四足歩行の猿型ロボット「iStruct」がドイツで開発される
「より自然に近い形の足があればさまざまな方法で立つことが可能なはず」ということで、人工知能について研究するドイツリサーチセンター(DFKI)が手足にさまざまなセンサーを取り付けた四速歩行の猿型ロボットを開発しました。
iStruct Demonstrator < Robot Systems- Robotics Innovation Center - DFKI GmbH
http://robotik.dfki-bremen.de/en/research/robot-systems/istruct-demonstrator-1.html
実際に猿型ロボットが歩いている様子は以下のムービーから見ることができます。
iStruct - Walking - YouTube
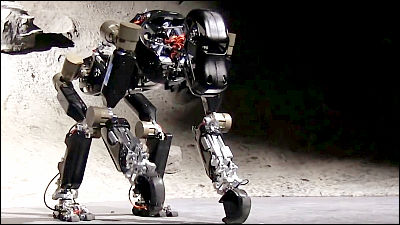
コレが猿型ロボット「iStruct」。大きさは66cm×43cm×75cmで、重量は18kgです。
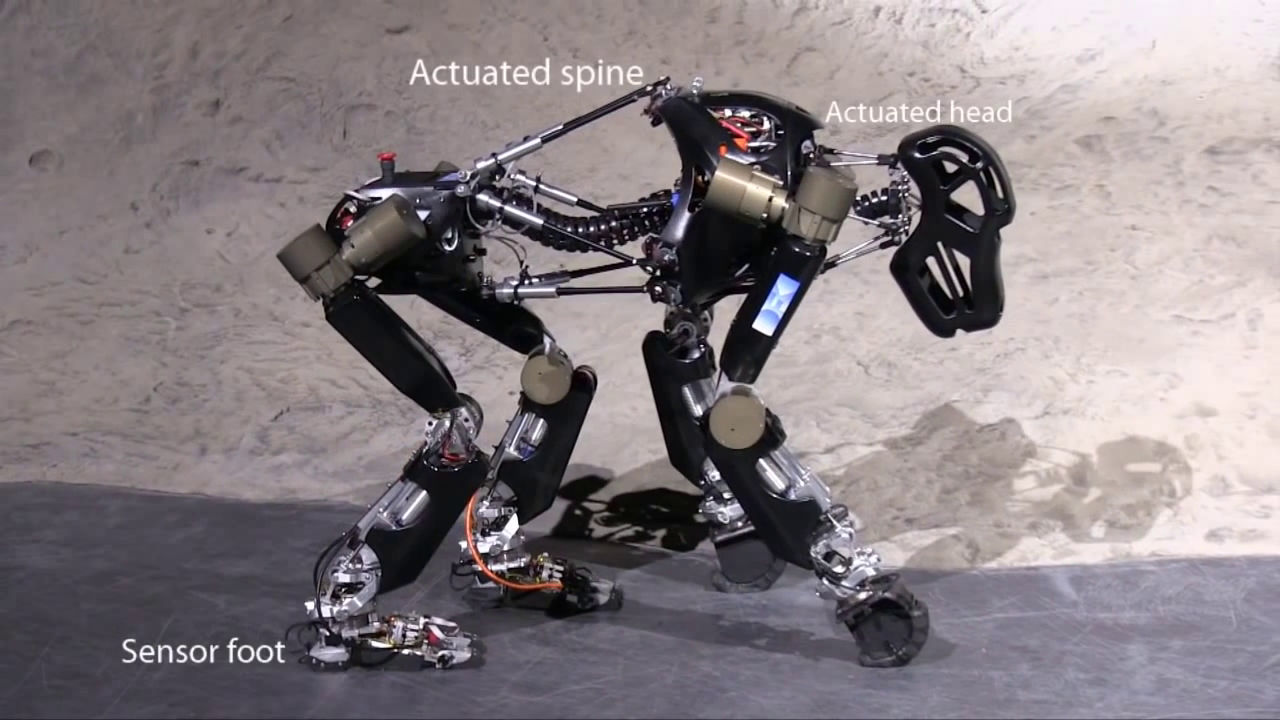
現在あるロボットの多くは足の複数のポイントを使って地面を歩くようには作られていませんが、より自然に近い足の形にすれば地面にさまざまな方法で立つことが可能になり、ロボットの機動性は著しく改善されるはず、ということでiStructは開発されました。

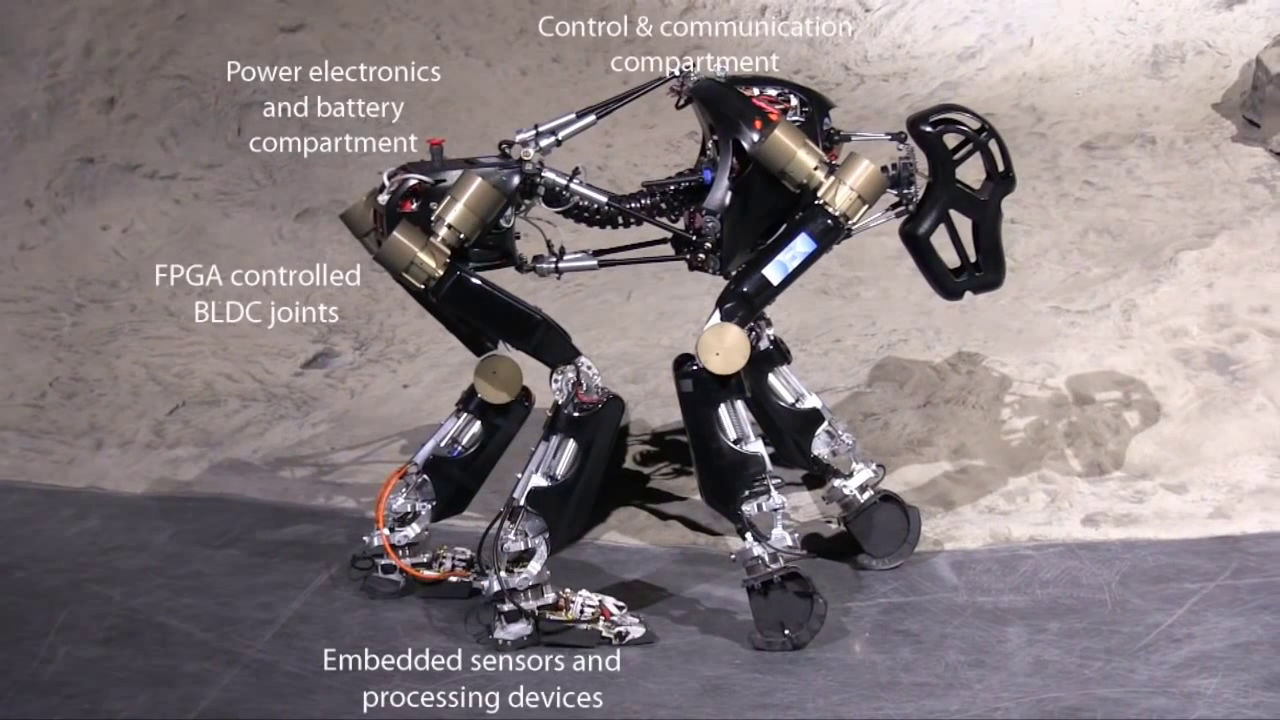
手足をきっちりと接地させるため、身体にはさまざまなセンサーが取り付けてあります。
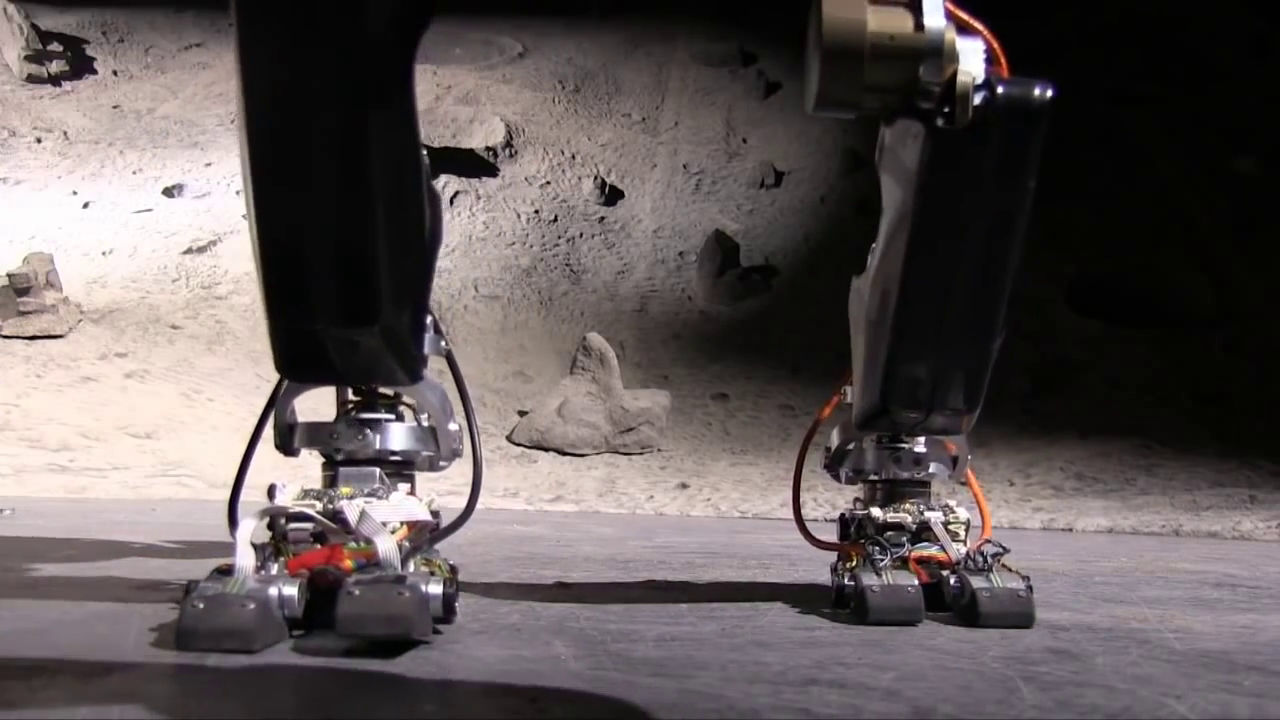
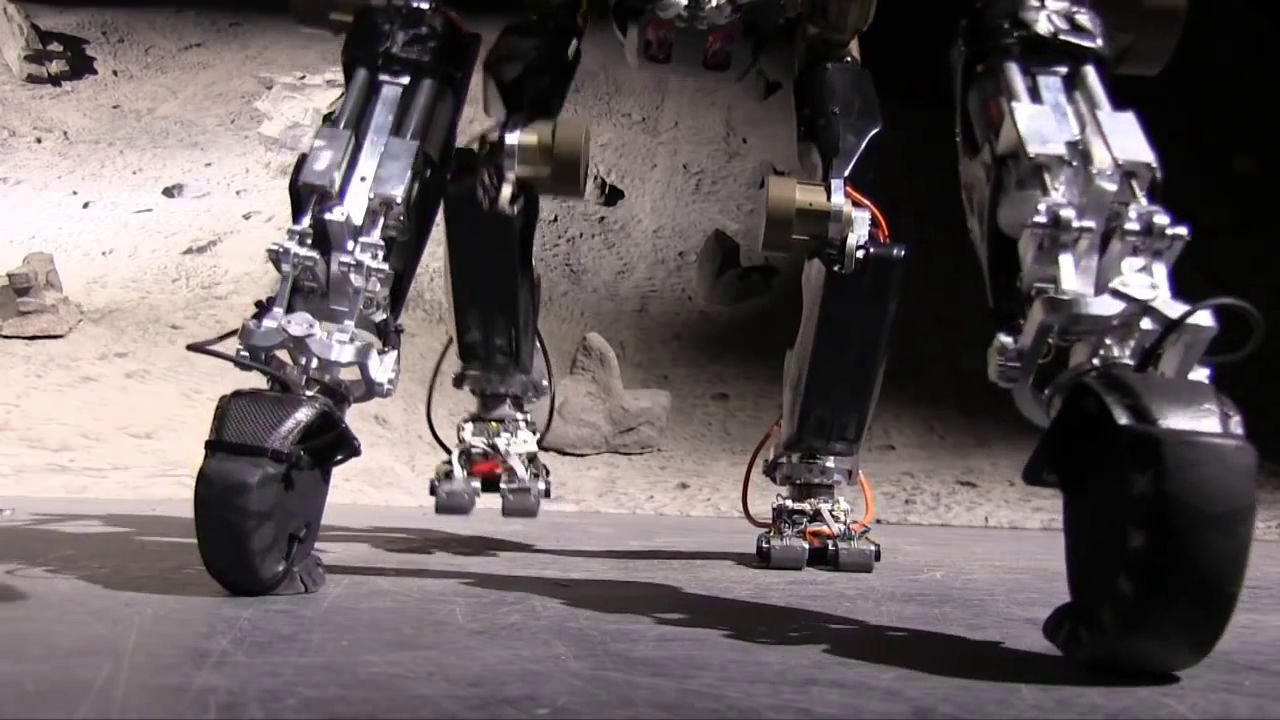
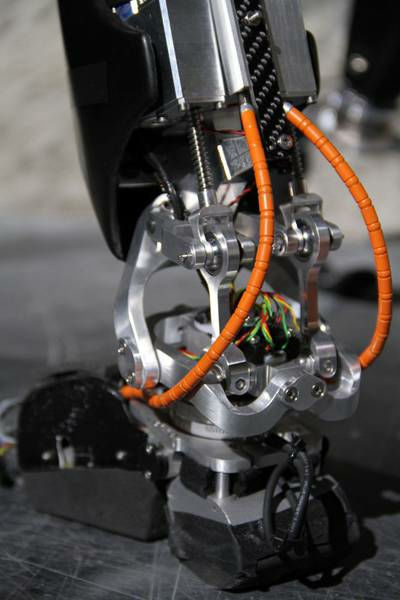
足には49個の圧力センサー、3つの軸加速センサー、距離センサー1つ、位置センサー3つなどがあり、圧力センサーはロボットがどのように移動しているかを検知し、近接センサーを使って適切に歩き何かに衝突しないようにします。また、温度と加速度センサーなども組み込まれているとのこと。2本の後ろ足は3点のポイント、かかとと2点のつま先を使って移動します。
一方手に関しては、曲線を描いた大きなブロックを使用しており、動いているときでもバランスを保つ仕組み。
ジョイントには位置・速度・流動・供給電圧・温度などのセンサーが取り付けられています。
胴体には慣性計測装置やバッテリー。

リアルタイムで重心を変えていくため、傾斜の上に置いても自分でバランスをとることが可能。バランスを取る様子は以下のムービーから確認できます。
iStruct - Balancing - YouTube
これは宇宙ロボットの研究の一環であり、iStructはロボットが動き回るためのよりよい方法を開発するために作られました。なお、このプロジェクトは2013年8月に終了する予定で、iStructが実際に宇宙に行くことはないようです。
・関連記事
「俺の嫁が画面から出てくる」ARロボット開発キットで嫁を愛でるとこんな感じ - GIGAZINE
「乗れるロボット」が現実に、全長4mの鉄製ロボットが制作進行中 - GIGAZINE
人が乗れる巨大ロボ「クラタス」を実際に動かしたお披露目の様子のムービーはこんな感じ、価格も判明 - GIGAZINE
実際に自分で乗り込んで操縦できる多脚歩行ロボット「Mantis」 - GIGAZINE
人が乗ることができるオープンソースの巨大多脚ロボ「Stompy」 - GIGAZINE
・関連コンテンツ