A project to create a rideable giant spider robot

Our BIGGEST project yet! (SPIDER MECH!)-YouTube
Giant ride-on spider robot - Raspberry Pi
https://www.raspberrypi.com/news/giant-ride-on-spider-robot/
The project for the spider robot 'MEGAHEX' started with the idea of 'an excavator that moves more flexibly by having four legs.' In order to make an excavator car that can freely change its direction, it is necessary to operate the excavator part by moving multiple legs flexibly. It is planned based on the idea of 'So what?'
In partnership with

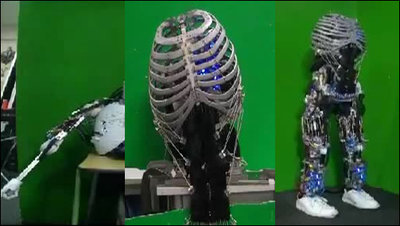
Parts had to be cut and re-welded many times to test the hexagonal frame's ability to withstand movement. The design of the body arm was originally scheduled for two days, but it seems that it took more than a week as a result.

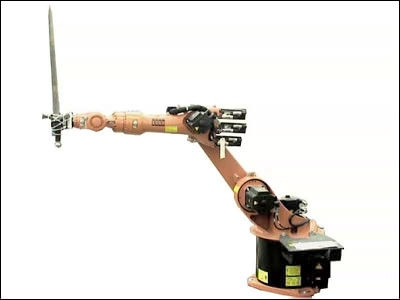
After the body was completed, work was done to attach the excavator arms that will be the legs. Hacksmith said, ``I had a lot of problems at the beginning, so I thought that the nightmare would be repeated in the subsequent work,'' while the installation of the legs proceeded smoothly.

Even if it looked complete, there was a risk that it would collapse when it was actually put into operation due to problems such as cracks in the welds and a slightly twisted frame. However, when four people boarded and actually operated it, they were able to lift the four passengers and move the arm. However, the operation of four people sharing and moving each arm is too complicated, and we have come to the conclusion that computer control is necessary.

About a month later, in order to increase the stability of MEGAHEX, the leg was changed from a shovel arm to a flat design.

In order to operate the MEGAHEX, which is now stable on its feet and capable of more complex movements, a Linux computer controls user input and data is sent to
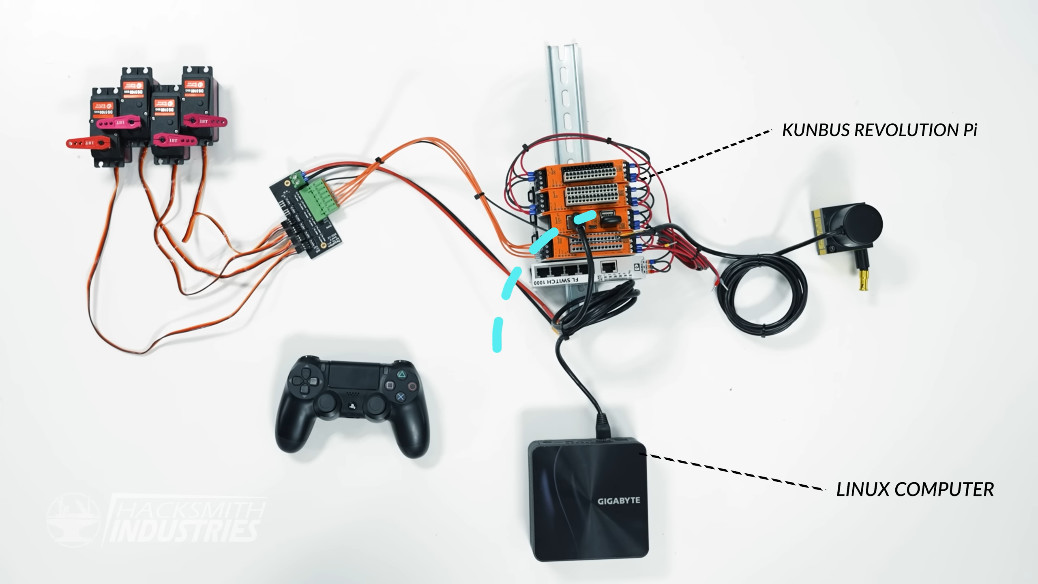
A program for how to accurately move MEGAHEX under computer control was designed by repeating simulations.
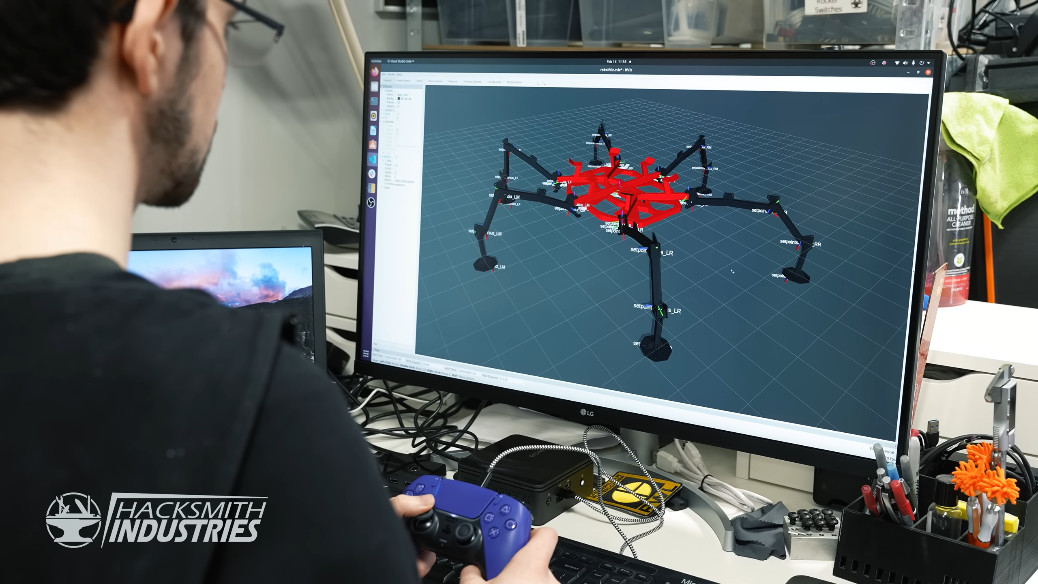
After another month, we integrated the machine and the program, and proceeded to the stage of actually operating MEGAHEX in the same way as the simulation with the game controller. Here, MEGAHEX showed a movement that 'tried to move' according to the command, but it did not go well until it actually lifted the passenger and started moving. Various attempts were made to increase power, such as lengthening the legs, reviewing

Around 300 days after the start of the project, when we increased the engine output significantly and tested it, the MEGAHEX was unstable like a small curled up spider, but it was able to move all the arms and lift the body. was successful.

By reviewing the test data, we found a problem with the program, corrected multiple codes, and uploaded it again. You can now move to

At this stage, it is possible to make MEGAHEX stand up with a single controller and move it forward, backward, left and right, but it will stagger when its own weight is applied to its legs, and if the burden becomes too large, it will stop moving, and it will not be able to step forward. I could do it, but I didn't have enough power to pull a huge body with my legs. However, it was said that it was a good finish as the first test because it did not break anywhere and there was no trouble igniting with heat. After that, tests were repeated to ensure smooth movement, but the days of repeated failures continued, such as staggering and falling after taking a step, and malfunctions in the machine and sensors occurred during the test.
Therefore, the development team focused on the part corresponding to the 'femur (approximately) bone' in the leg of the robot and worked on an attempt to increase the power here. As a result, although I haven't reached my ideal movement yet, my staggering and falling have improved considerably.

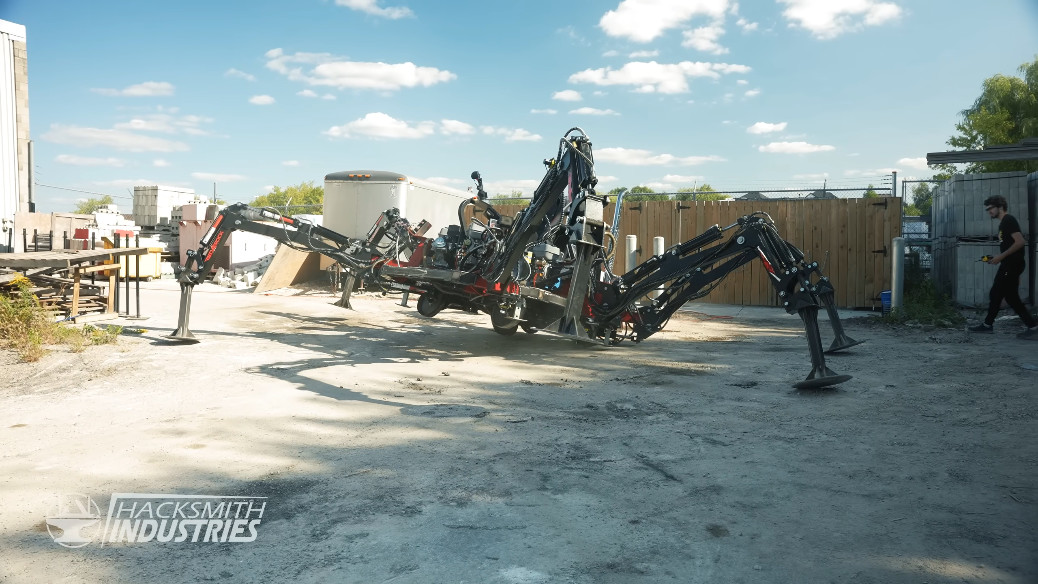
As soon as the pilot got in and tried to operate it, MEGAHEX stood high on its six legs and showed stable movement even though it moved a short distance.

From there, we repeated several months of adjustments such as renewing the femoral part and reviewing and testing each mechanism. You can see how it is taking a big step with much more stable movement than before.

However, even from there, troubles such as the weight load on the legs becoming too large and tearing off when moving with two or more legs raised, or the important frame being twisted and tearing, have repeatedly occurred.

We were able to achieve the initial goal of 'lifting the body with six legs and walking', but we allotted more time and money to the machine, which breaks down in different places one after another after taking only five steps. The MEGAHEX project ended here. I was able to achieve my biggest goal of walking, and I learned a lot in the process. In other words, I shouldn't have given the go-ahead to this project,' he tells me at the end of the movie.

Related Posts: