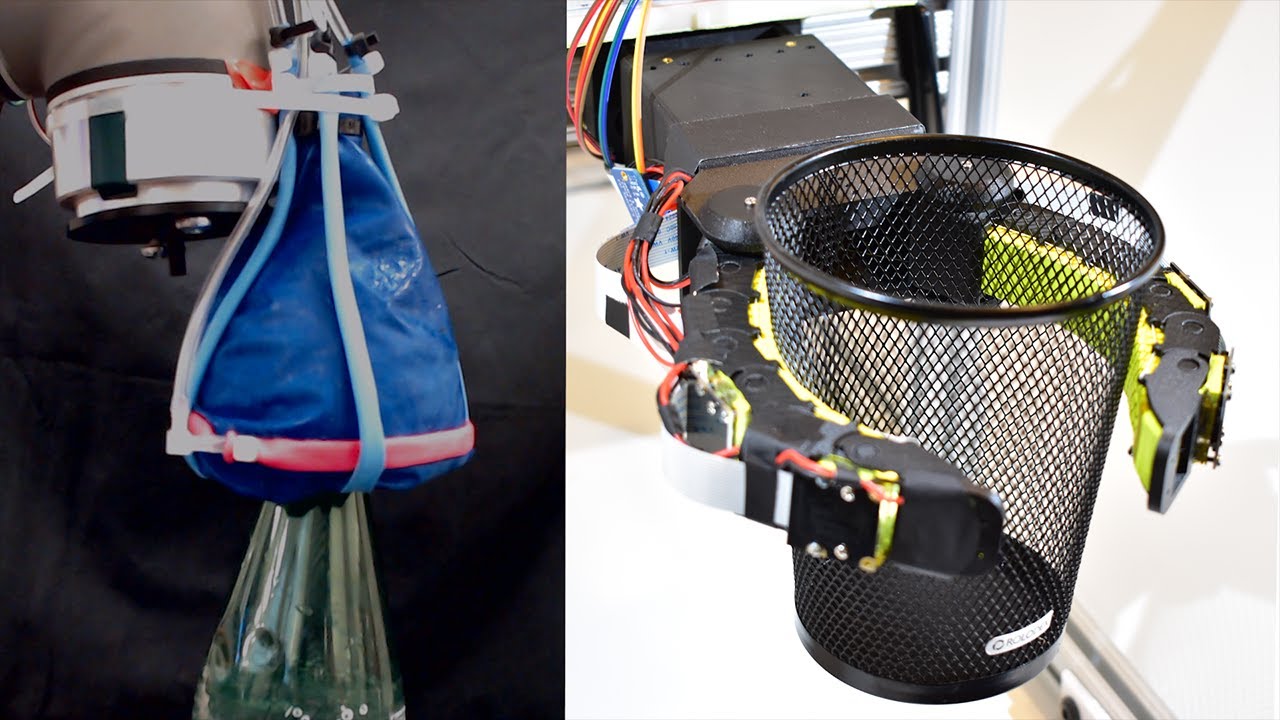
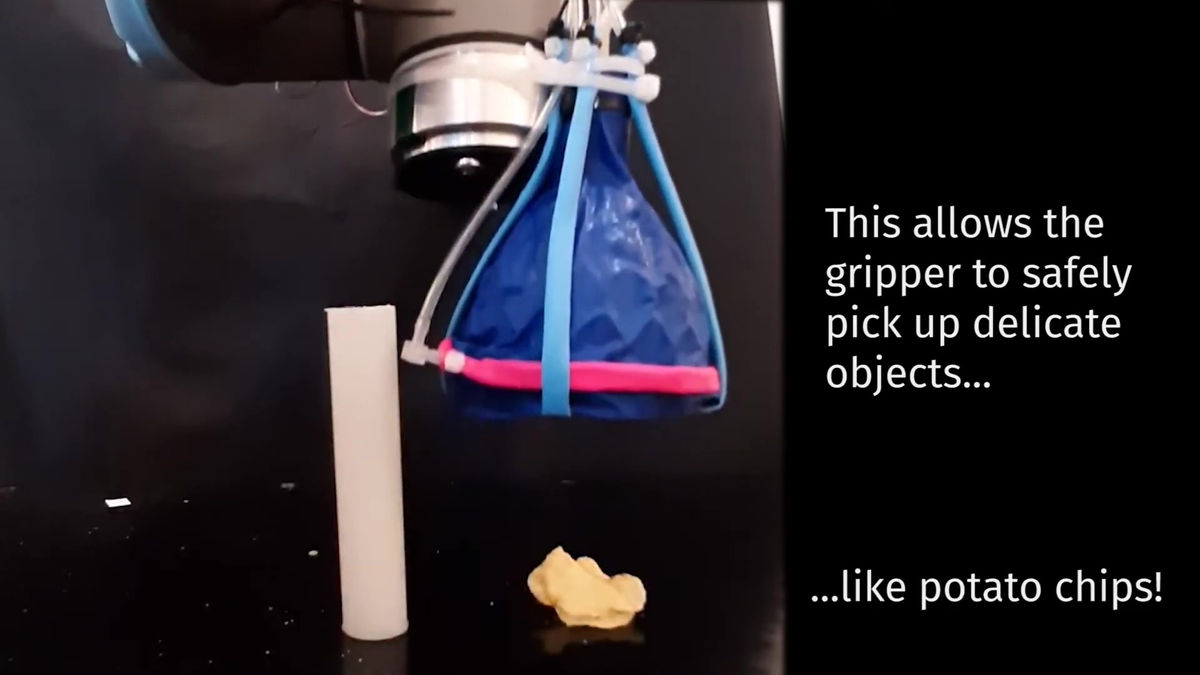
1つ目はハンドの底辺が伸縮する三角すいの形状をした「Magic ball gripper」です。

このロボットハンドは、物体にバルーンをかぶせてから、バルーンをぎゅっと収縮させて物体を保持します。

ロボットハンドには力やひずみを感知するセンサーが搭載されており、このセンサーからフィードバックを得て力を調節することで、重い瓶や……
