The physics engine 'MuJoCo' can be downloaded for free with the acquisition of DeepMind.
Google's brother company DeepMind , an artificial intelligence development company, announced the acquisition of the physics engine MuJoCo on October 18, 2021. With the acquisition, MuJoCo will be available for free download to anyone.
Opening up a physics simulator for robotics | DeepMind
https://deepmind.com/blog/announcements/mujoco
MuJoCo is an abbreviation for 'Multi-Joint dynamics with Contact' and is a physics engine suitable for articulated dynamics simulation. MuJoCo was developed by Emo Todorov of the University of Washington's Mobile Control Laboratory and has been commercially available through Roboti since 2015, but with the acquisition it is now available for free download under the Apache License 2.0. rice field.
You can download it from the following.
MuJoCo — Download
https://www.mujoco.org/download
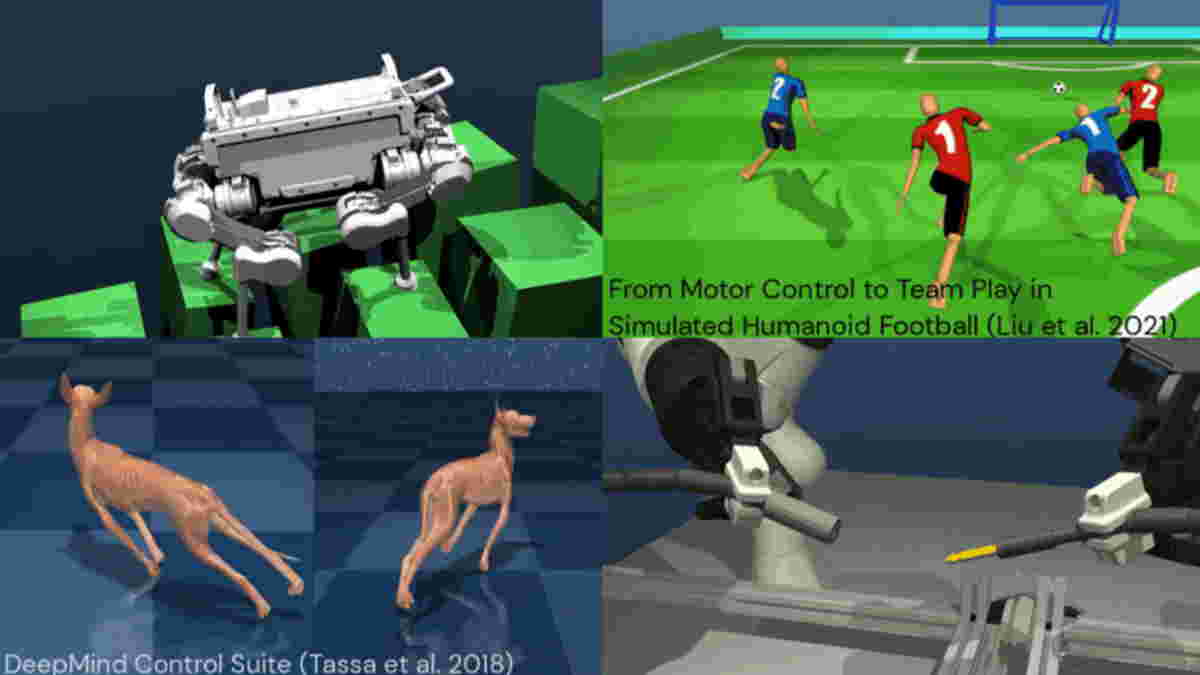
In the physical world, 'contact' occurs in many situations, such as 'the ground comes into contact with the foot when walking' and 'the pen touches the hand when writing'. However, since contact changes depending on factors such as the softness, adhesiveness, and elasticity of the object, it is a very complicated task in computer simulation. MuJoCo, which reproduces various contacts but is efficient, has become a major choice for robotics researchers, and DeepMind says it has acquired MuJoCo to support its research and made it free. In addition, DeepMind's robotics team has been using MuJoCo for some time and intends to continue improving MuJoCo as open source software in the future, working with the community.
The actual state when turning the metal top and the simulation of MuJoCo can be compared from the following. With MuJoCo, various parameters can be adjusted, and it is possible to get very close to actual contact.
The following is how to turn a real top ...
Self-flipping Tippe Top --YouTube
This is a simulation of MuJoCo.
Self-flipping Tippe top in MuJoCo --YouTube
A study published in January 2021 investigating the use of simulation in robotics emphasized the importance of open source tools in advancing research. The author recommends 'developing and validating an open source simulation platform' and 'building an open and community-based library for certified models,' and DeepMind follows these recommendations. , MuJoCo will be developed and maintained as an open source community-led project.
You can access the GitHub repository from the following.
GitHub --deepmind / mujoco: Multi-Joint dynamics with Contact. A general purpose physics simulator.
https://github.com/deepmind/mujoco
Related Posts: