




無料で物理演算エンジン「MuJoCo」がダウンロード可能に、DeepMindの買収により
Googleの兄弟会社である人工知能開発企業の「DeepMind」が、物理演算エンジン「MuJoCo」の買収を2021年10月18日付けで発表しました。買収に伴い、MuJoCoは誰でも無料でダウンロード可能になります。
Opening up a physics simulator for robotics | DeepMind
https://deepmind.com/blog/announcements/mujoco
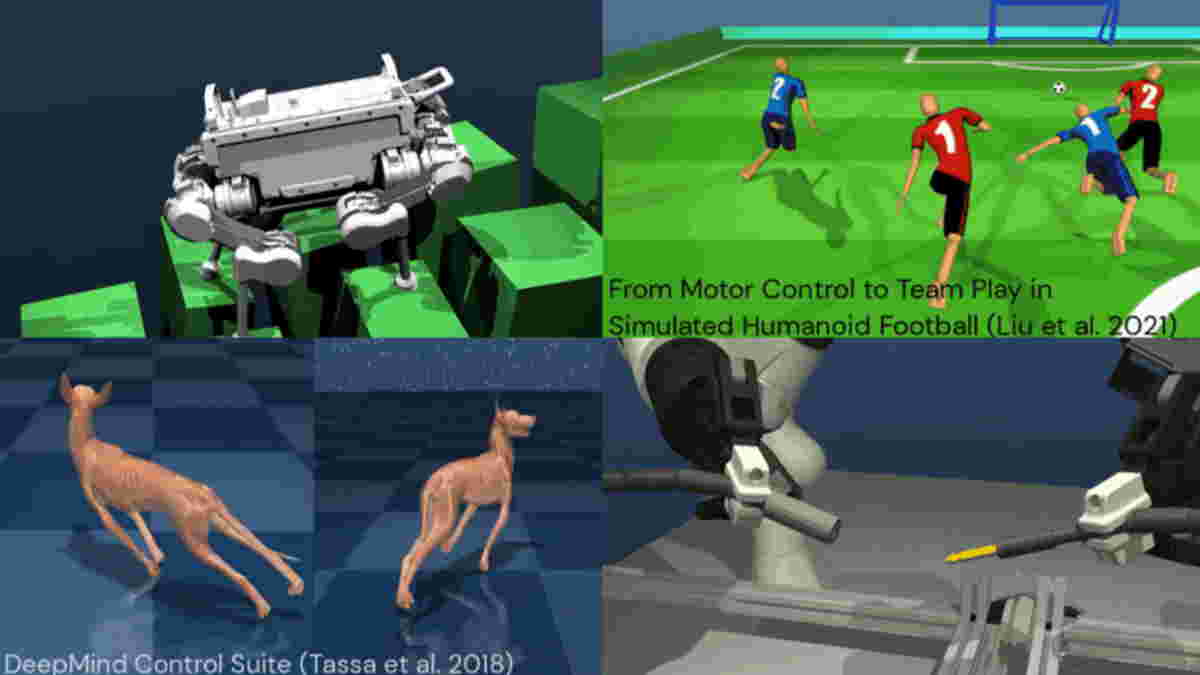
MuJoCoは「Multi-Joint dynamics with Contact」を略した言葉で、多関節の動力学シミュレーションに適した物理エンジンです。MuJoCoはワシントン大学・移動制御研究室のEmo Todorov氏によって開発され、2015年からはRobotiを通じて有料で商用提供されていましたが、買収に伴いApache License 2.0のもとで無料ダウンロードが可能になりました。
ダウンロードは以下から行えます。
MuJoCo — Download
https://www.mujoco.org/download
「歩く時に地面と足が接触する」「物を書く時にペンと手が接触する」など、物理的な世界では多くの場面で「接触」が起こります。しかし、接触は物体の柔らかさや粘着性、弾性といった要素によって変化するため、コンピューターシミュレーションでは非常に複雑な作業になるとのこと。さまざまな接触を再現しつつも効率的であるMuJoCoは、ロボット工学の研究者にとっての主要な選択肢となっており、DeepMindは研究を支援すべくMuJoCoを買収し無料化を図ったと述べています。また、DeepMindのロボット工学チームは以前からMuJoCoを使用しており、今後はコミュニティと協力しつつ、オープンソースソフトウェアとしてMuJoCoを改善しつづける意向です。
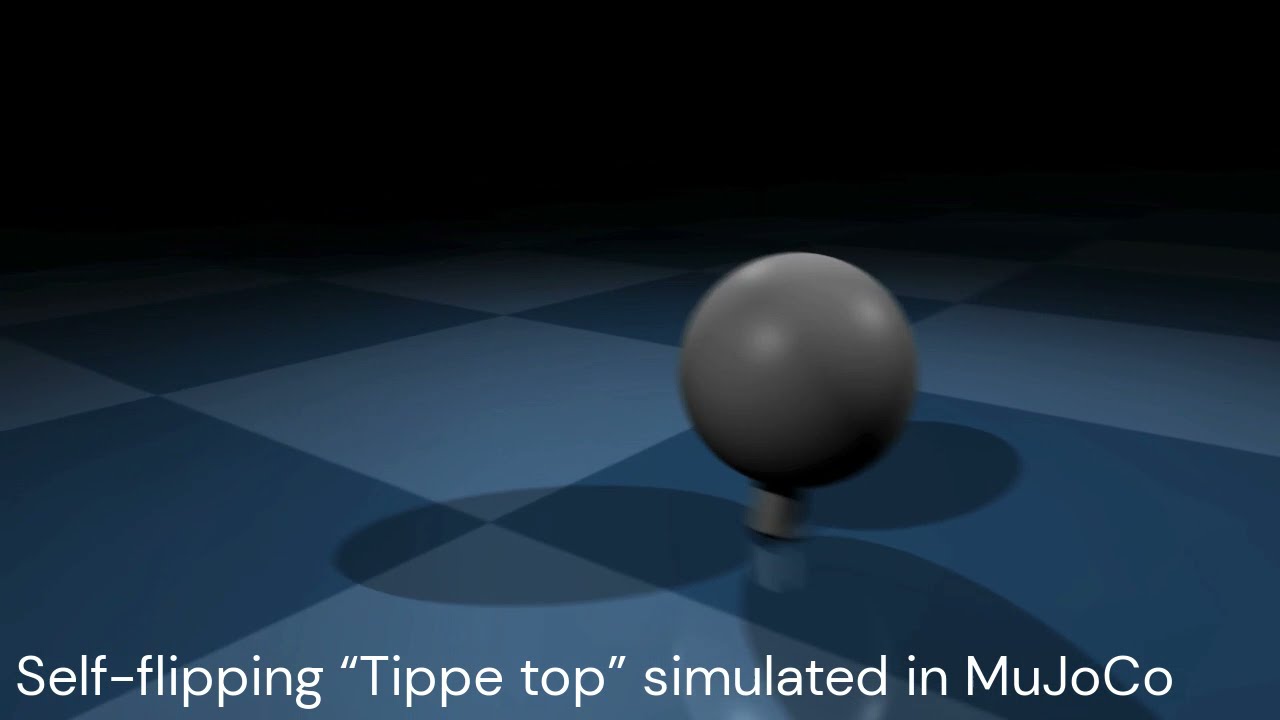
金属のコマを回した時の実際の様子と、MuJoCoのシミュレーションは以下から比較できます。MuJoCoではさまざまなパラメーターを調整可能であり、現実の接触にかなり近づけることが可能とのこと。
以下が本物のコマを回す様子で……
Self-flipping Tippe Top - YouTube

こっちがMuJoCoのシミュレーション。
Self-flipping Tippe top in MuJoCo - YouTube
2021年1月に発表されたロボット工学におけるシミュレーションの使用状況を調査した研究では、研究を進める上でのオープンソースツールの重要性が強調されました。論文著者は、「オープンソースのシミュレーションプラットフォームを開発・検証すること」と、「認証済みのモデルについてオープンかつコミュニティーベースのライブラリを構築すること」を推奨しており、DeepMindはこの推奨事項に沿って、MuJoCoをオープンソースのコミュニティ主導プロジェクトとして開発・維持していくと述べています。
なお、GitHubリポジトリへは以下からアクセス可能です。
GitHub - deepmind/mujoco: Multi-Joint dynamics with Contact. A general purpose physics simulator.
https://github.com/deepmind/mujoco
・関連記事
体をひねって着地するネコの動きを物理演算で作ってガンダムで解説 - GIGAZINE
2次元物理計算エンジンをブラウザで実現する「Matter.js」 - GIGAZINE
FPSにおける射撃のシミュレーションはどのように発展したのか? - GIGAZINE
「現実の車の動きをゲームで再現する方法」を実際のゲーム開発スタッフに直撃したムービーが公開中 - GIGAZINE
AIで宇宙を超高速かつ高精度でシミュレーションする技術が登場、560時間かかっていた解析をたった36分で処理 - GIGAZINE
「我々はコンピューターのシミュレーションの中で生きているわけではない」と研究者 - GIGAZINE
・関連コンテンツ





in ソフトウェア, サイエンス, Posted by darkhorse_log
You can read the machine translated English article The physics engine 'MuJoCo' can be downl….