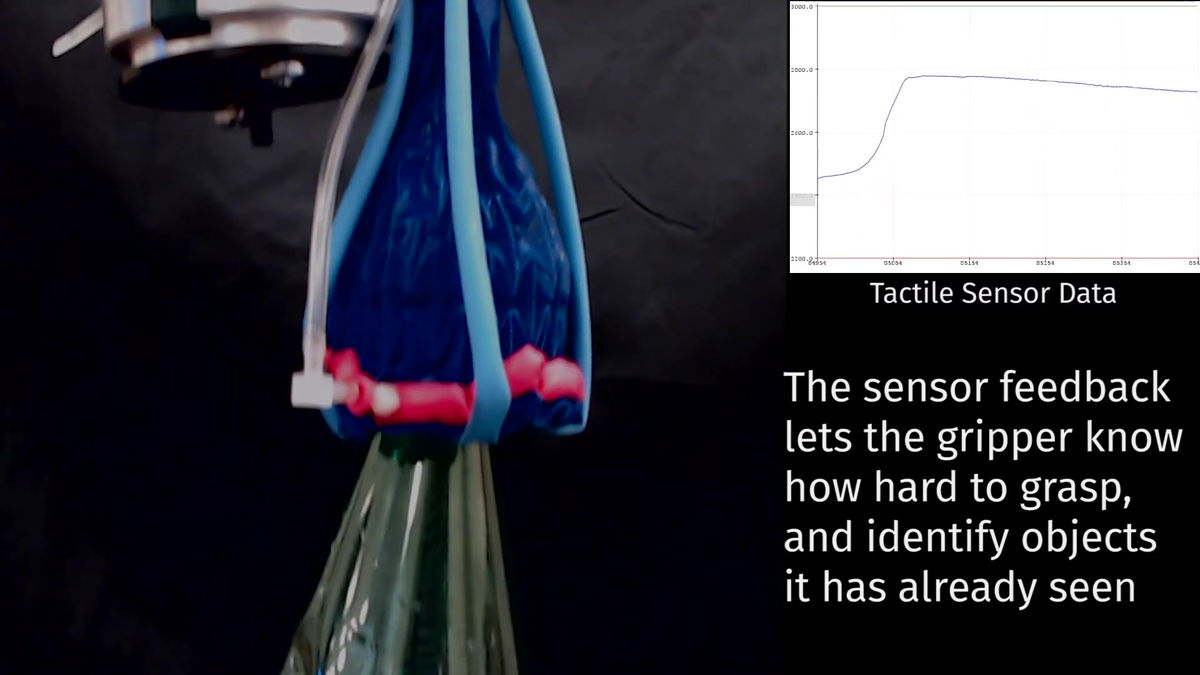
壊れやすいポテトチップスまでさまざまなものを運ぶことが可能。CSAILの開発チームは今後、このセンサーを用いて応用性や感度に優れた「センシングスキン」を開発する考えとのことです。
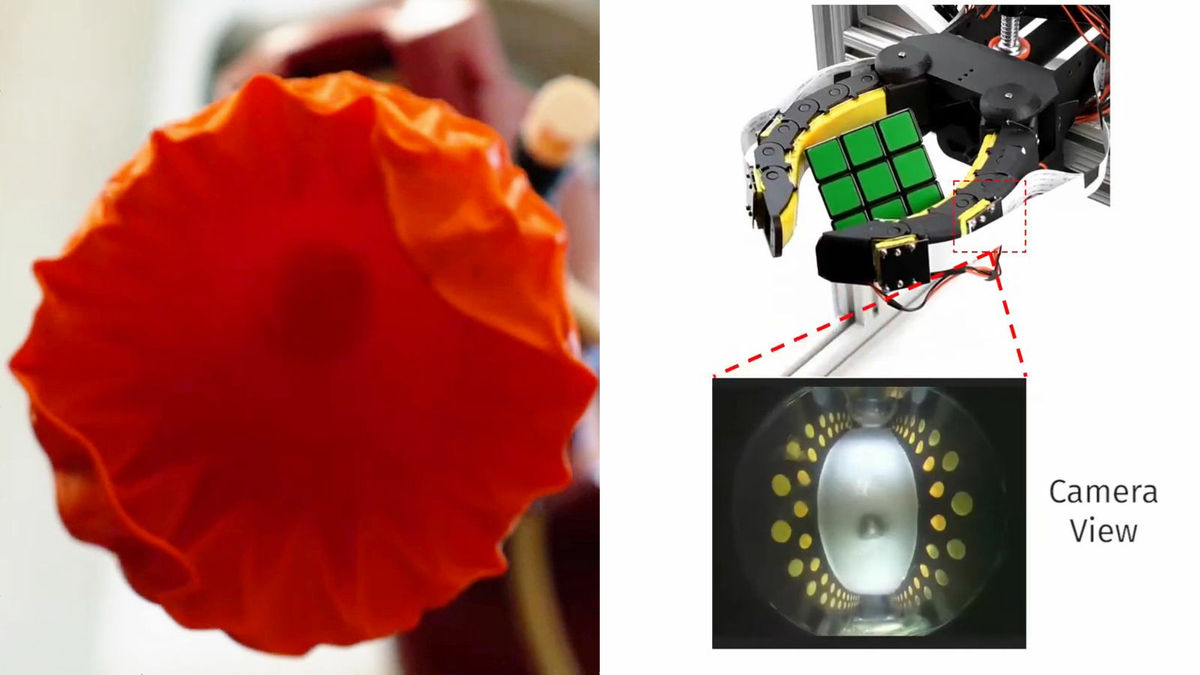
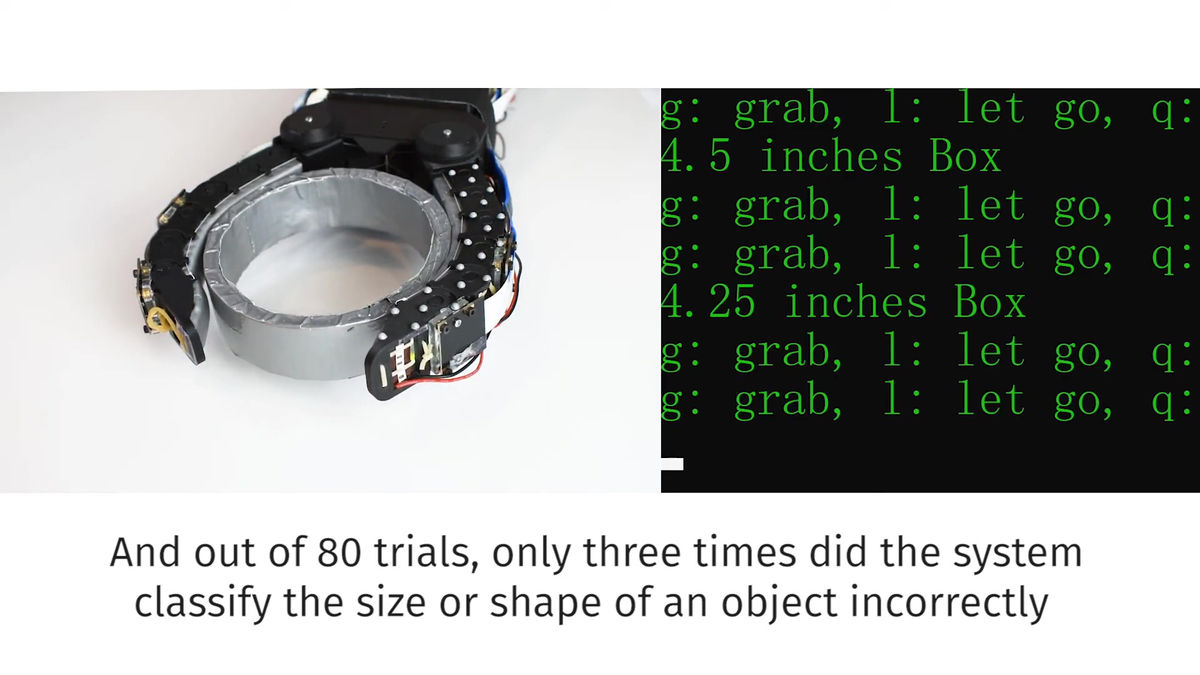
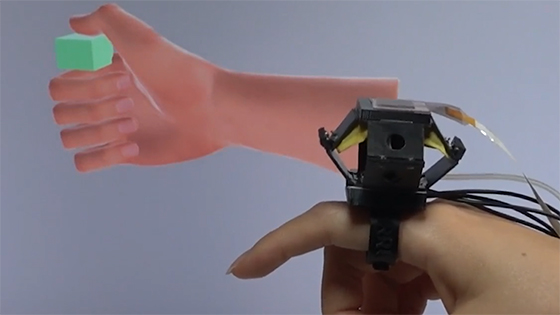
そして、2つ目はカメラによりアームの状態を捉えて対象物の固さを認識する「GelFlex」です。
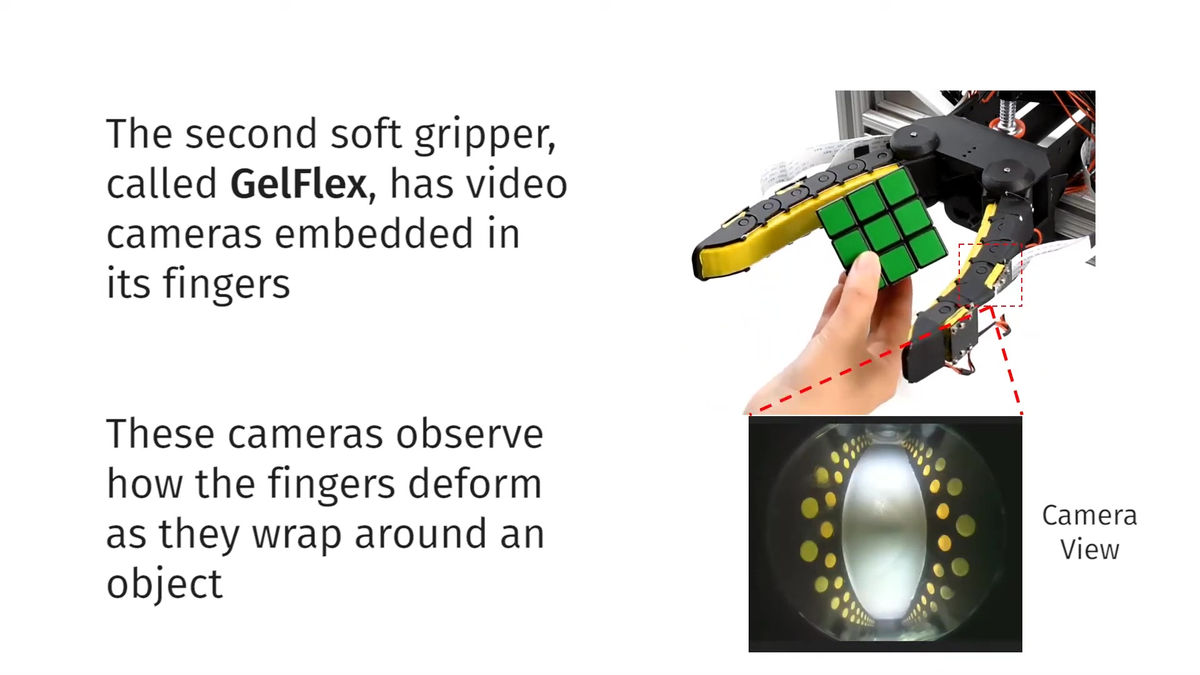
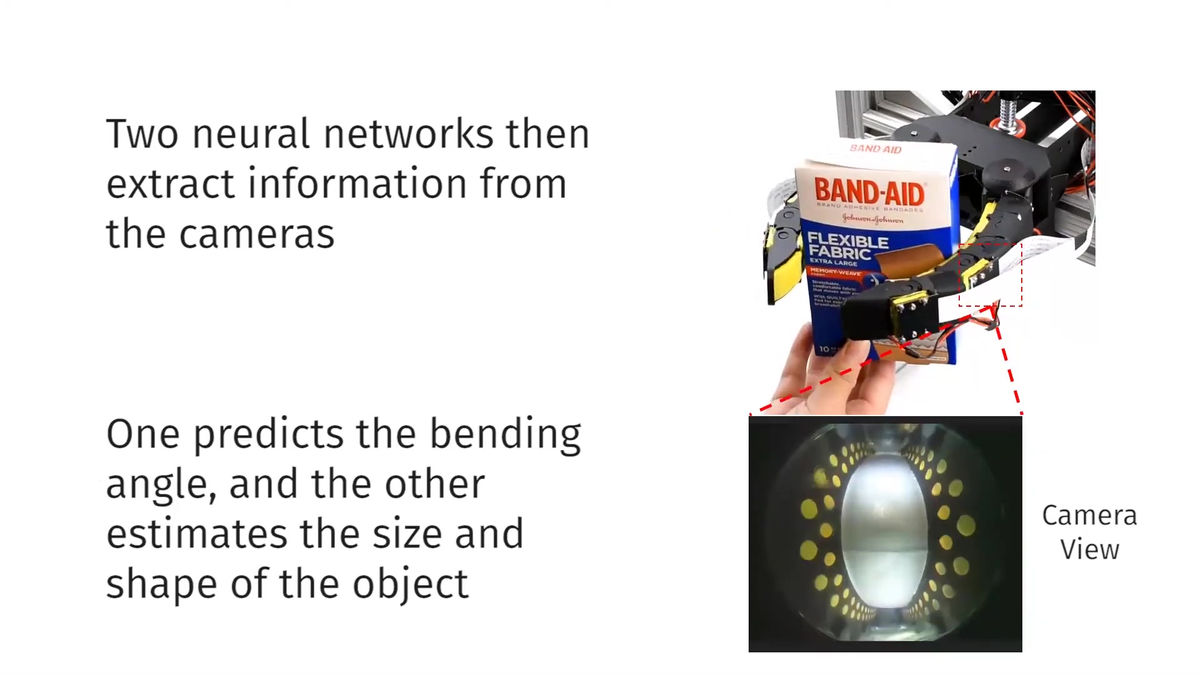
アームに装着されたカメラの映像から、「アームの曲がり具合」と「対象物のサイズと形状」を推測することで、壊れやすいものでもしっかり保持することができます。
指の曲がり具合を測定するセンサーは非常に精密で、誤差は平均して0.77ミリ未満。人間の指よりも正確だったとのこと。
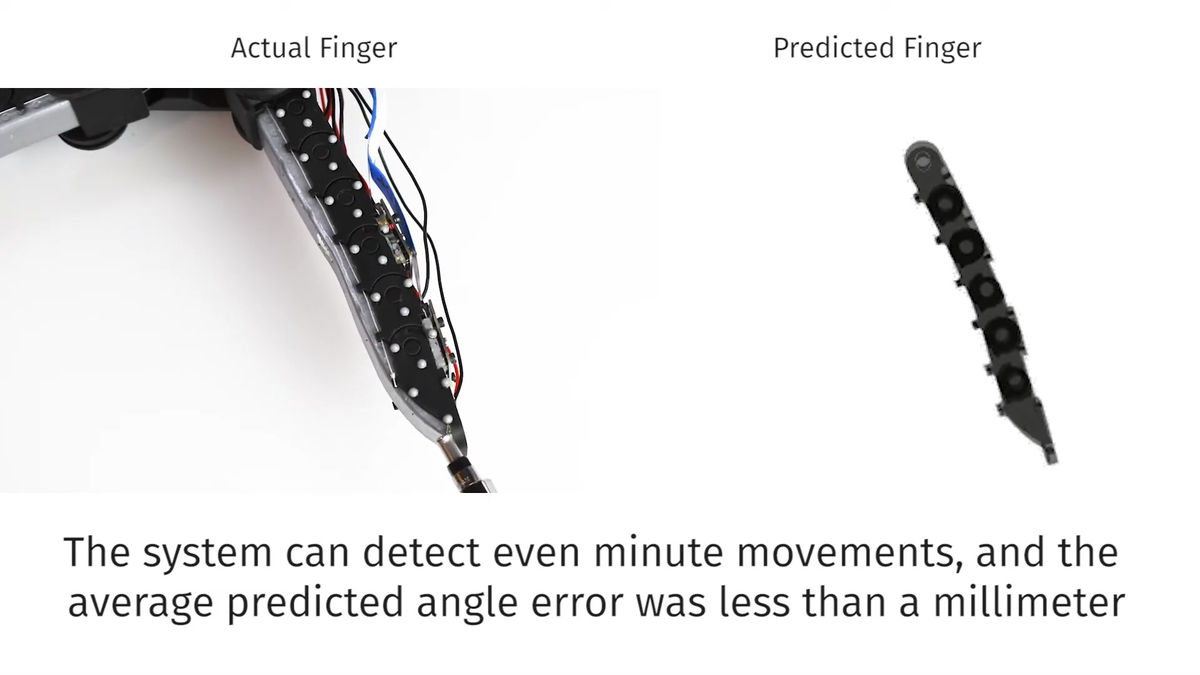
80回のテストのうち、物体の形状を誤って認識したのは3回しかありませんでした。開発チームは今後、指の数や構造などがさらに複雑化しても対応できるセンサーを開発する予定です。
MITのロボット工学教授でCSAILの責任者でもあるDaniela Rus氏は、イギリスのオンライン新聞The Independentの取材に対し「世界を感じることで、世界を『見る』ことができるロボットを開発したいと思います」と語りました。
・関連記事
まるで人間のように汗をかくロボットが開発される、人間の3倍もの冷却効率を達成 - GIGAZINE
大人に踏まれても壊れないゴキブリのような耐久力を持つ超薄型ロボットが開発される - GIGAZINE
ロボット工学の専門家が「エロボット」の未来について真剣に研究中 - GIGAZINE
ハーバード大が「柔らかいロボット」の作り方を完全指南するオープンソースサイト「soft robotics toolkit」を開設 - GIGAZINE
培養した筋肉を搭載したハイブリッドロボットが開発される - GIGAZINE
自分でトランスフォーム可能なサイコロ型ロボット「M-Blocks」が開発される - GIGAZINE
・関連コンテンツ




in 動画, ハードウェア, Posted by darkhorse_log
You can read the machine translated English article Finally, a ``robot hand that has gained ….