




観測用レーダー搭載ドローンを自作した猛者が登場、上空を移動して広大な範囲を観測可能
合成開口レーダーとは、レーダー装置そのものが直線移動することにより、実際のレーザーの開口面よりも大きな開口面を持つ仮想レーダーとして機能するレーダー観測装置です。レーダーを小型ドローンに搭載することで合成開口レーダーを自作し、上空から画像撮影する過程を電気技師であるヘンリック・フォルステン氏が解説しました。
Homemade polarimetric synthetic aperture radar drone - Henrik's Blog
https://hforsten.com/homemade-polarimetric-synthetic-aperture-radar-drone.html
レーダーに使用される光の波長は、通常の写真や赤外線カメラに使われる可視光や赤外線よりも長いため、雨粒や雲を透過して地表や海面の観測が可能です。しかし、波長が長いと分解能が下がるという欠点があり、高い解像度の画像を得るためにはレーダーアンテナの開口部をより大きくしなくてはなりません。この問題を解決するため、レーダーそのものを大きくするのではなく、レーダーを移動させて「直線に並んだ複数の仮想レーダーが観測したデータ」を合成することで、解像度の高い画像を得るのが合成開口レーダーです。
フォルステン氏は以前から自作のレーダーを作り、地上で合成開口レーダーのテストを行ってきました。いつかはドローンにレーダーを搭載し、上空から合成開口レーダー画像を撮影したいと思っていたそうですが、数年前はレーダーを搭載できる最低価格のドローンでも約1000ユーロ(約16万円)以上したため手がでなかったとのこと。
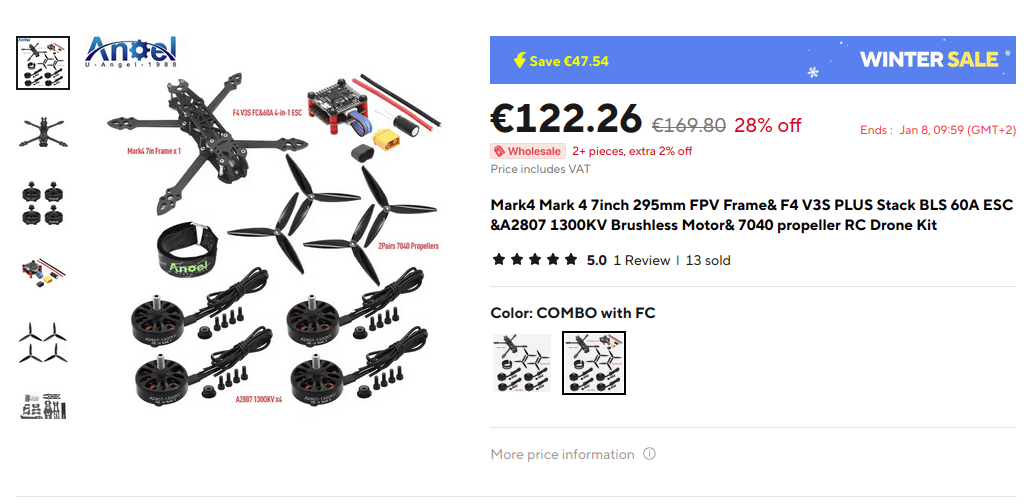
しかし、近年は小型ドローンの価格が大幅に下がっており、小型の5~7インチ(約13~18cm)程度のドローンが中国から100ユーロ(約1万6000円)程度で購入可能になっています。これらの小型ドローンは1kg以上の荷物を運ぶことが可能であり、これは小さなレーダーを搭載するには十分な積載量だとのことで、フォルステン氏は約122ユーロ(約1万9000円)の中国製7インチドローンと、自律飛行をサポートするGPSおよびコンパスモジュールを購入しました。
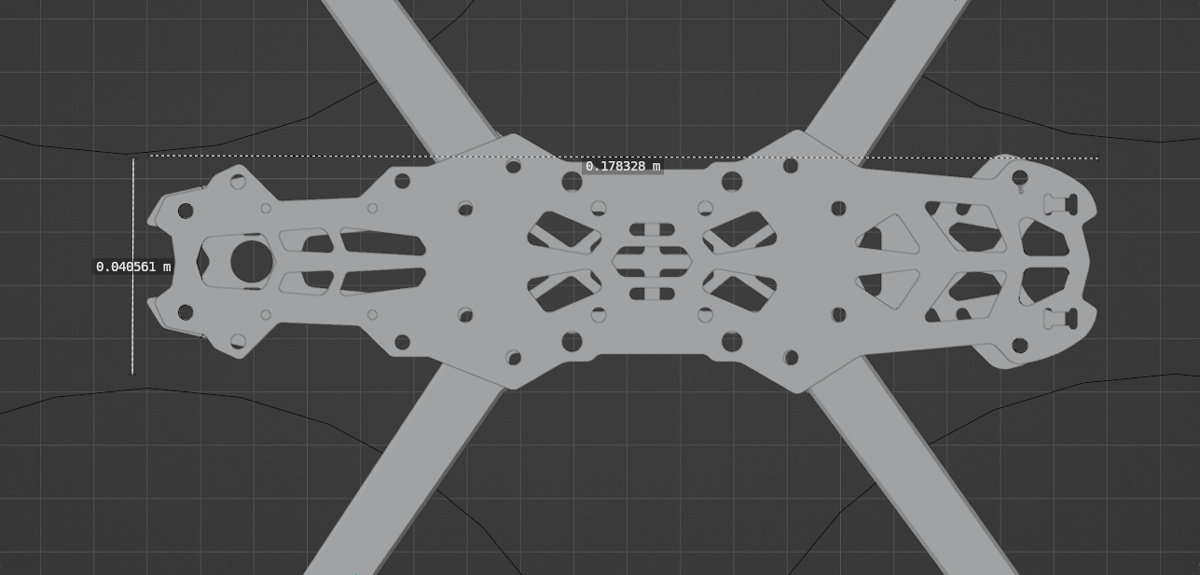
以下が、実際にフォルステン氏が購入したドローンの寸法を3Dモデルで表したもの。横幅がわずか4cm、縦幅もわずか17.8cmとかなり小さめで、レーダーも可能な限り細いものにする必要がありました。
実際にフォルステン氏が製造したプリント基板がこれ。6つの層からなっており、コンポーネントを密集して配置し、サイズを最小限にしたとのことです。
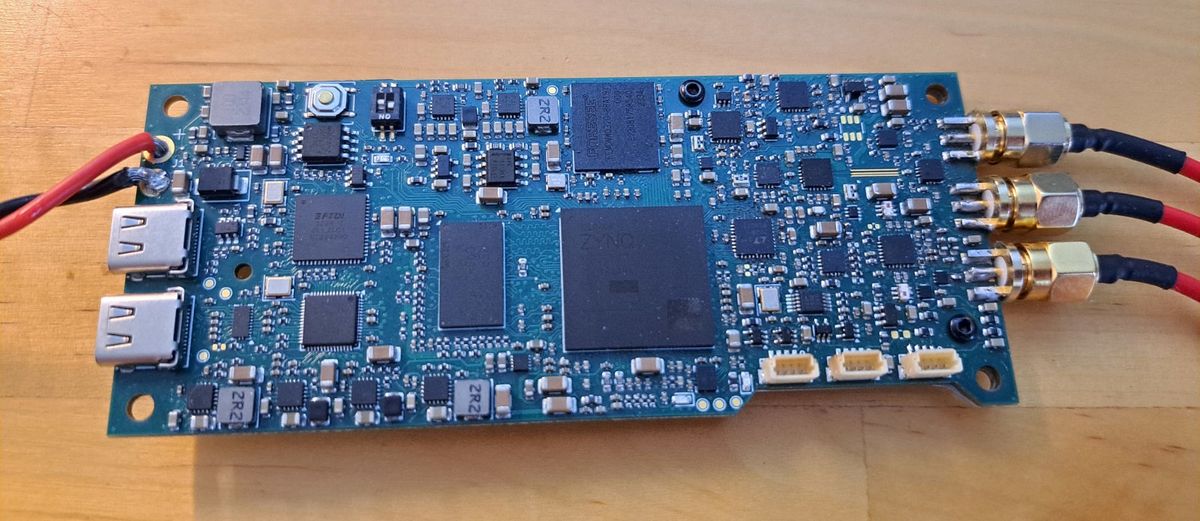
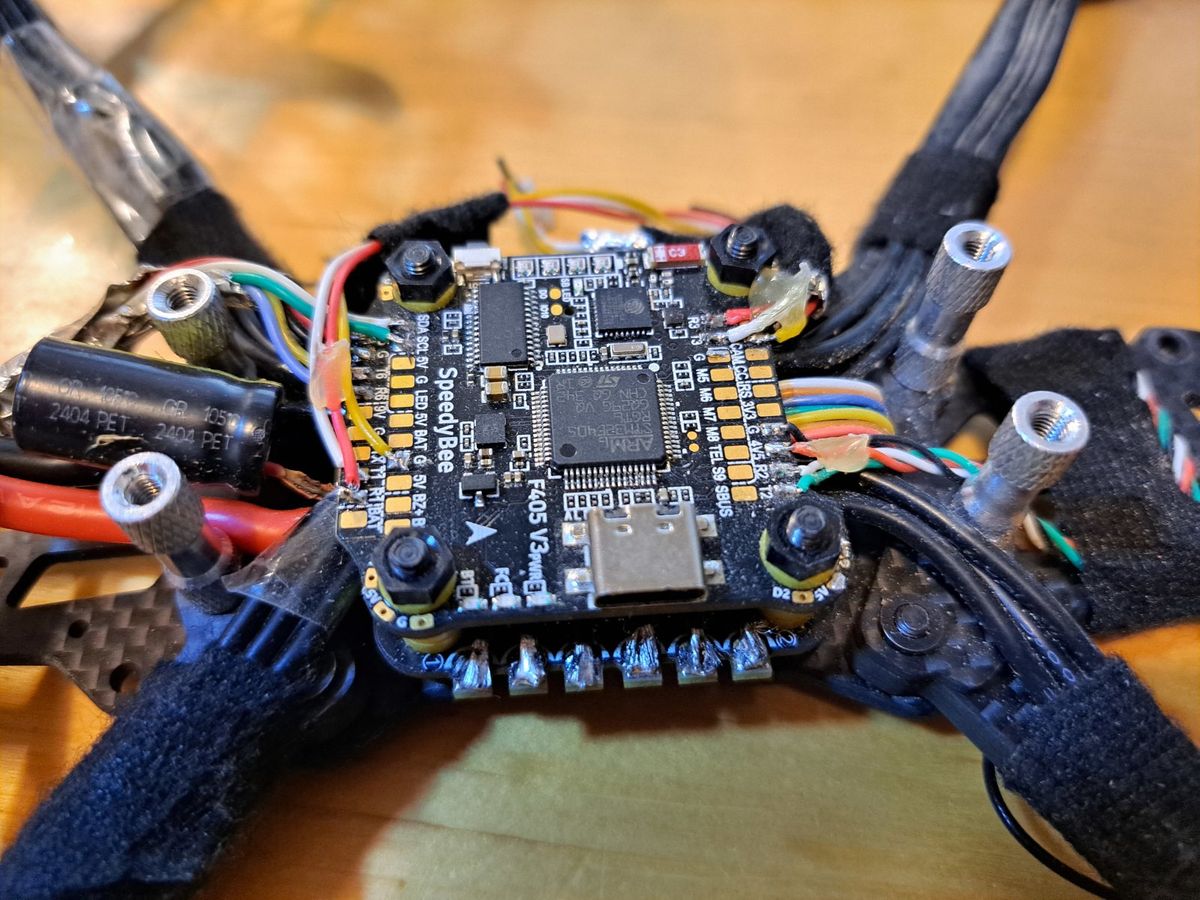
以下はドローンに搭載したフライトコントローラーです。ドローンにはもともと1MBのフラッシュメモリを備えたローエンドのフライトコントローラーが付属していましたが、フォルステン氏は2MBのフラッシュメモリを持つもう少し性能の高いフライトコントローラーを購入しました。また、フライトコントローラーソフトウェアには、最先端の自律飛行機能を持つArduPilotを採用しました。ArduPilotの大きな特徴は、慣性計測装置(IMU)とGPSセンサーを融合する非常に優れたアルゴリズムを備えており、位置情報精度が高いという点です。ドローンを用いた合成開口レーダーでは、観測のピントを合わせるために正確な位置情報が必要なため、位置情報精度にはこだわる必要がありました。
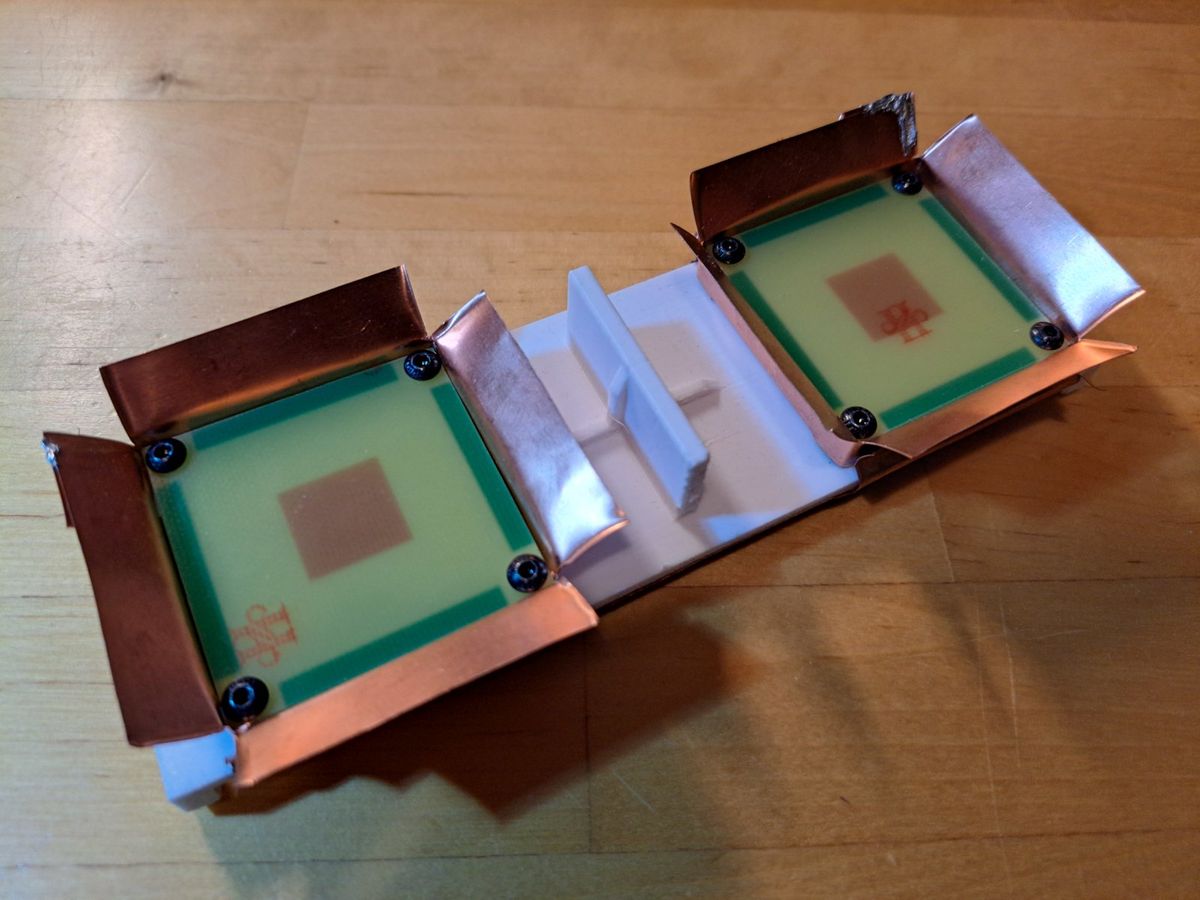
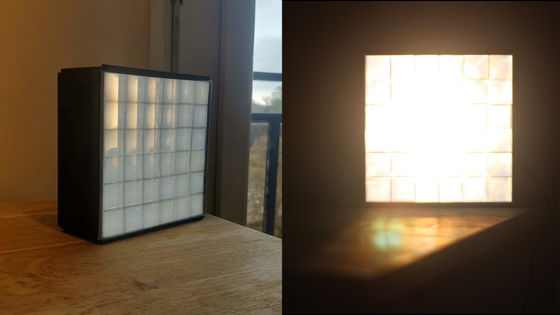
そしてドローンに搭載するレーダーアンテナが以下。水平と垂直の2種類の電波を用いる二重偏波レーダーで、開口部の大きさは6.5cm×6.5cmとなっています。
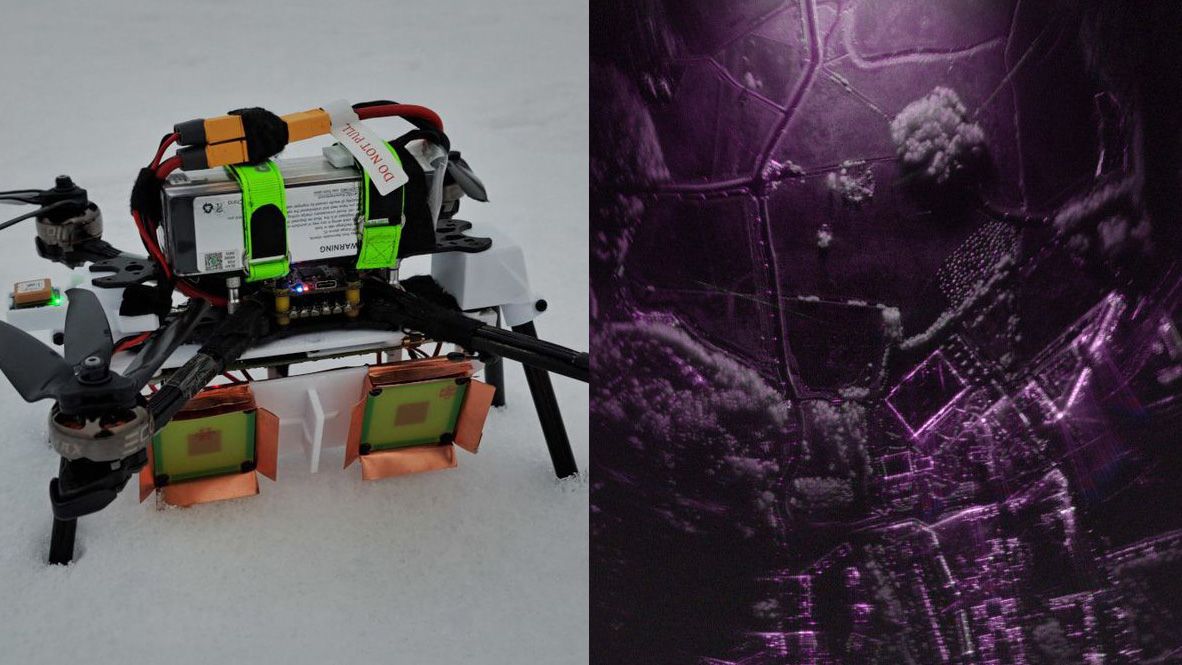
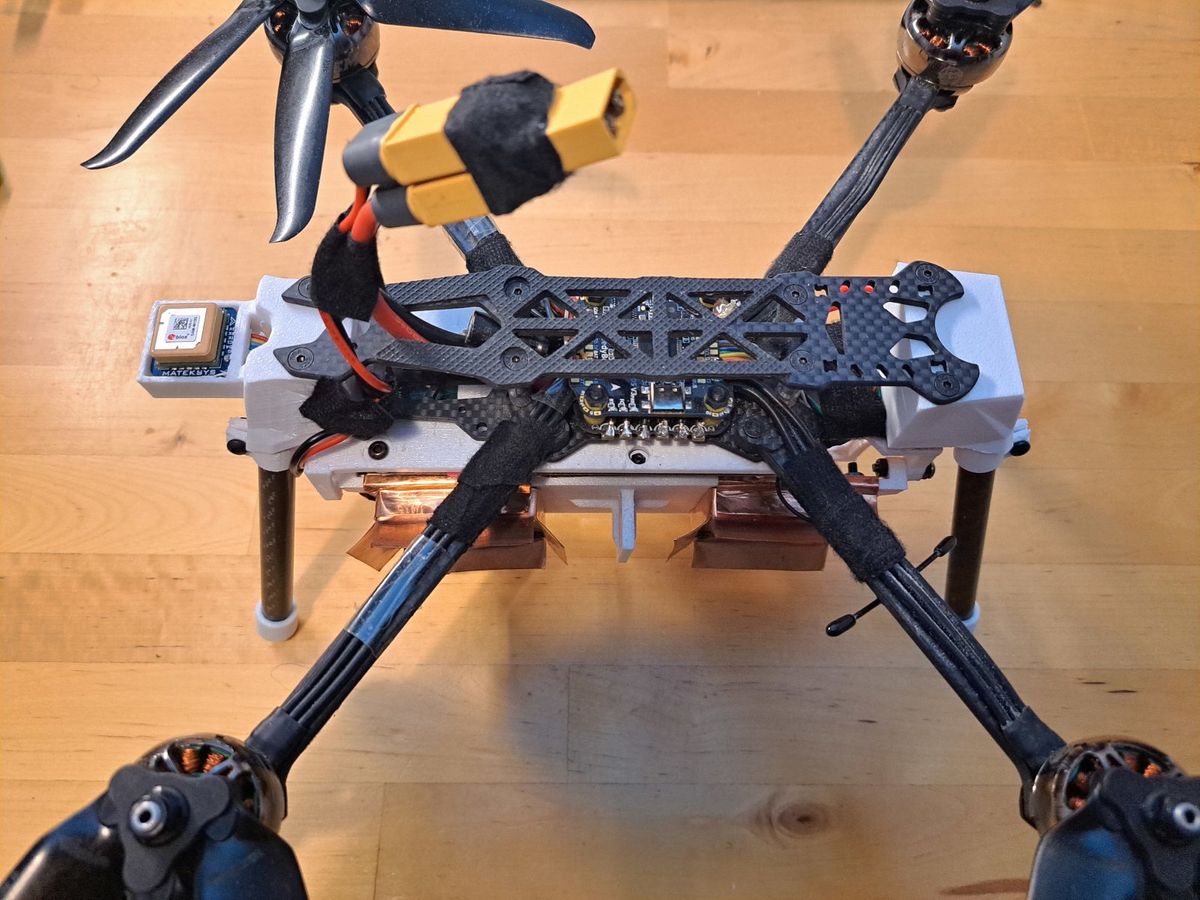
ドローンを組み立てるとこんな感じ。着陸用の脚があるほか、底面にはレーダーが裏向きで取り付けられています。
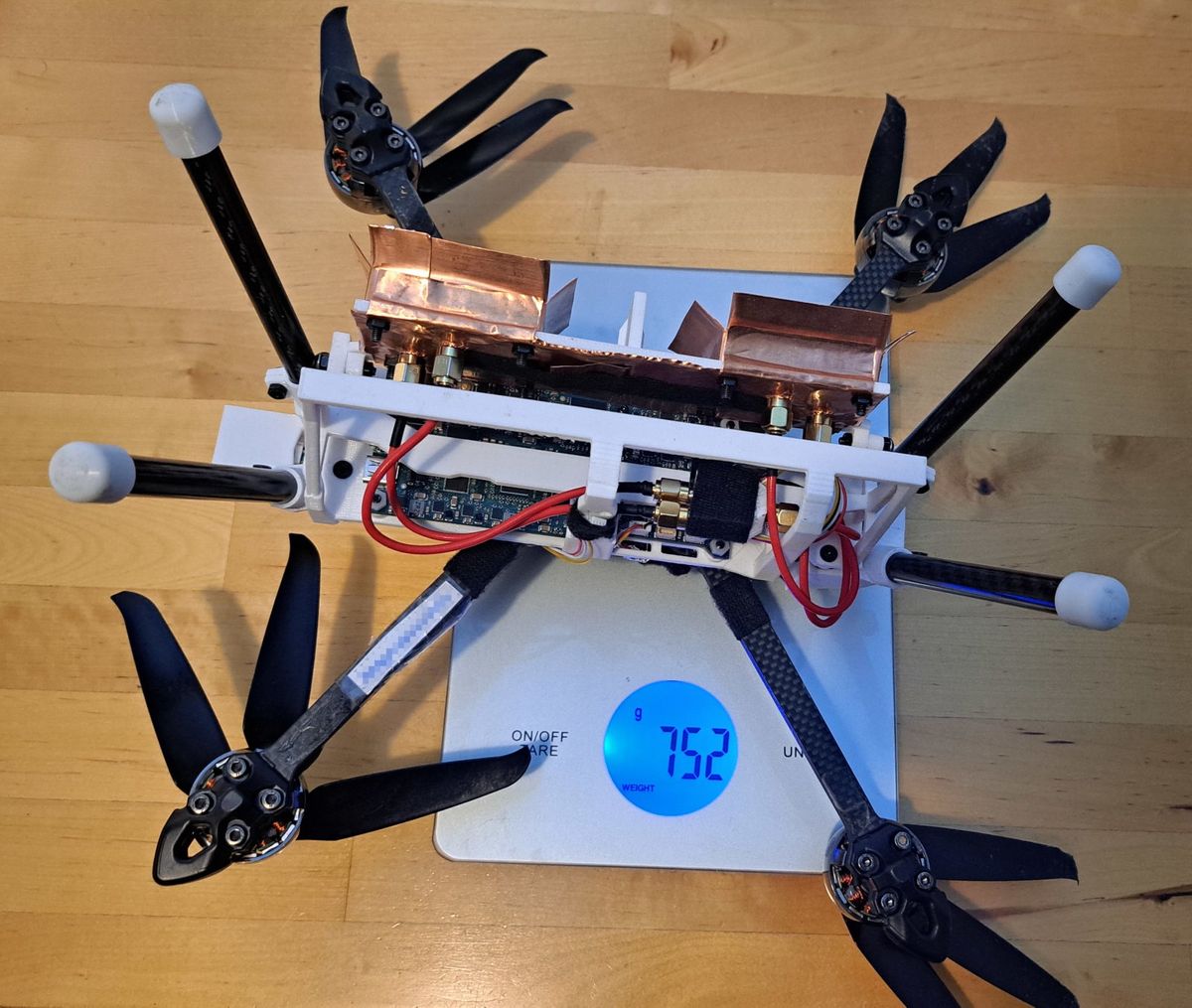
バッテリーなしの重量はわずか752gで、小型の容量1300mAhのバッテリーを取り付けても948gで収まるとのこと。
そしてフォルステン氏は、ArduPilotで事前にドローンの飛行経路をプログラミングし、実際にドローンによる合成開口レーダーの観測を行いました。飛行中のドローンはこんな感じ。

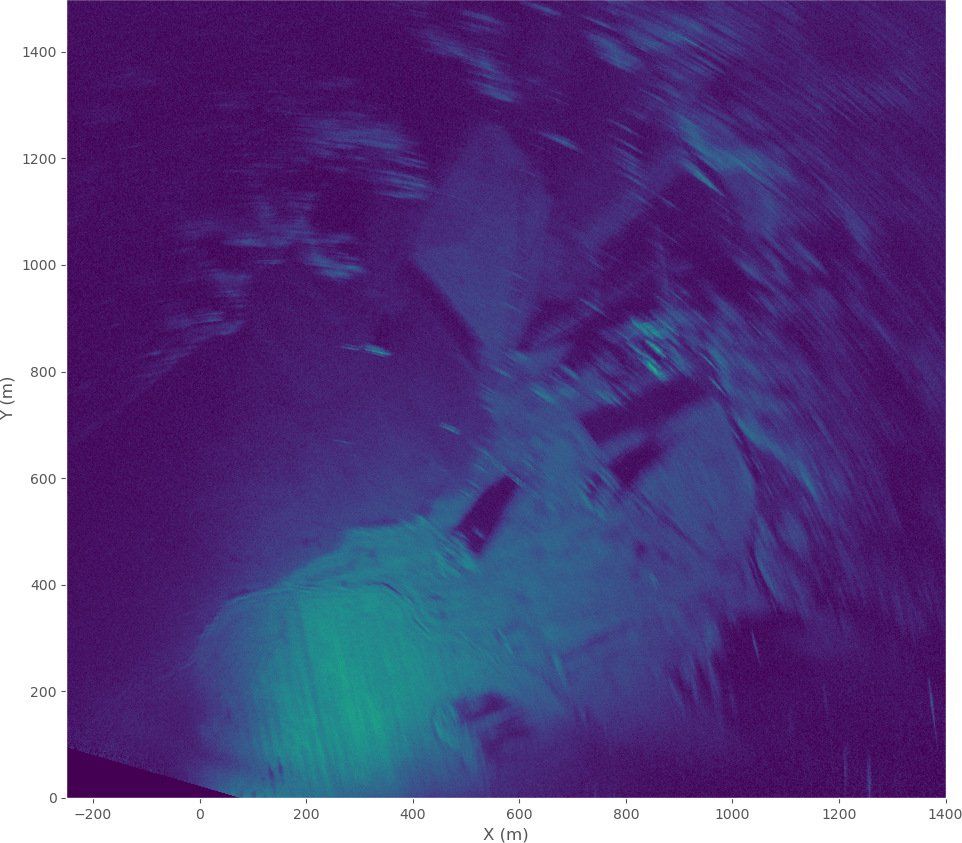
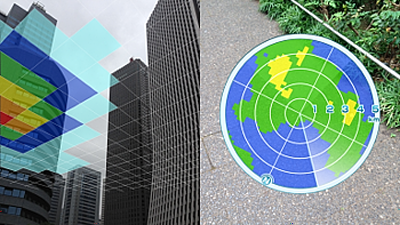
レーダーのオートフォーカスがない状態で撮影すると、以下のような合成開口レーダー画像が得られました。撮影範囲はおおよそ1.5km四方で、ぼんやりと地理的特徴が把握できますが、まだ全体がぼやけています。
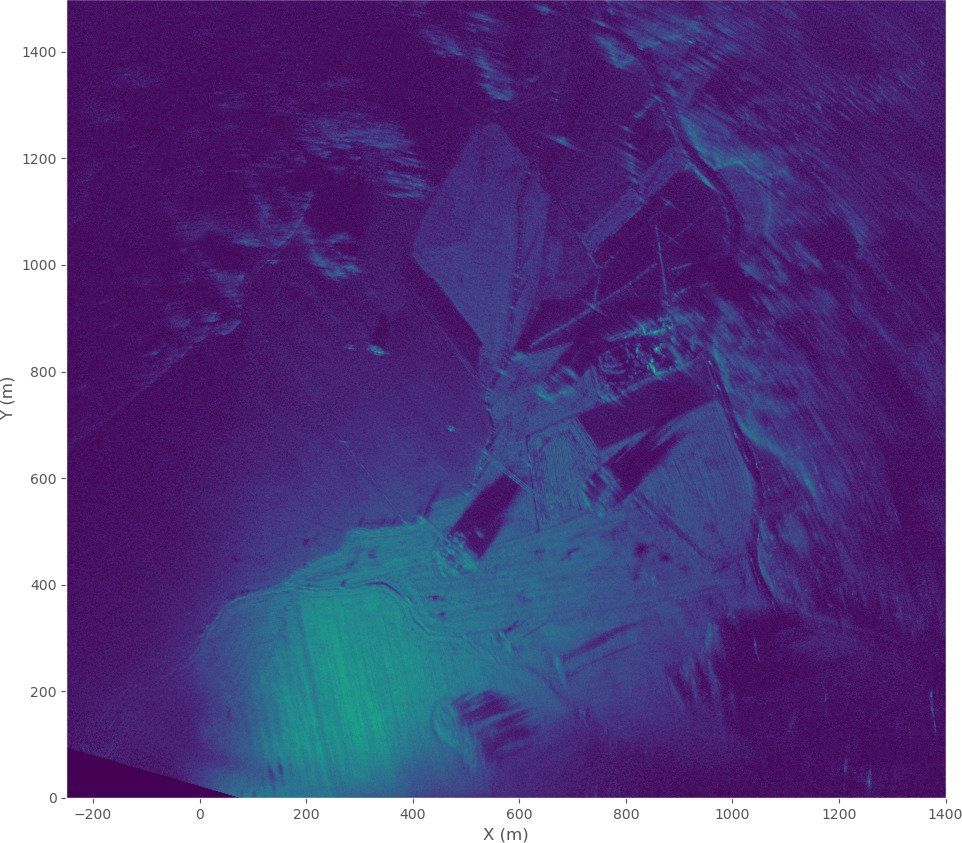
フォルステン氏が自ら改善したオートフォーカスアルゴリズムを用いてデータの修正を行うと、かなり高解像度の画像を得ることができました。
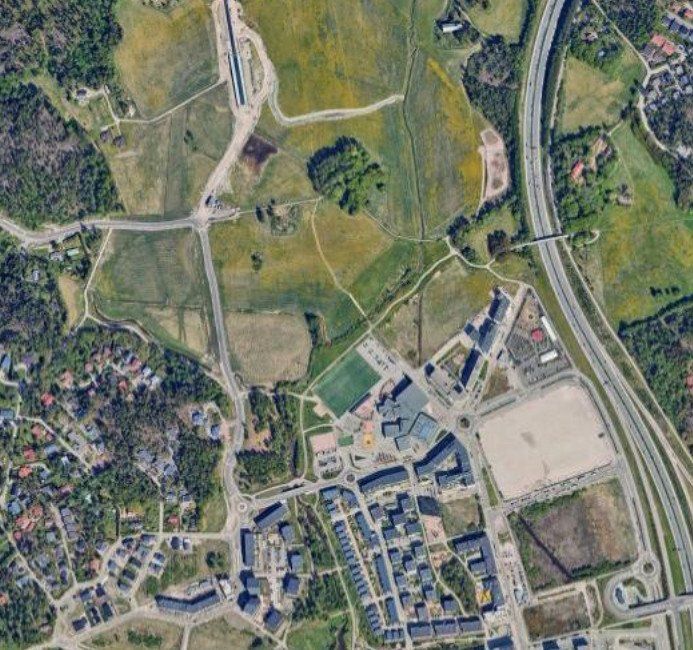
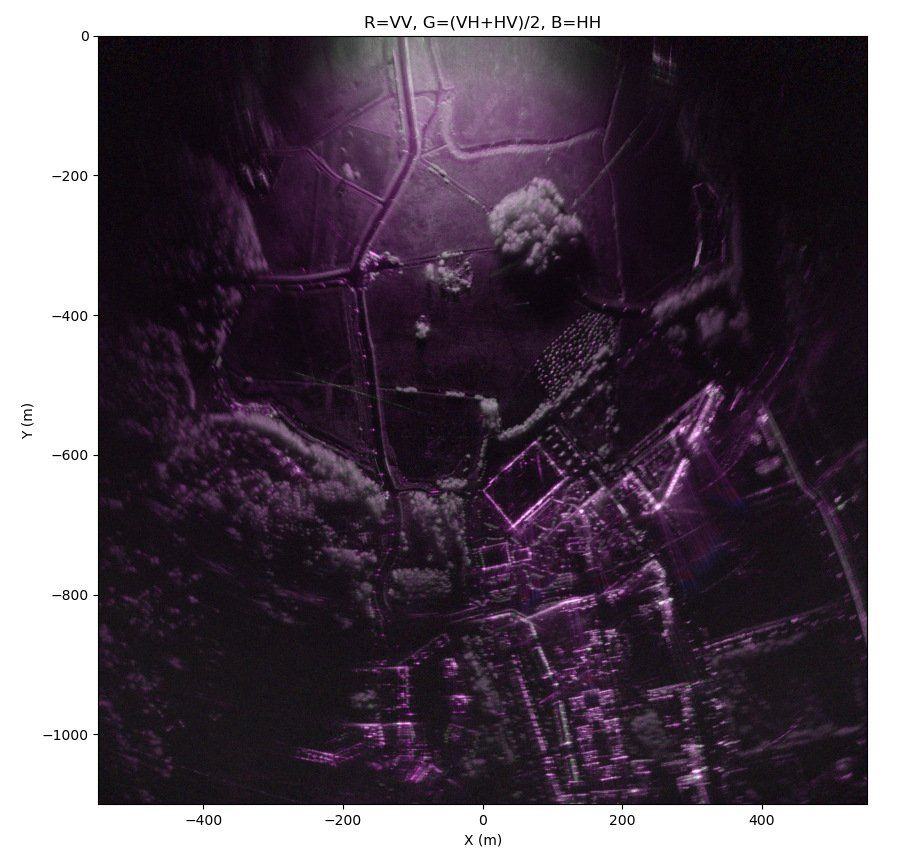
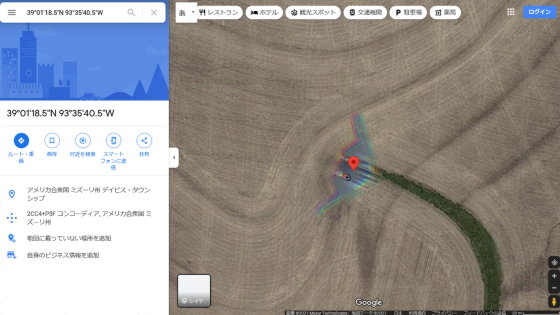
さらにフォルステン氏は、レーダーが扱える4種類の偏波「VV(垂直偏波を送信して垂直で受信する)」「VH(垂直偏波を送信して水平で受信する)」「HV(水平偏波を送信して垂直で受信する)」「HH(水平偏波を送信して水平で受信する)」すべてを利用して観測を行いました。以下は、観測する場所の航空画像。
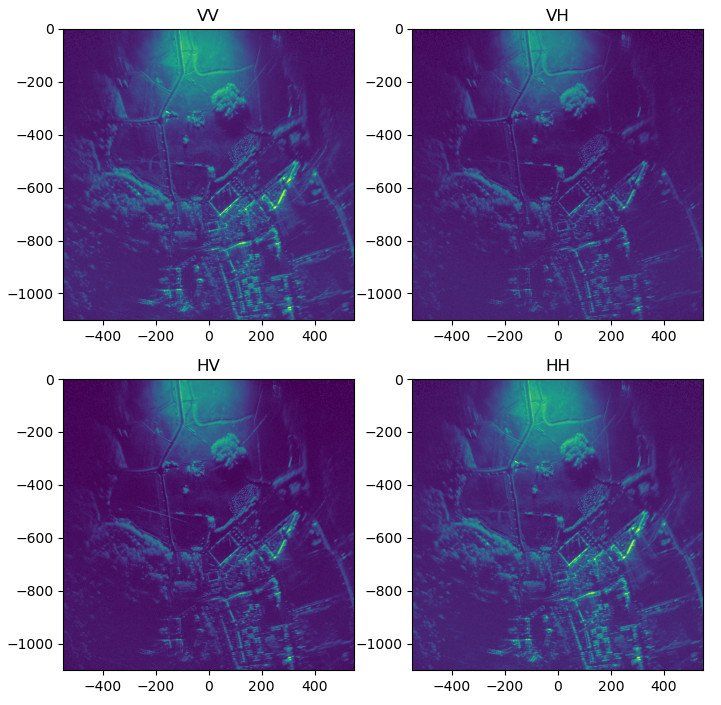
同じ場所を「VV」「VH」「HV」「HH」の4つの偏波で撮影した画像が以下。
4つの偏波データを重ね合わせ、1つの画像にするとこんな感じ。かなり精度の高い画像が得られました。
フォルステン氏によると、今回のプロジェクトのコストはドローン本体で約200ユーロ(約3万2000円)、レーダー2台あわせて600ユーロ(約9万6000円)ほどだそうで、本業が終わった後に10カ月間作業したとのこと。「コストの低さを考えると、システムのパフォーマンスには満足しています」とフォルステン氏は述べました。
・関連記事
ESP32でドローンを自作するガイド、スマホでちゃんと操作可能 - GIGAZINE
チープな「手作りのドローン」がなぜ各国の軍隊の脅威となっているのか? - GIGAZINE
54個のローターで人間を乗せて飛ぶ自作ドローン「The Swarm」 - GIGAZINE
火炎放射器付きドローンを自作してクリスマス用に七面鳥の丸焼きを調理 - GIGAZINE
たった4000円で自動運転技術の肝となる「LIDAR」を自作 - GIGAZINE
「深紅の湖」や「ロシアの謎の波紋」などNASAの衛星が激写した地球の絶景12選 - GIGAZINE
衛星画像から見た世界の平均的な「色」とは? - GIGAZINE
・関連コンテンツ




in ハードウェア, サイエンス, Posted by log1h_ik
You can read the machine translated English article A man who made his own drone equipped wi….