




搭乗可能な巨大クモ型ロボットを作るプロジェクト

これまでアイアンマンのリパルサーやマイティ・ソーのハンマー、世界初のプラズマが光の刃となるライトセイバーなど、すさまじいガジェット開発の模様を公開してきたYouTubeチャンネルのHacksmith Industriesが、6本の脚を持ち人間が乗り込むことも可能なクモ型ロボットを完成させるまでの一部始終を公開しています。
Our BIGGEST project yet! (SPIDER MECH!) - YouTube

Giant ride-on spider robot - Raspberry Pi
https://www.raspberrypi.com/news/giant-ride-on-spider-robot/
クモ型ロボット「MEGAHEX」のプロジェクトは、「4本の脚を持つことでより柔軟な動きをするショベルカー」から着想してスタートしました。自在に向きを変えられるショベルカーを作るには、複数の脚を柔軟に動かすことでショベル部分を操作することが必要で、「それならば、ショベルで6本の脚を作ったロボットを作ればベストなのでは?」という発想のもと企画されています。
カナダの産業製品等の販売チェーンであるPrincess Autoとの提携もあり、6台のショベルカーと開発資金を得たHacksmithでしたが、当初の設計ではショベルアーム同士が近すぎて正確に動かすことができませんでした。そのため、ラフスケッチの長方形ボディから、六角形のボディで再デザインされました。

六角形のフレームが動作に耐えるのかというテストの中で、パーツを切断して何度も再溶接する必要がありました。ボディアームの設計は当初2日間を予定していましたが、結果として1週間以上かかったそうです。

ボディの完成後、脚となるショベルアームを取り付ける作業が行われました。Hacksmithは「最初の段階で問題を多く抱えていたため、続く作業でも悪夢が繰り返されると思っていました」と語っている一方で、脚の取り付けはスムーズに進行したとのこと。

見た目上は完成しても、溶接にヒビが入ったり、フレームがわずかにねじれたりといったトラブルにより、実際に動作させると崩れてしまう恐れがありました。しかし、4人が搭乗して実際に操作したところ、4人の搭乗者をなんなく持ち上げてアームを動かすことができました。ただ、4人がそれぞれのアームを分担して動かすという操作はあまりにも複雑で、コンピューターによる制御が必要という結論に至っています。

約1カ月後、MEGAHEXの安定性を高めるために、脚がショベルアームから平たいデザインに変更されました。

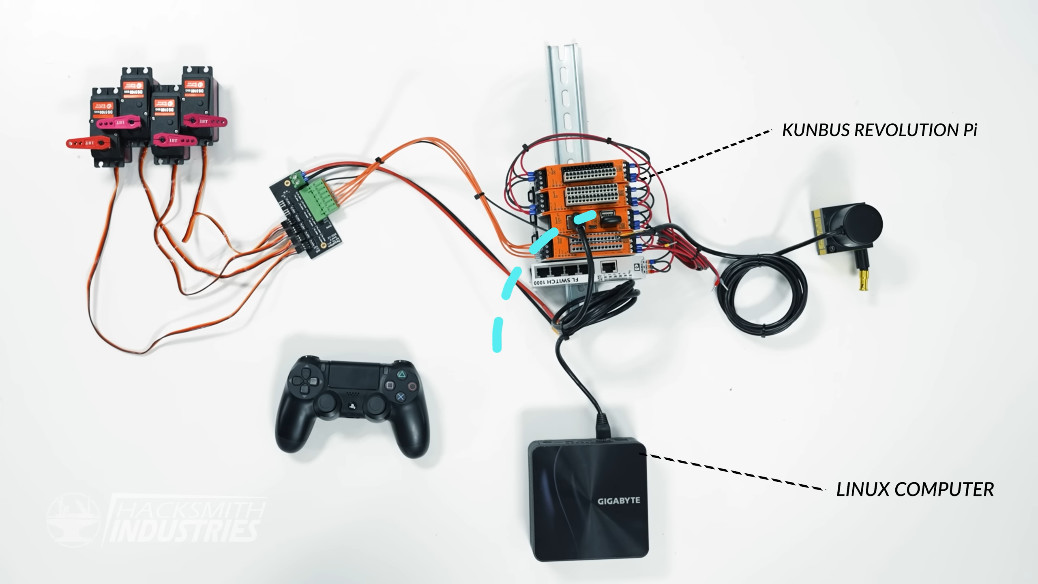
足元が安定したことでより複雑な動きも可能になったMEGAHEXを1人のパイロットで動かすために、Linuxコンピュータでユーザーの入力を制御し、産業用Raspberry PiであるKunbus Revolution Piにデータが送信され、個々の関節の位置を計算した結果に基づいた動作を行います。
コンピューターによる制御でどうやって正確にMEGAHEXを動かすのかといったプログラムは、シミュレーションを繰り返すことで設計されました。
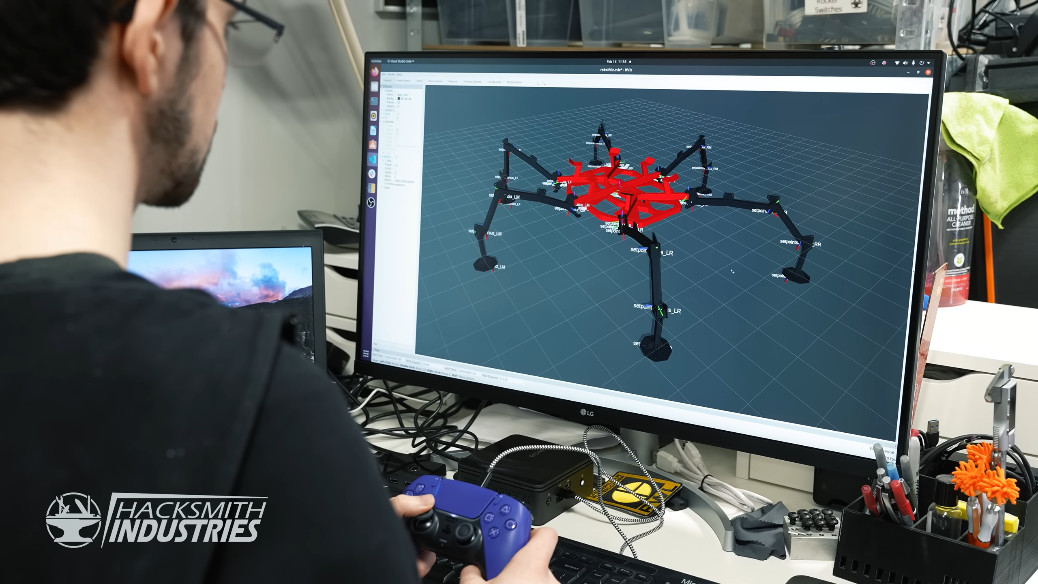
それからさらに1か月後、マシンとプログラムを統合し、実際にゲームのコントローラーでシミュレーションと同じようにMEGAHEXを動作する段階まで進行しました。ここでは、MEGAHEXはコマンド通りに「動作しようとした」動きは見せましたが、実際に搭乗者を持ち上げて動き出すところまではうまくいきませんでした。ここからパワーを上げるために脚を長くしたり、姿勢を制御するサーボ機構を見直したり、ファンを取り付けて発熱を軽減したりと、さまざまな試みが行われましたが、半年近く課題をクリアすることができず停滞してしまいました。

プロジェクトが開始して300日を迎えた頃、エンジン出力を大幅に上げてテストしたところ、MEGAHEXは小さく丸まるクモのような不安定さはあったものの、全てのアームを動かしてボディを持ち上げるところまでは成功しました。

テストのデータを総ざらいすることでプログラム面に問題を発見し、複数のコードを修正して再度アップロードした結果、MEGAHEXは想定していたように6本の脚で巨大なボディを持ち上げ、自在な方向に動くことができるようになりました。

この段階では、MEGAHEXをコントローラー1つで立ちあがらせ、前後左右に動かすことはできますが、脚に自重がかかるとよろめき、負担が大きくなりすぎると動きを止めてしまうほか、脚を踏み出すことはできますがその脚が巨大なボディを引き寄せるパワーは足りていませんでした。ただし、どこも破損することなく、熱を持って発火するようなトラブルも起きなかったため、最初のテストとしては上々の仕上がりだったとのこと。その後はスムーズに動かすためのテストが繰り返されましたが、脚を踏み出してはよろめいて転び、テストの途中で機械やセンサーに不具合が生じ、という失敗を繰り返す日々が続きます。
そこで開発チームは、ロボットの脚における「大腿(だいたい)骨」にあたる部分に着目し、ここのパワーを上げる試みに取り組みました。すると、理想の動きにはまだ到達していないものの、ふらつきや転倒はかなり改善されました。

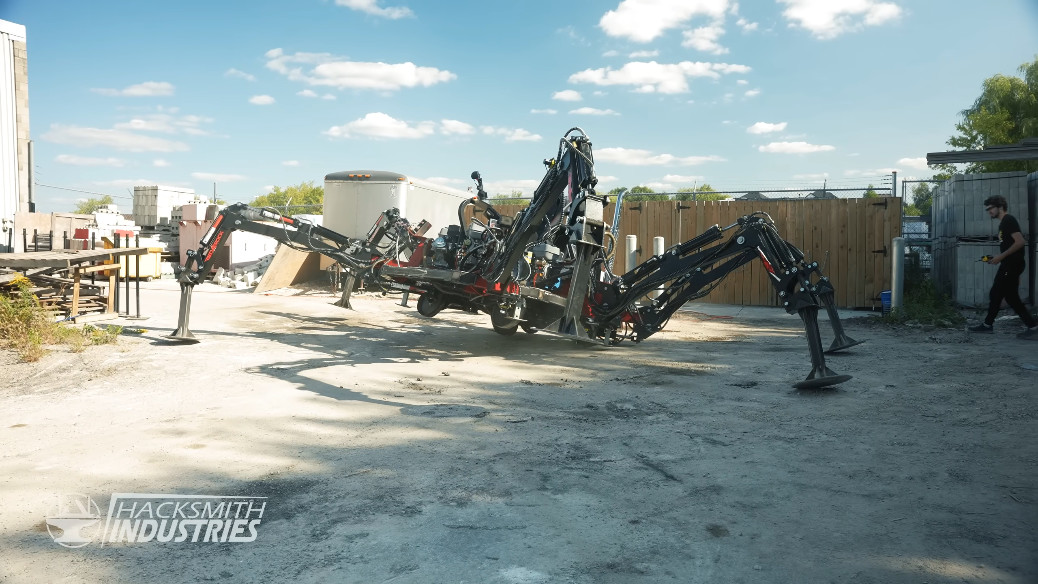
さっそくパイロットが乗り込んで操作してみると、MEGAHEXは6本の脚で高く立ちあがり、わずかな距離の移動でしたが安定した動作を見せました。

そこからさらに大腿骨部分のリニューアルや、各機構を見直してはテストするという調整を数カ月繰り返した結果、プロジェクト開始から370日目となる2022年9月13日に行った動作テストでは、これまでより大きな一歩を、これまでよりかなり安定した動作で踏み出している様子を見ることができます。

しかしそこからも、脚を2本以上上げて移動した際などに脚へかかる重量負担が大きくなってちぎれてしまったり、重要なフレームがねじれて裂けてしまったりといったトラブルは繰り返し発生しています。

当初目標としていた「6本の脚でボディを持ち上げて歩く」という結果は得られましたが、5歩進んだだけで次々に異なる場所が壊れていく機械にこれ以上多くの時間と資金を割り当てることはできず、MEGAHEXのプロジェクトはここで終了しました。最大の目標である「歩く」というゴールは達成できており、そのための過程で多くの学習をすることはできましたが、想定以上に複雑で、予想以上に多くの問題が発生したため、「正直にいうと、このプロジェクトにゴーサインを出すべきではありませんでした」とムービーの最後で伝えています。

・関連記事
世界で初めてプラズマが光の刃となるライトセーバーが開発される - GIGAZINE
スパイダーマンがウェブシューターで空中を華麗にスイングする様子を完全再現したスタントロボットが登場 - GIGAZINE
コウモリや「バック転で逃げるクモ」など自然の生き物を驚くほどリアルにメカで再現したロボット - GIGAZINE
クモの死体をロボットハンドに改造した「ネクロボット」が登場 - GIGAZINE
タンポポの綿毛のように風に乗って移動できるロボットが開発される - GIGAZINE
ミスを繰り返したロボットが人間の信頼を取り戻すことができる回数には限りがあるとの研究結果 - GIGAZINE
・関連コンテンツ






in 動画, サイエンス, Posted by log1e_dh
You can read the machine translated English article A project to create a rideable giant spi….