Finally, a ``robot hand that has gained a sense of touch'' has appeared, and it is possible to handle softly from heavy objects to potatoes with a sensor more accurate than humans
The Computer Science and Artificial Intelligence Laboratory (CSAIL) at the Massachusetts Institute of Technology (MIT) has developed two types of robot hands that can sense what is touching with a tactile sensor and adjust the pressure. As a result, it is expected that “soft robot”, a new field of robotics using flexible materials, will further develop.
Giving soft robots feeling | MIT News
MIT builds robot hand that can'see and feel' objects as fragile as a crisp in major breakthrough | The Independent
https://www.independent.co.uk/life-style/gadgets-and-tech/news/robots-soft-robotics-hand-mit-csail-a9538301.html
You can see how the robot hand announced this time moves in one shot by playing the following movie.
Giving Soft Robots Senses-YouTube
MIT has developed two types of robot hands that allow flexible work with tactile sensors.
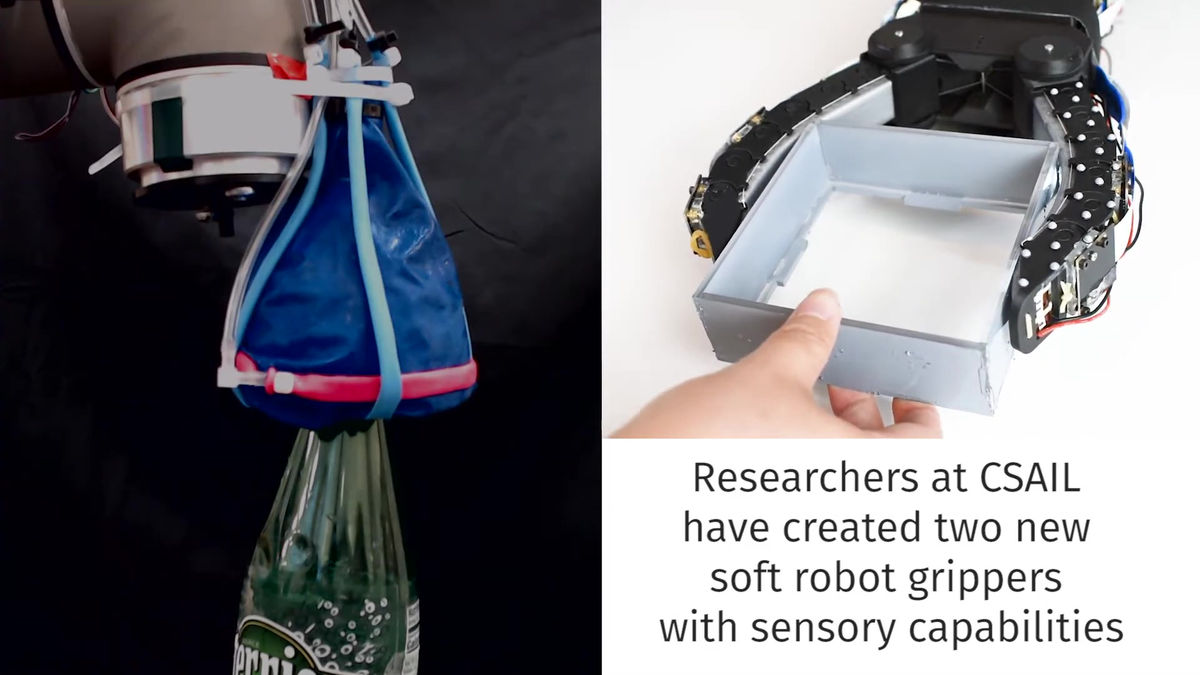
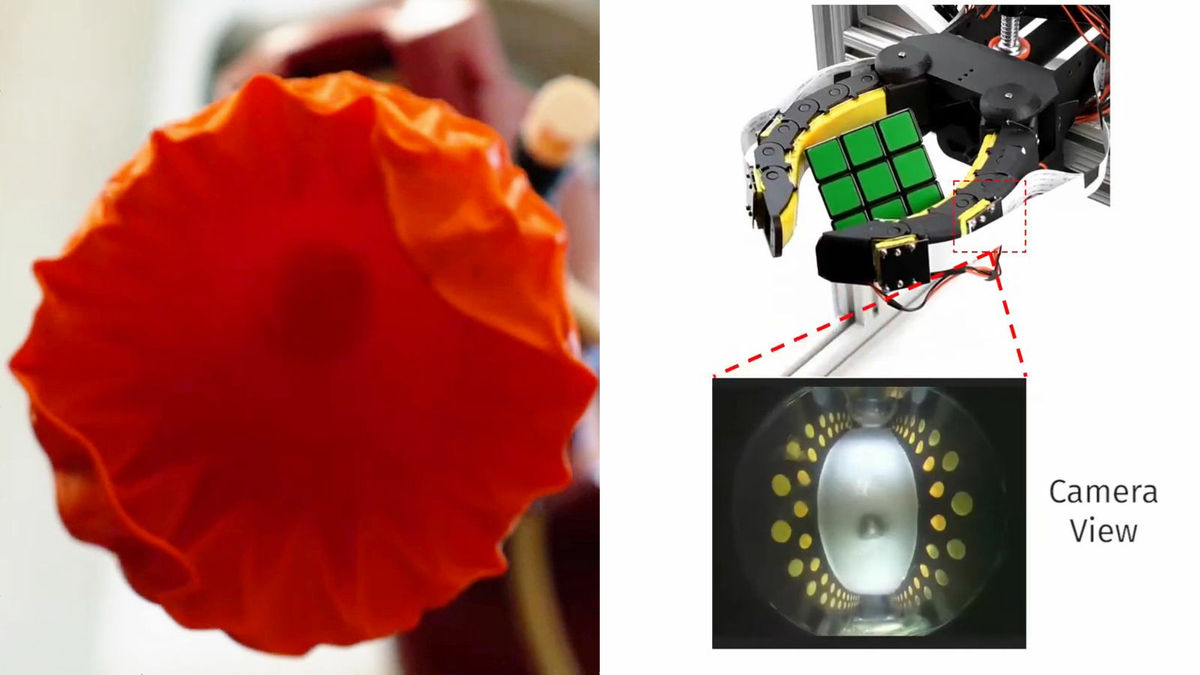
The first is the 'Magic ball gripper', which has the shape of a triangular cone where the base of the hand expands and contracts.

This robot hand covers an object with a balloon and then deflates the balloon to hold the object.

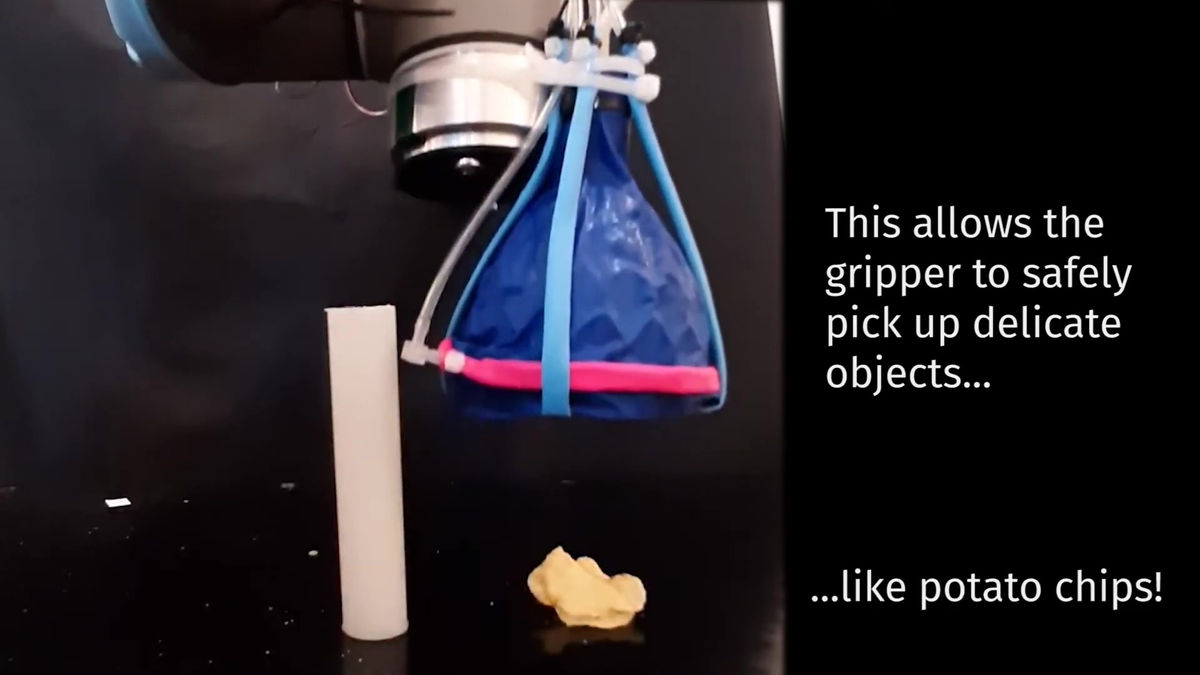
The robot hand is equipped with a sensor that detects force and strain. By obtaining feedback from this sensor and adjusting the force, a heavy bottle or...
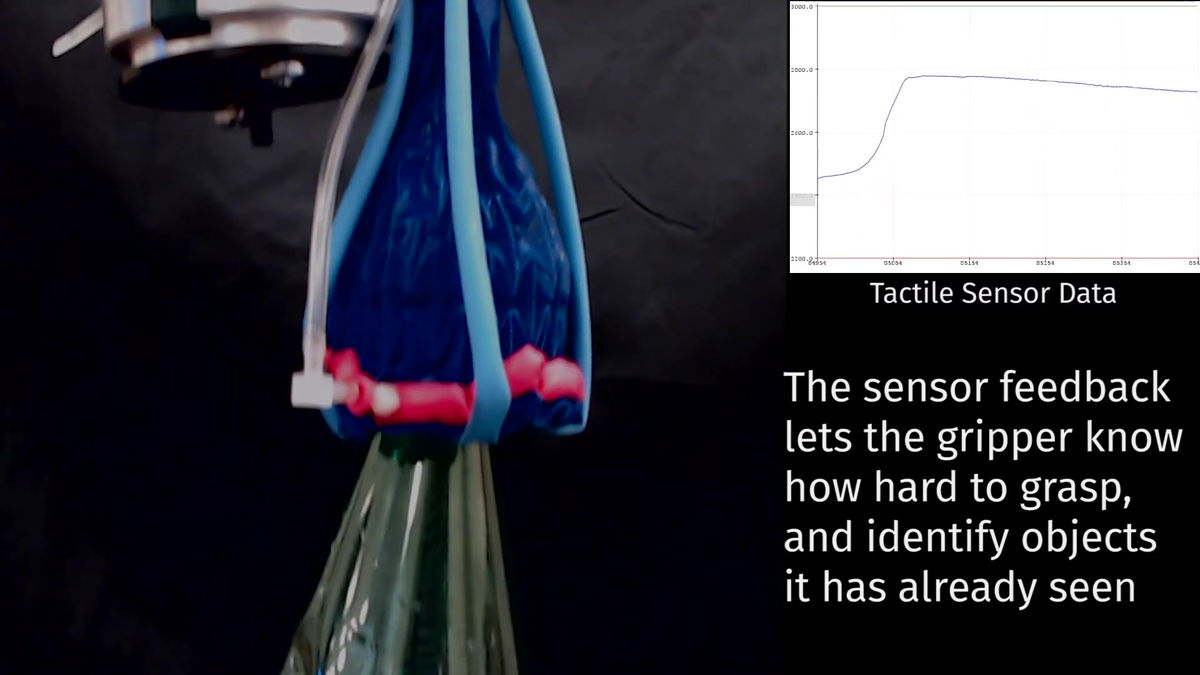
It is possible to carry various items such as fragile potato chips. CSAIL's development team intends to develop a 'sensing skin' with excellent applicability and sensitivity using this sensor in the future.
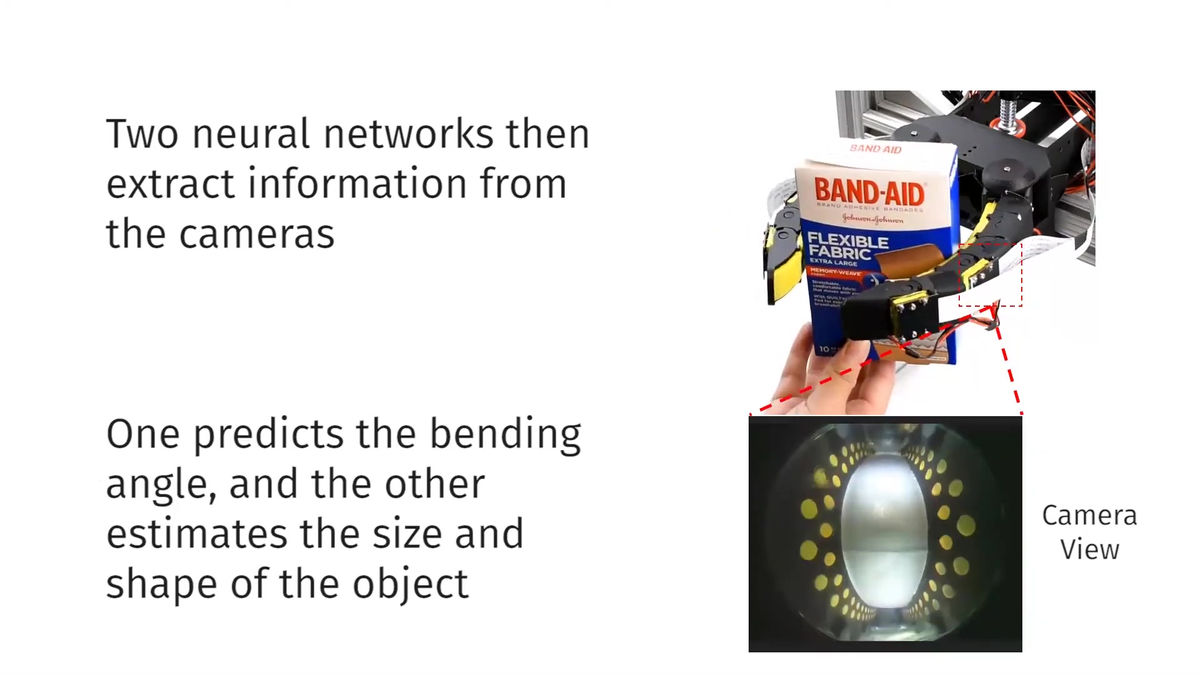
The second is 'GelFlex' that recognizes the hardness of the target object by capturing the state of the arm with a camera.
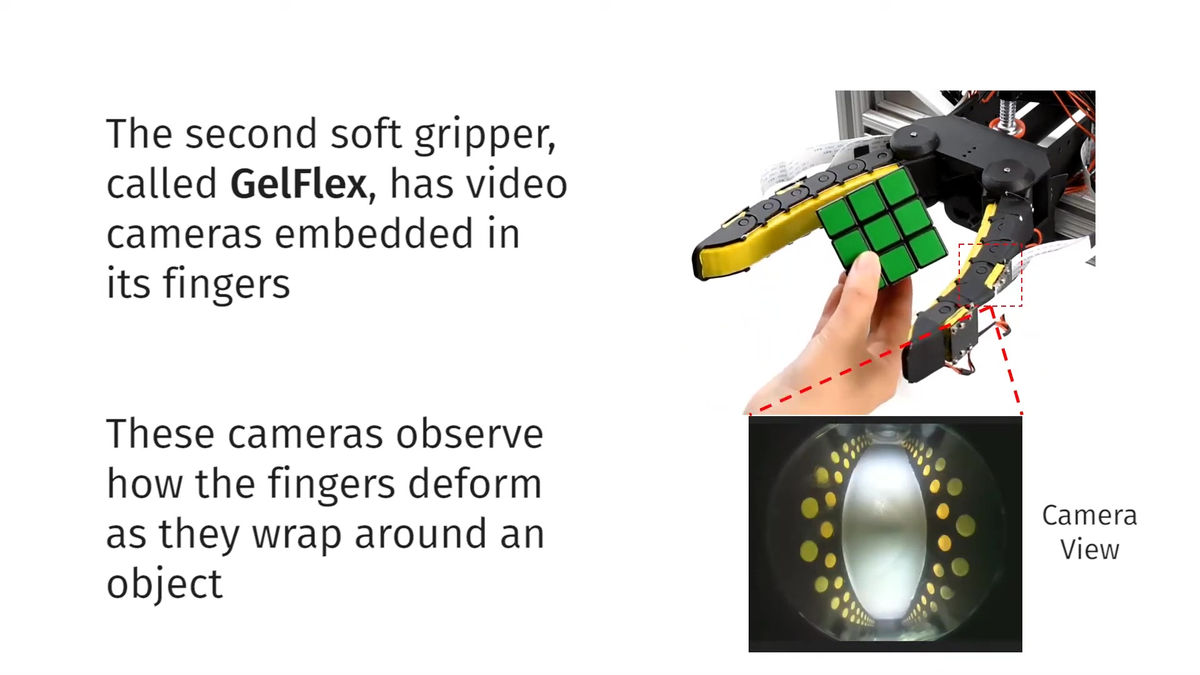
By estimating the 'bending condition of the arm' and the 'size and shape of the object' from the image of the camera attached to the arm, you can firmly hold even fragile objects.
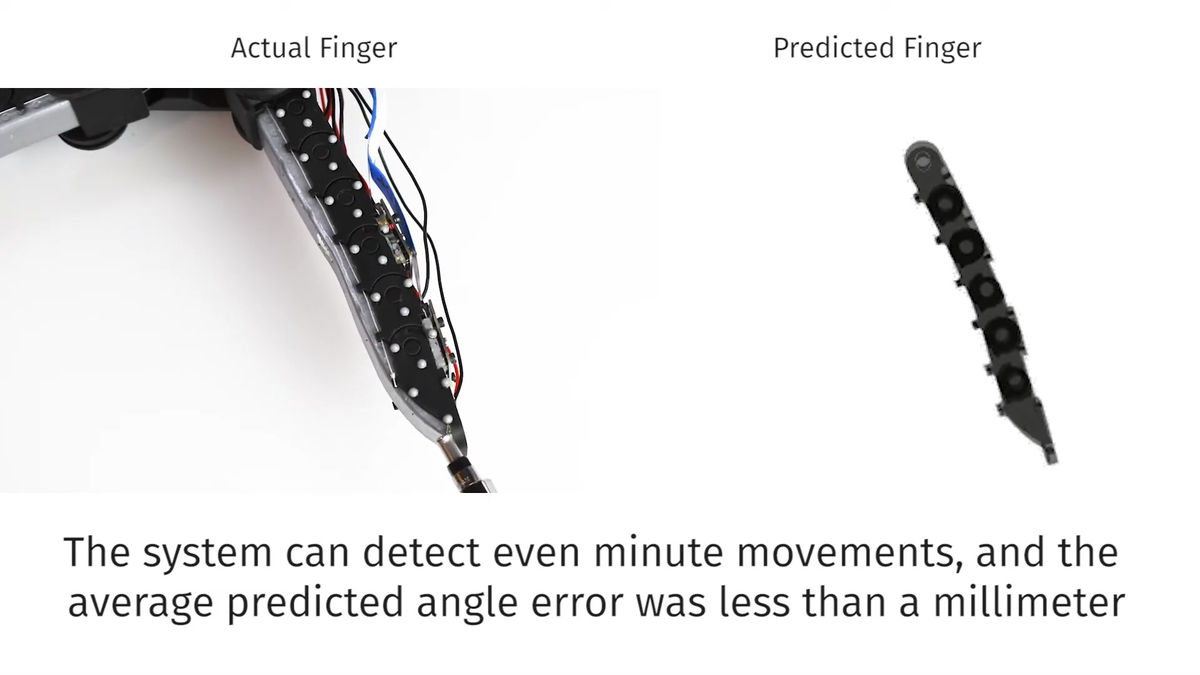
The sensor that measures the degree of bending of the finger is very precise, and the error is less than 0.77 mm on average. It was more accurate than a human finger.
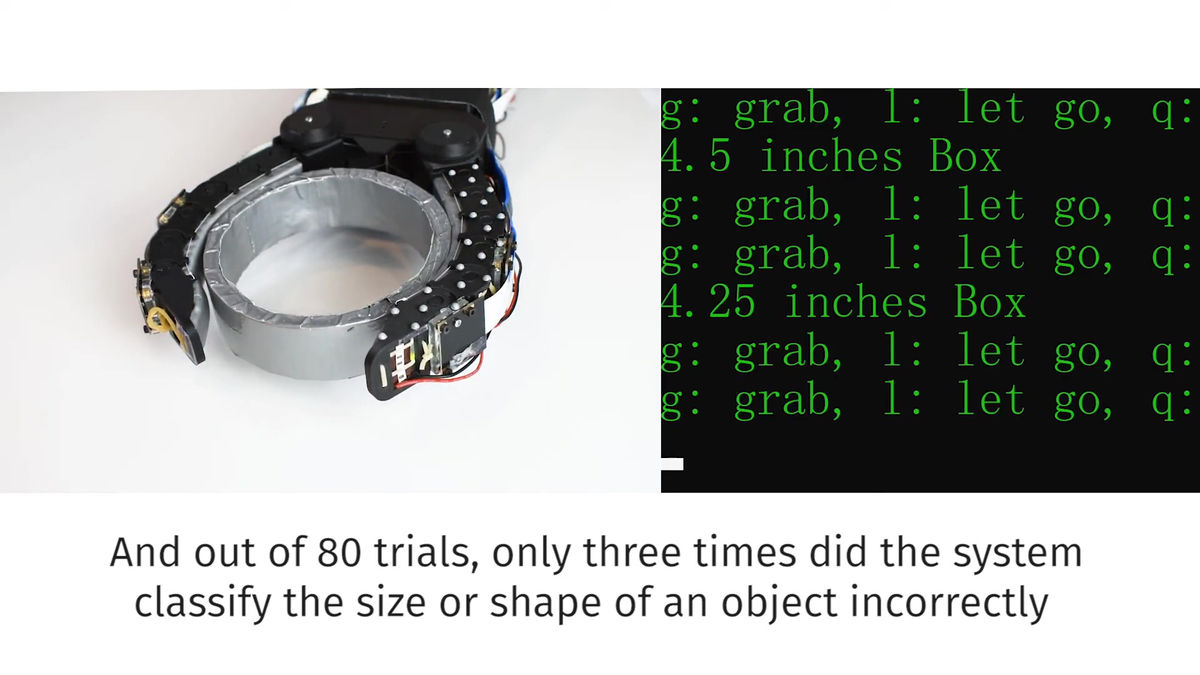
Out of the 80 tests, only 3 were erroneously recognizing the shape of the object. In the future, the development team plans to develop a sensor that can handle even more complicated finger numbers and structures.
Daniella Rus, a MIT professor of robotics and head of CSAIL, told an interview with The Independent, an online newspaper in the UK, 'I want to develop a robot that can 'see' the world by feeling the world.' I said.
Related Posts: