




コウモリや「バック転で逃げるクモ」など自然の生き物を驚くほどリアルにメカで再現したロボット

驚くほどリアルに生き物の動きをメカニカルに再現し、でも実際の使い道はほとんどないという実に魅力的(?)なロボット作りを行っているドイツの企業「Festo」が、新たにコウモリとクモの動きを再現するロボットを発表しています。コウモリは実際に翼を羽ばたかせて自力で空を飛び、クモは走って逃げる途中にバック転を組み込むという一風変わった走り方をする種の動きが見事に再現されています。
BionicFlyingFox | Festo Corporate
https://www.festo.com/group/en/cms/13130.htm
Festo's New Bionic Robots Include Rolling Spider, Flying Fox - IEEE Spectrum
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/festo-bionic-learning-network-rolling-spider-flying-fox
このロボットを作ったFestoは、ドイツに拠点を置く世界的な空気圧機器メーカー。同社は自然界の動きを機械で再現してオートメーション技術に結び付けるBionic Learning Networkの研究を行っており、これまでにもチョウやクラゲ、ペンギンなどを驚くほどリアルに再現したロボットが作られています。そんなFestoが作ったコウモリのロボットの様子は以下のムービーから。
Festo – BionicFlyingFox (English/Deutsch) - YouTube

建物の天井から、何やらぶら下がる物体。

よく見れば、翼を畳んでぶら下がっているコウモリのロボット。顔の周りもリアルに作られていることがわかります。

すると、翼を広げ……

フワリと落下

そして、すぐさま翼を動かしてまるで本物のコウモリのように飛ぶではありませんか。

2本の前脚を広げて翼を羽ばたかせ、2本の後脚でバランスをとる様子は、まるで本物のコウモリ。

リアルに見える理由は、何といっても翼の動きにあります。本物のコウモリのように、翼を持ち上げる時は関節から先の部分を折り畳んでおき……

下へと翼を振り下ろす時には、空気をいっぱいに受け止められるように翼を最大限に広げています。

この動きを再現しているのが、本体内に埋め込まれた複数のモーターとリンク機構。

2個の小型モーターと、1個のブラシレスDCモーターを使って動きを制御し、さらに複雑なリンクを介して力を伝えることで、本物のコウモリのような複雑な動きを再現。
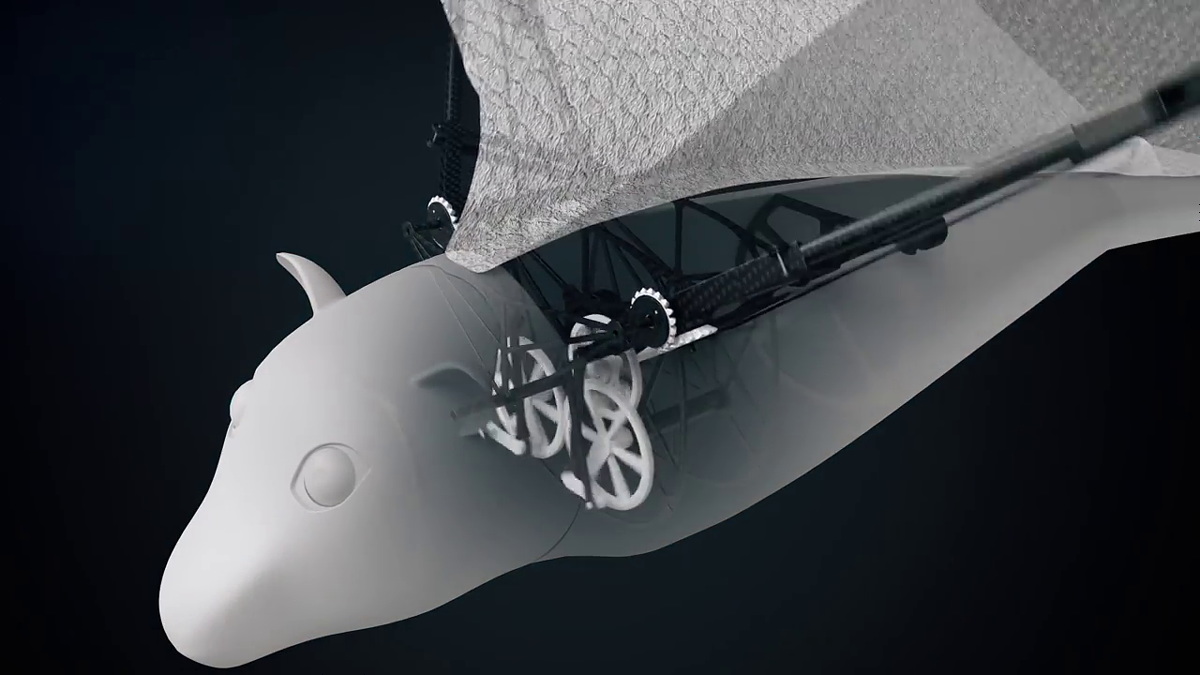
よく見れば、翼の中にある「指」が進化した骨格もリアルに再現されていることがわかります。

このコウモリは全長約80cm、全長約2メートルという巨体でありながら、体重はおよそ500グラムと非常に軽量になっています。翼は、弾力性のある繊維「エラスチン」でできた織物を、2枚の超軽量で超薄の膜で挟み、4万5000カ所で溶着することで、薄くて強く、シワになりにくい構造に作られているそうです。

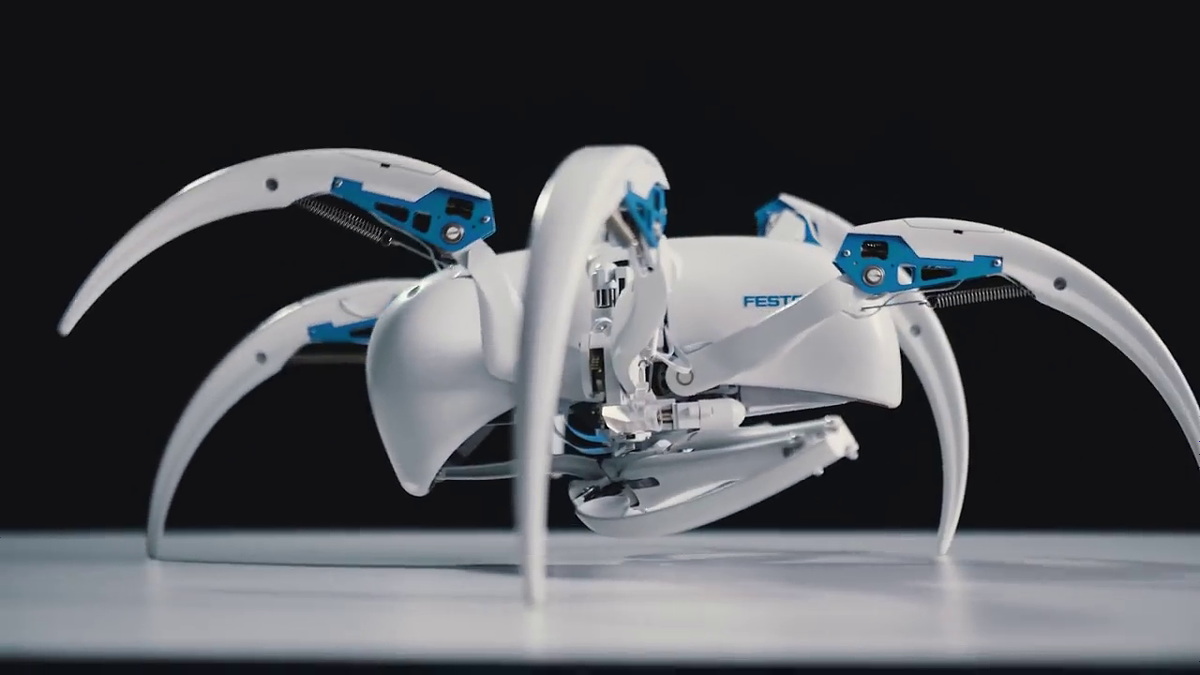
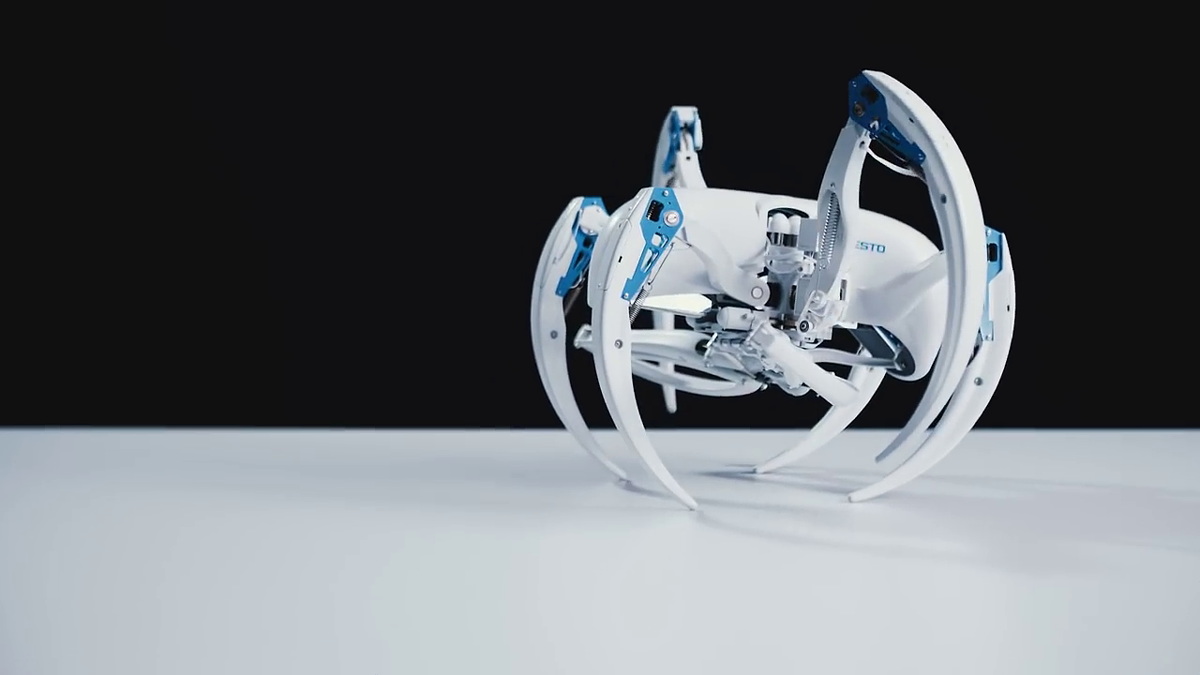
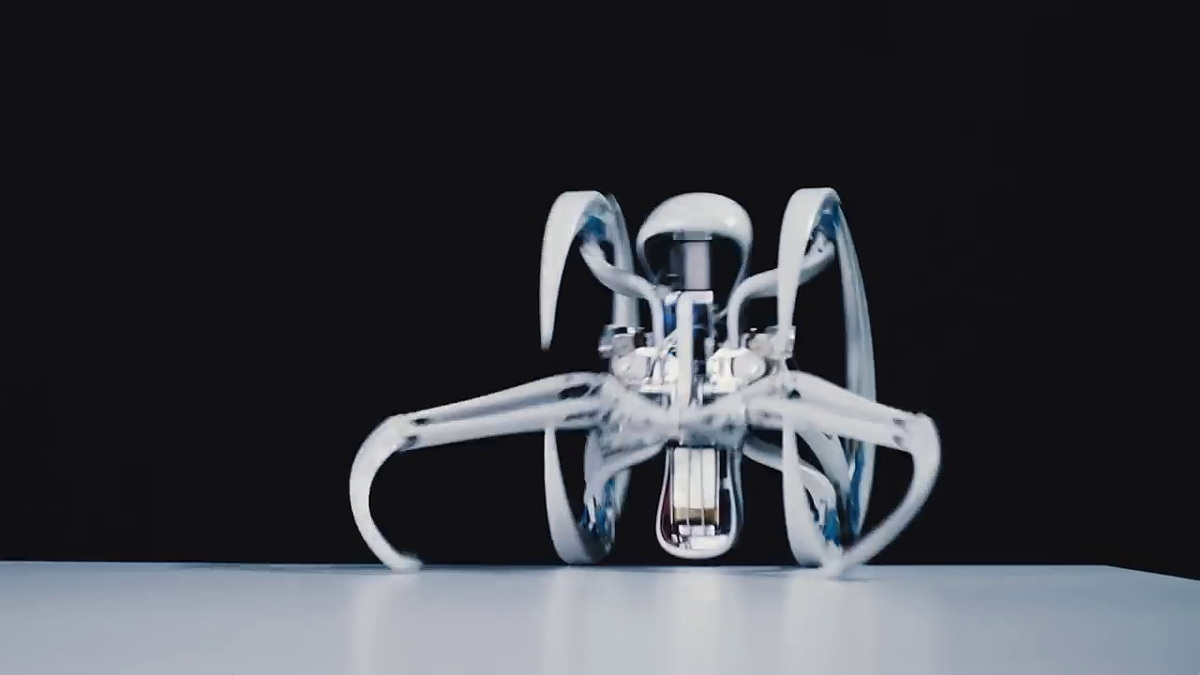
一方、危険を察知した時にバック転しながら逃げるクモ「ケブレヌス・レケンベルギ」の動きを再現したロボットがコレ。脚を畳んで球体の形にすることで、クルンクルンと回るようになっています。
Festo – BionicWheelBot (English/Deutsch) - YouTube

モロッコのシェビ大砂丘に生息するクモ、ケブレヌス・レケンベルギは危険から逃げる時に一風変わった動きを見せます。
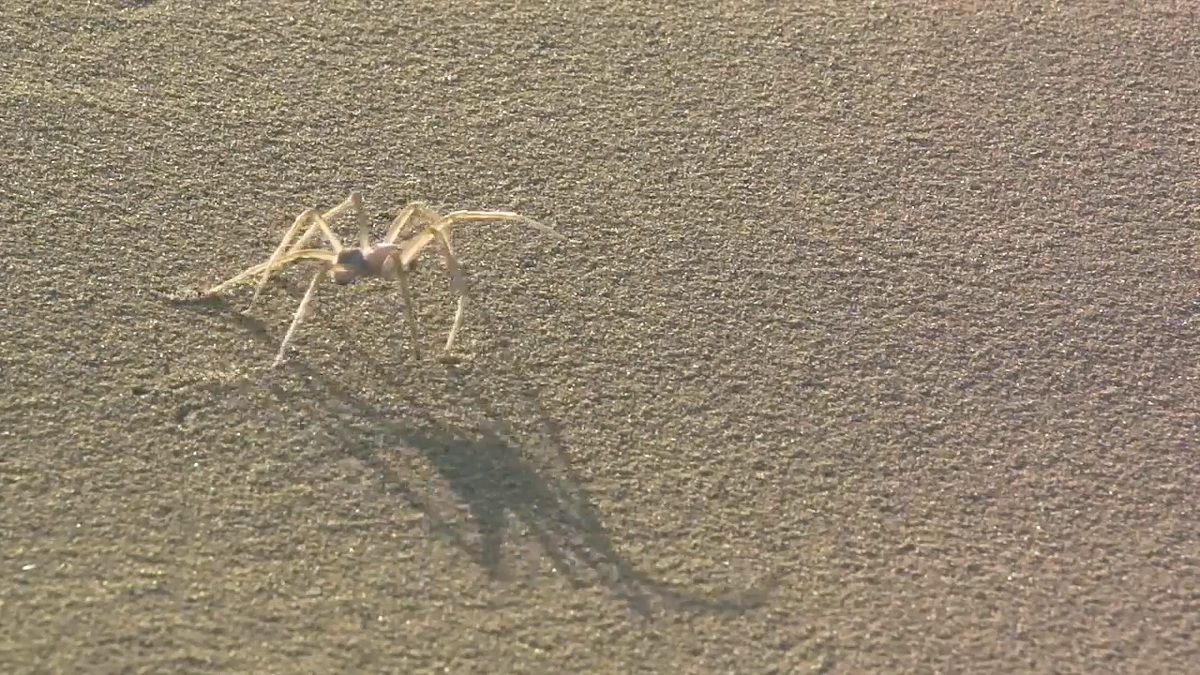
静止画ではわかりにくいのですが、いまこのクモは背中を地面に向けて裏返っている状態。まるでアクロバチックチームが激しい動きを見せるように、バック宙しながら危険から遠ざかるのがこのクモの特長です。

そんな動きを再現するのが、このロボット。
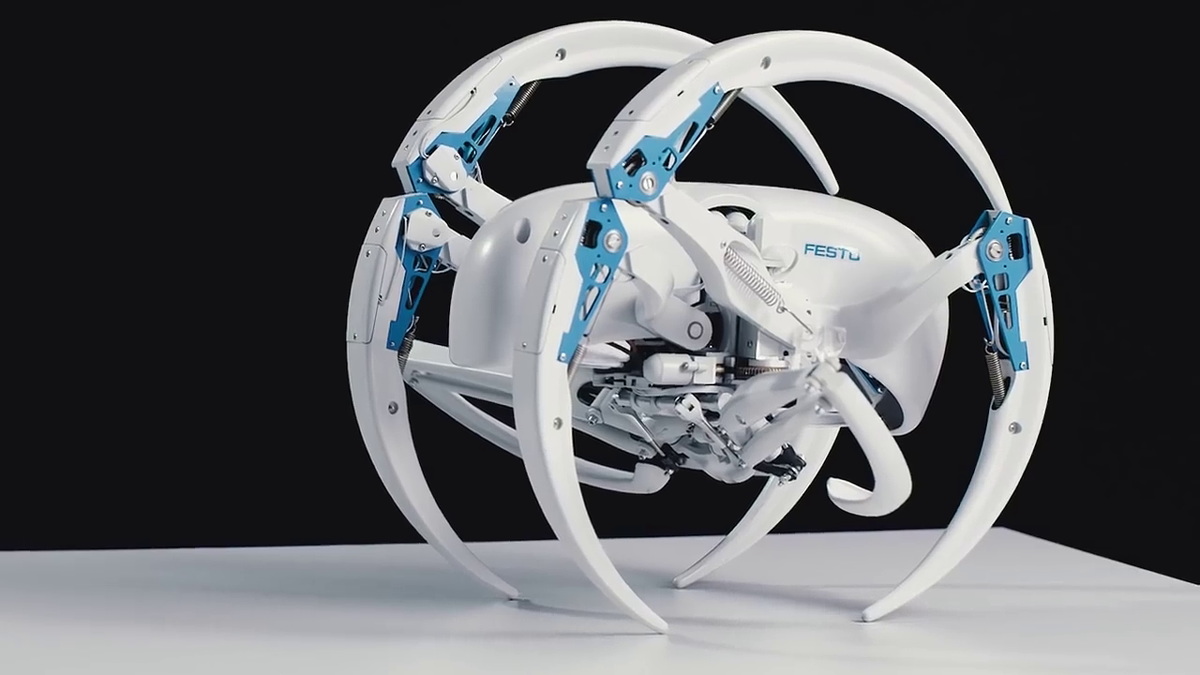
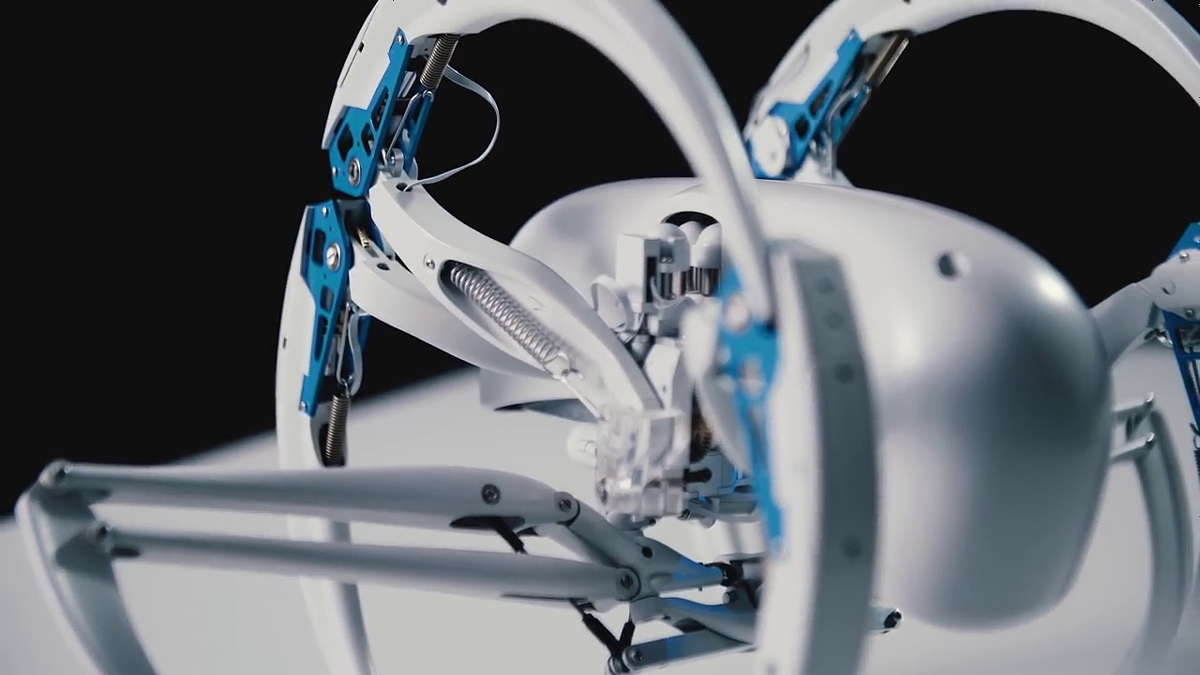
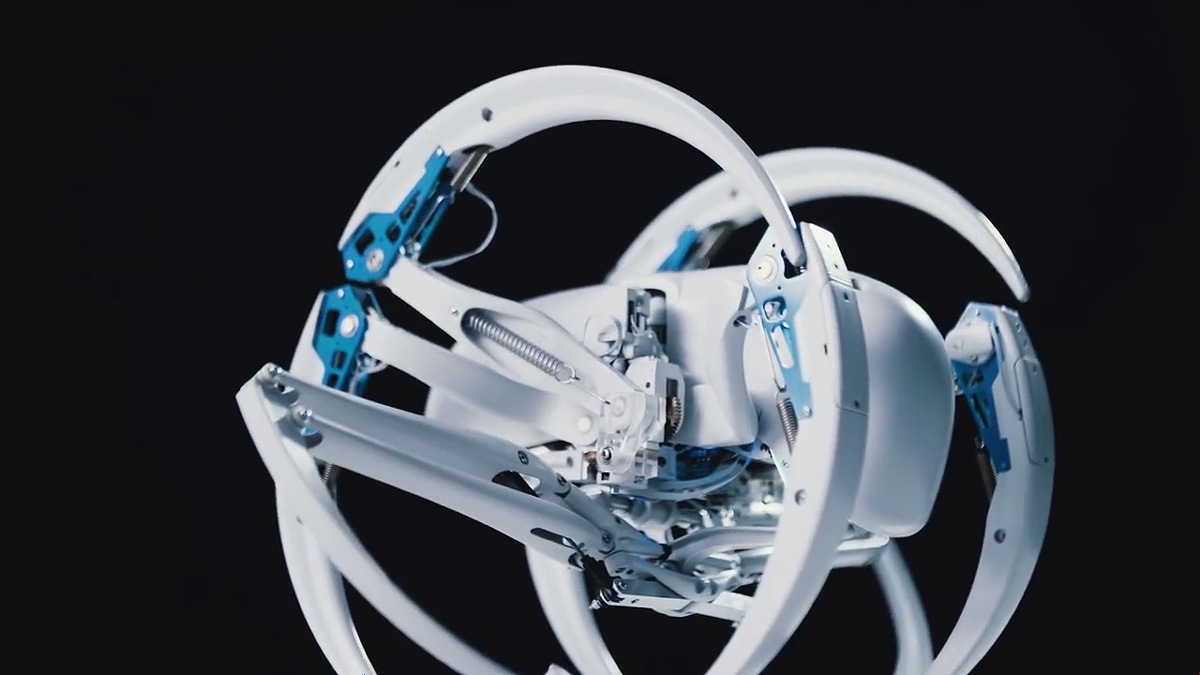
脚の付け根や関節には、メカメカしい雰囲気が漂います。
タブレットのボタンをポチッとすると……
8本の脚を広げて立ちあがりました。

このまま普通に歩くこともできるのですが……
見せ場はここから。まず、2本の脚を畳み……
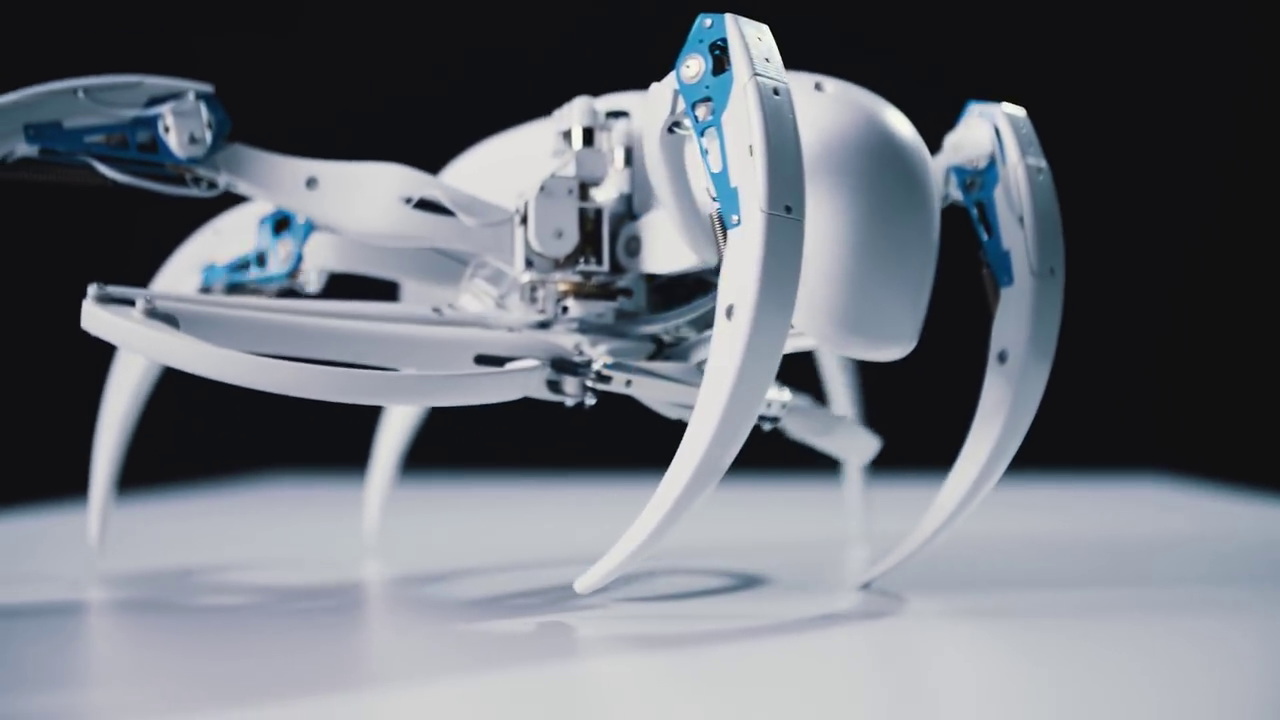
続いて反対側の脚も折り畳みます。
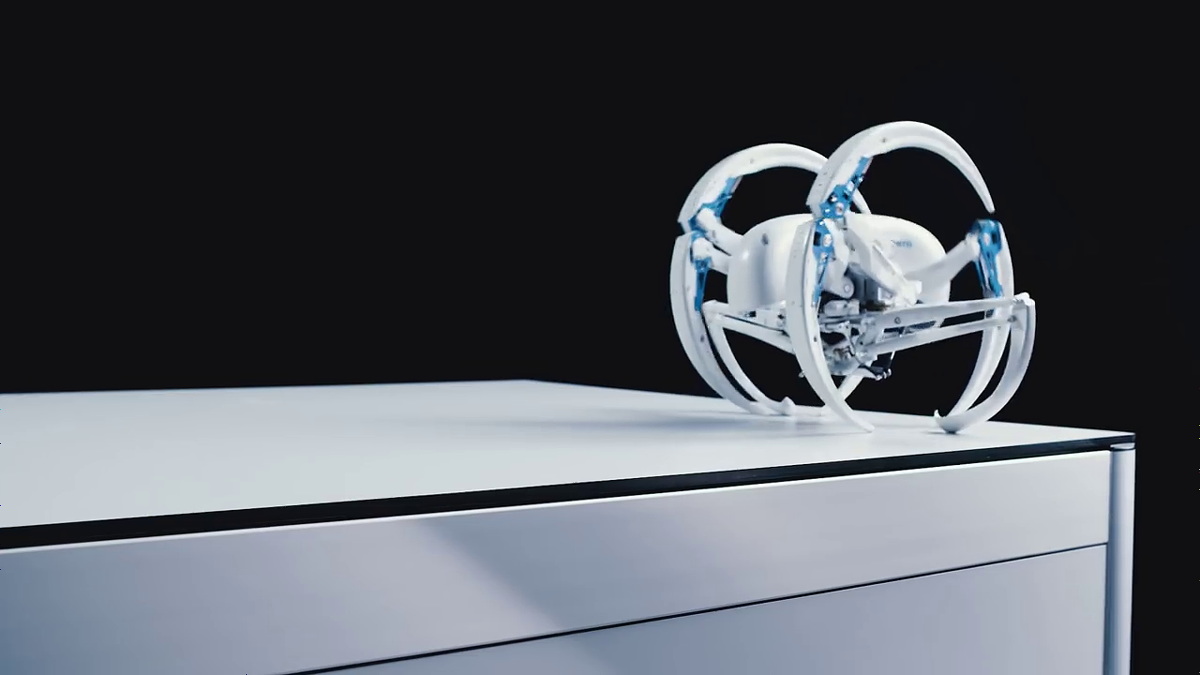
下半分が球体状になったところ。
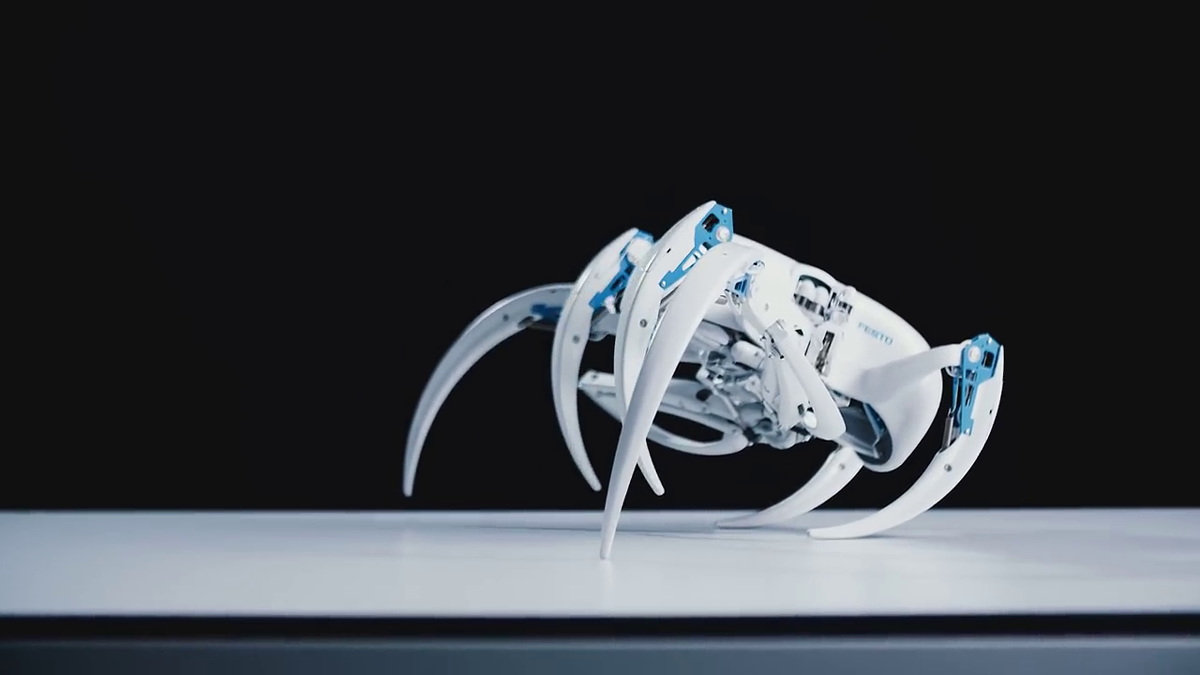
そして3対めの脚を体の上に持ってくると、3対の足を使ってタイヤのような構造が作られました。
そしてこの状態で、最後の4対めの脚を使って地面を蹴り出すと……
グリンと回転
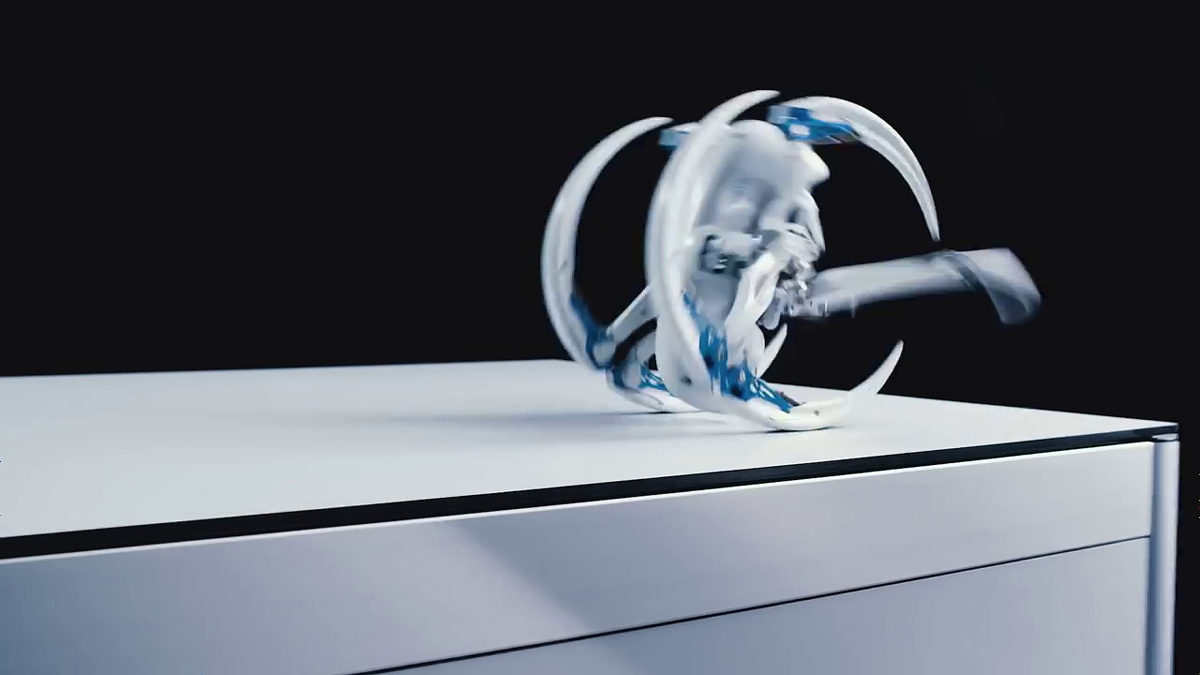
本物のケブレヌス・レケンベルギとは少し異なった動きですが、たしかにバック宙しながら逃げているっぽい様子が再現されていました。
Festoでは、このような生物の動きを再現する機械の研究を進めているとのこと。このように、タコの吸盤の仕組みを使ったロボットアームや……
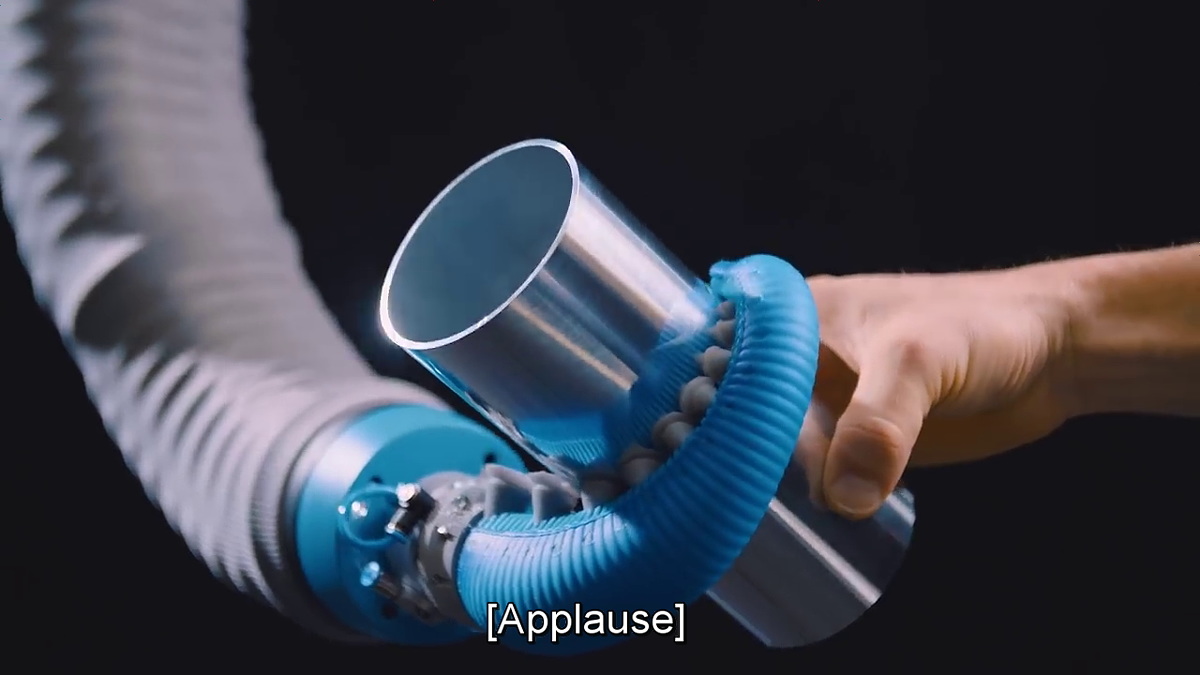
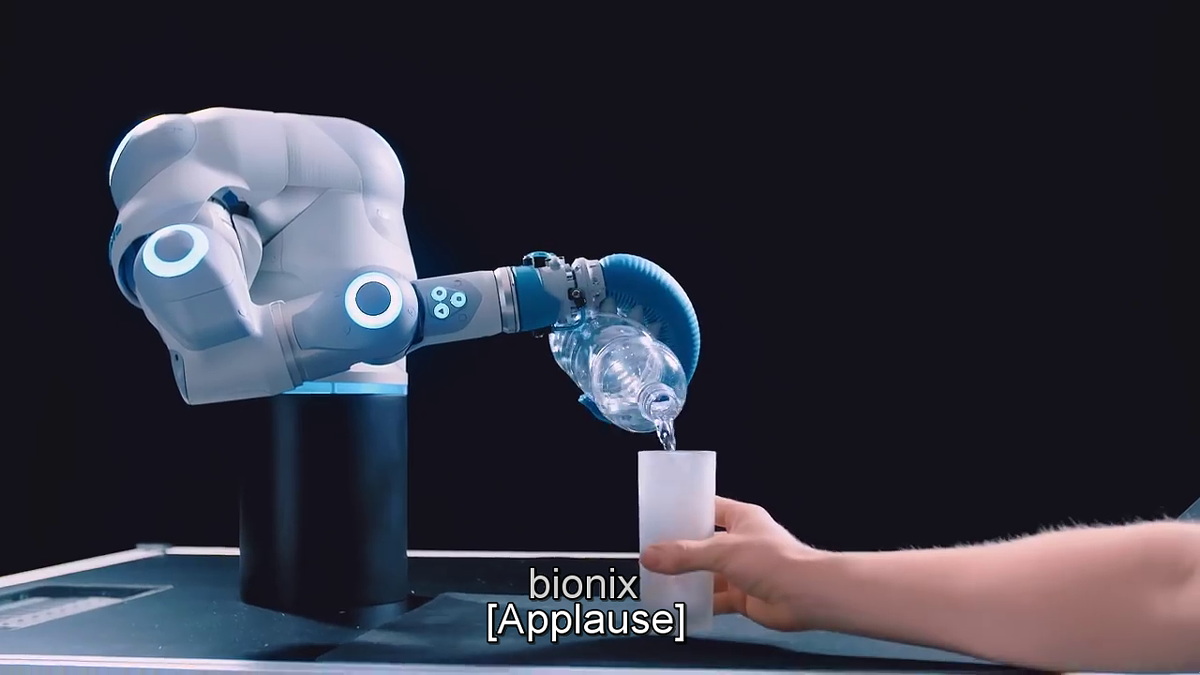
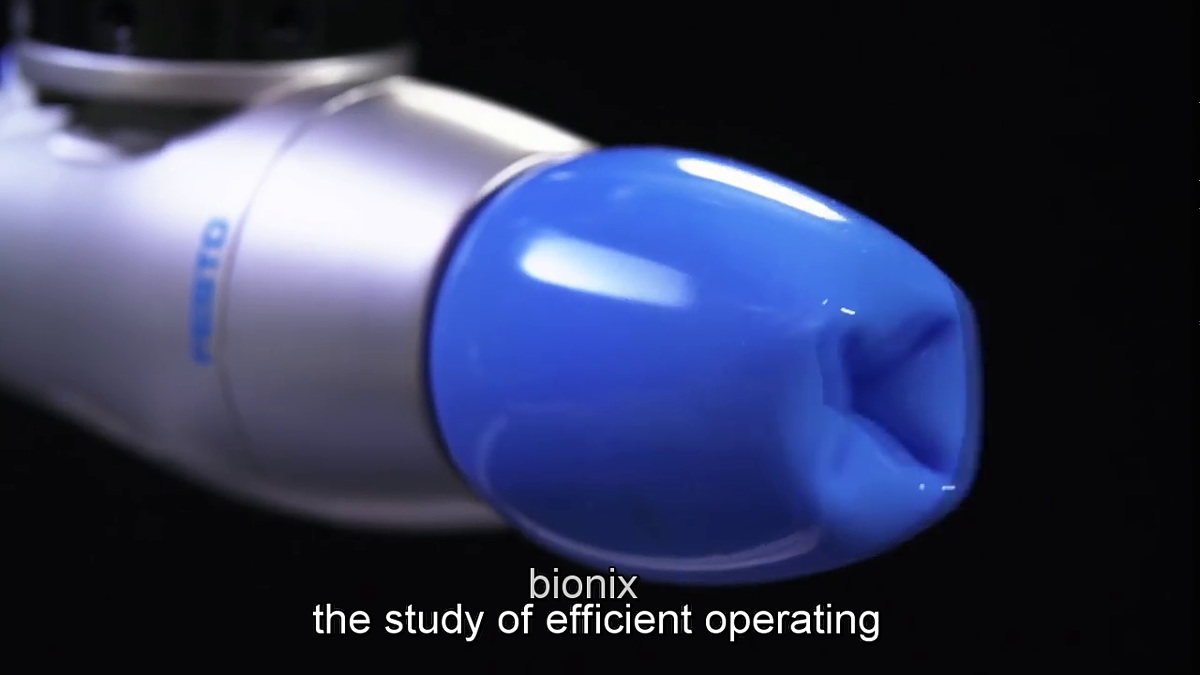
柔らかい突き出し部分を凹ませることで、取っ手をガッチリとつかむ装置などが開発されています。

Festoはまた、トンボやチョウ、アリ、クラゲなどのロボットを作成して公開しています。以下のムービーではそんなロボットを使い、子どもたちに生物をエンジニアリングで再現する様子を説明しているところを見ることができます。
Festo – Bionics4Education (English) - YouTube

・関連記事
ボストン・ダイナミクスの新映像は「ドアノブをつかんでドアを開ける」4足歩行ロボット - GIGAZINE
バク宙可能な人型ロボット「Atlas」をボストン・ダイナミクスが開発中、驚異的な運動能力を身につけていることが判明 - GIGAZINE
人型ロボ「アトラス」が倒されても荷物を奪われてもめげずに任務を遂行するシュールなムービー - GIGAZINE
驚異のバランス感覚&ジャンプを披露する奇妙な見た目の新型ロボットをボストン・ダイナミクスが公開 - GIGAZINE
人間とほぼ同じ構造のロボットアーム - GIGAZINE
・関連コンテンツ







in 動画, ハードウェア, 生き物, Posted by darkhorse_log
You can read the machine translated English article A robot that reproduces natural creature….