




自動運転車の世界を引っ張る優秀な頭脳は軒並み「DARPAコンテスト」の卒業生

かつては「夢の乗りもの」とされ、実現までに膨大な時間がかかると思われてきた自律運転車両は2010年代に入って急激な進歩を遂げ、2020年ごろには実際に街の中を走り出すと期待されています。その原動力となっているのがAIをはじめとするコンピューター技術の進歩なのですが、さらにその背景には2000年代前半に行われていたDARPA(アメリカ国防高等研究計画局)による軍事技術開発の競争が存在しています。
The PayPal Mafia of Self-Driving Cars Has Been at It a Decade - Bloomberg
https://www.bloomberg.com/news/features/2017-10-30/it-s-been-10-years-since-robots-proved-they-could-drive
自律運転車両そのものの構想は決して新しいものではなく、自動車が普及し始めた頃から誰もが考えるアイデアでした。しかし、実際に人間が目で見て、耳で聞いた情報を処理して判断を下して操作する、という一連の動作をはたしてどのようにしてコンピューターに担わせるのか、その技術の開発には高い壁が立ちはだかり、実際に形にできる者は現れないままの時代が続きました。
その開発を大きく進めることになったのが、2001年から始まったアフガニスタン紛争だったとのこと。2001年にニューヨークのワールド・トレード・センタービルに旅客機が衝突するという衝撃的な光景を忘れることができないアメリカ同時多発テロ事件が起こり、その首謀者であるウサーマ・ビン・ラーディン氏の引き渡しをタリバーン政権が拒否したことを受けて、アメリカが主導する有志連合諸国および北部同盟がアフガニスタンに軍を送り込んで戦闘を繰り広げてきたのですが、戦地ではありとあらゆる場所に埋められた地雷によって多くの兵士の命が奪われてきました。一説では「アメリカ軍は特に兵士の命が奪われることを嫌う」と言われており、次々と兵士の命が奪われることを防ぐためにアメリカが目指したのが「自律運転車両の開発」という目標でした。誰も乗っていない車両を自動で走らせることで、誤って地雷を踏んで車両が爆破されたとしても、人命だけは守ることができるという狙いです。

By Todd Huffman
こうして2004年に始まったのが、DARPAによるロボットカーレース「DARPAグランド・チャレンジ」でした。2004年の第1回目と2005年の第2回目の大会は、モハーヴェ砂漠に設定された総距離およそ150マイル (約240km)のコースを走破するというものでしたが、2004年大会では完走者なし。それどころか、最も長く走れたカーネギー・メロン大学チームでさえ、総走行距離はわずか「11.78km」というものでした。
余談ですが、DARPAは「国家の安全を促進するためのブレークスルー技術のカギとなる投資を行う」ことをミッションに掲げており、今では誰もが使っているGPSや、インターネットの先祖もDARPAによって生みだされたもの。ロボット技術の開発もDARPAが力を入れている分野の1つです。
話は戻り、2004年の大会で、走行距離11.78kmという「最長記録」をたたき出したのが、カーネギー・メロン大学のチーム「レッドチーム」が用いた「サンドストーム」と呼ばれる車両。軍用車両「ハンヴィー」をベースにした車両で、ただでさえ頑丈なハンヴィーの車体に強固な保護バーを追加し、車両の上にはおびただしい数のセンサー類がスプリングに乗せられたフローティング状態で搭載されています。よく見れば、ボディーのあちこちがヘコむなど多くのダメージを受けていることがわかります。

翌年の2005年大会では、各チームともめざましい進歩を遂げます。決勝に進んだ23台全てが前年の「11.78km」よりも長い距離を走行し、5台が150kmのコースを完走。この時の優勝チームは、スタンフォード大学の「スタンフォード・レーシング・チーム」で、「スタンレー」と呼ばれる車両が6時間54分でゴール。スタンフォード大学のサンドストームは7時間5分でゴールしており、僅差の結果だったことがわかります。
2年後の2007年に開催された第3回大会「2007アーバンチャレンジ」ではコースを変え、軍の敷地内に市街地を想定して建てられた総延長96kmのコースを6時間以内に完走することが求められました。その際には、他の車列や障害物に対応したり車列に合流しながら、すべての交通規則に従う事や、歩行者に見立てた人形が飛び出すので、激突せずによけることができるかということも審査のポイントとなっています。
この大会は多くの注目を集め、Googleのラリー・ペイジ氏もプライベートジェットに乗って駆けつけたほど。しかし、レースそのものは混迷を極め、まともにスタートできないチームが続出するほどだったとのこと。最大の原因はコースサイドに設置された巨大なディスプレイがGPSの電波を妨害していたことだとわかり、対策をとるとすぐに各チームとも正常に戻ったのですが、事前にコースの情報がほとんど与えられていない中でのレースということで、手探り状態でレースが進みます。当時撮影された以下の映像では、その一端を垣間見ることができます。
DARPA Urban Challenge (2007) - YouTube

結果、優勝者はカーネギー・メロン大学「タータン・レーシング」が作成したシボレー・タホベースの車両「Boss」でした。同チームでソフトウェアを担当したブライアン・サレスキー氏は当時を振り返り、「DARPAは誰にもズルを許さず、コース全体を見渡せる方法はありませんでした。6時間にわたり、だれも何が起こっているのかを把握できません。私はずっと胃に穴があくようで、『頼むから、頼むからちゃんと戻ってきてくれ』と祈るような気持ちでした」と語っています。サレスキー氏はその後、Googleを経て自律運転車を開発する企業「Argo」へと移り、自動車企業のフォードから10億ドル(約1130億円)の出資を得るに至っています。
2007年の大会は、その後の発展につながる大きなターニングポイントとなったという意味で大きな意義を持つものとなっています。元DARPA長官のアンソニー・テザー氏は、ライト兄弟による世界初の飛行機を例にして、「最初の2回の大会は、ノースカロライナ州キティーホークで最初に飛行機が空を飛んだ瞬間のようなものでした。しかし、2007年の大会は、リンドバーグが『スピリット・オブ・セントルイス』でニューヨークからパリまで飛行した時のようなもので、初めて『これはビジネスになる』と人々が思い始めた瞬間でした」と、その瞬間の意味を振り返っています。そして、Googleが資金をつぎ込んで自律運転車両の開発に乗り出したのも、このタイミングでした。
それまで、自律運転車両の実現は「2030年から2040年ごろ」ともいわれていたのですが、その時期は急速に早められることになります。その原動力となったのが、大会に参加していた各チームから巣立った才能を持つ人々です。自律運転車両の開発は「DARPAチャレンジの同窓生」によって進められることになり、スタンフォード大学出身で、2014年に「Zoox」を起業するJesse Levinson氏や、カーネギー・メロン大学チームのKevin Peterson氏、後に「Waymo」へとつながるGoogleの開発チームには、Mike Montemerlo氏やChris Urmson氏、前述のSalesky氏のほか、「Otto」を設立した直後にUberに買収され、Googleと知的所有権をめぐって訴訟の渦中にあるAnthony Levandowski氏など、この分野におけるキーパーソンがそろい踏みの状態となっています。
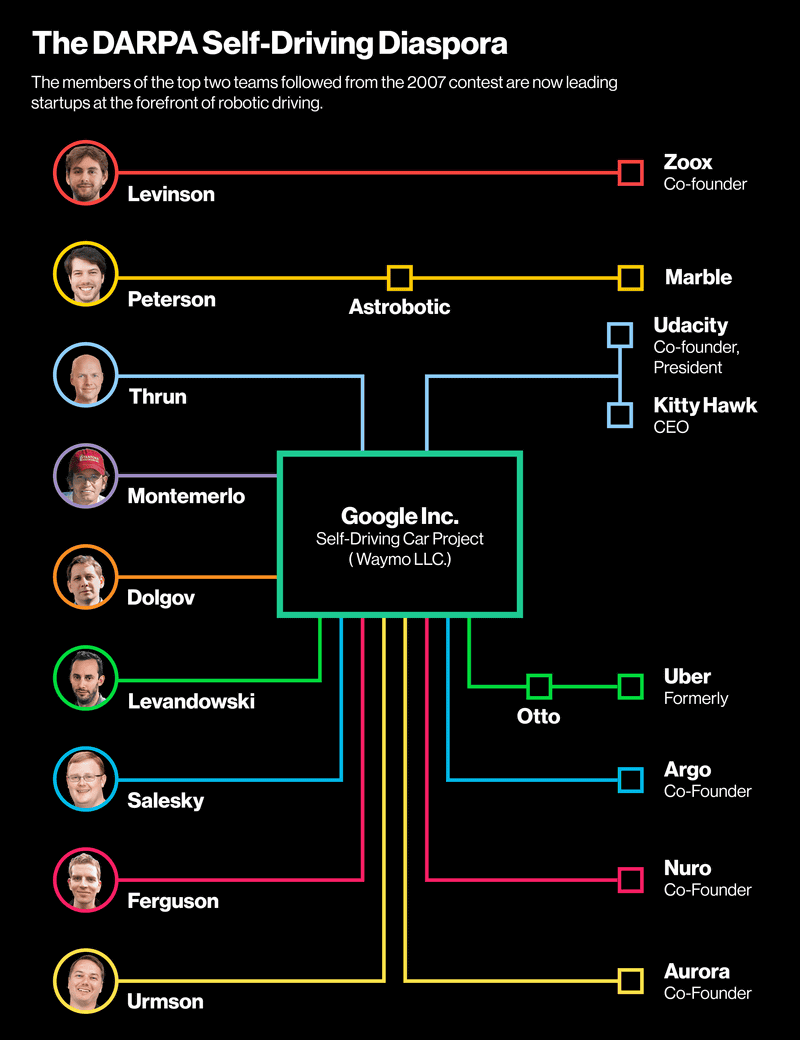
その様子は、イーロン・マスク氏を筆頭とするPayPalが輩出した天才企業家集団ペイパルマフィアの自律運転車両バージョンともいわれるほど。かつて才能を競った大学のチームが今度は企業となってさらに技術に磨きをかける状況の中から、最初に完全自律運転車両を実現するのが誰になるのか、興味深い開発競争が続きます。

・関連記事
Appleが開発する自動運転車ユニットが激写されその狙いが明らかに - GIGAZINE
GoogleのWaymoのハンドルもペダルもない自動運転車「Firefly」の開発が終了へ - GIGAZINE
自動運転車に不可欠のLIDARシステムを1チップ化しコストの99%を削減できるStrobeをGMが買収 - GIGAZINE
フォードが雪道で自動運転車の試験走行を実施、今後はGoogleとの共同開発も視野に - GIGAZINE
97歳のおじいちゃんが孫のテスラ製自動運転車で初ドライブし「これは未来だ!」と驚く動画が大人気に - GIGAZINE
交通事故の衝突時にやわらかくなって通行人のダメージを減らす自動運転車特許をGoogleのWaymoが取得 - GIGAZINE
「100%自動運転車には乗りたくない」という人がまだ全体の半分以上いることが調査で判明 - GIGAZINE
「ドライバー要らずの自動運転車はインドで走らせない」とインドの交通大臣が発言 - GIGAZINE
・関連コンテンツ








in 動画, ハードウェア, サイエンス, 乗り物, Posted by darkhorse_log
You can read the machine translated English article An excellent brain that pulls the world ….