A quadruped walking monkey robot "iStruct" will be developed in Germany
"It should be possible to stand in a variety of ways if there is a more natural form of feet" so that the German Research Center (DFKI), which studies artificial intelligence, has developed a four-speed walking system with various sensors attached to limbs I developed a monkey robot.
iStruct Demonstrator < Robot Systems- Robotics Innovation Center - DFKI GmbH
http://robotik.dfki-bremen.de/en/research/robot-systems/istruct-demonstrator-1.html
The way the monkey robot actually walks can be seen from the following movie.
IStruct - Walking - YouTube
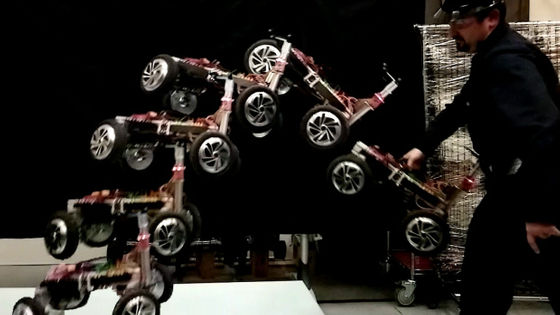
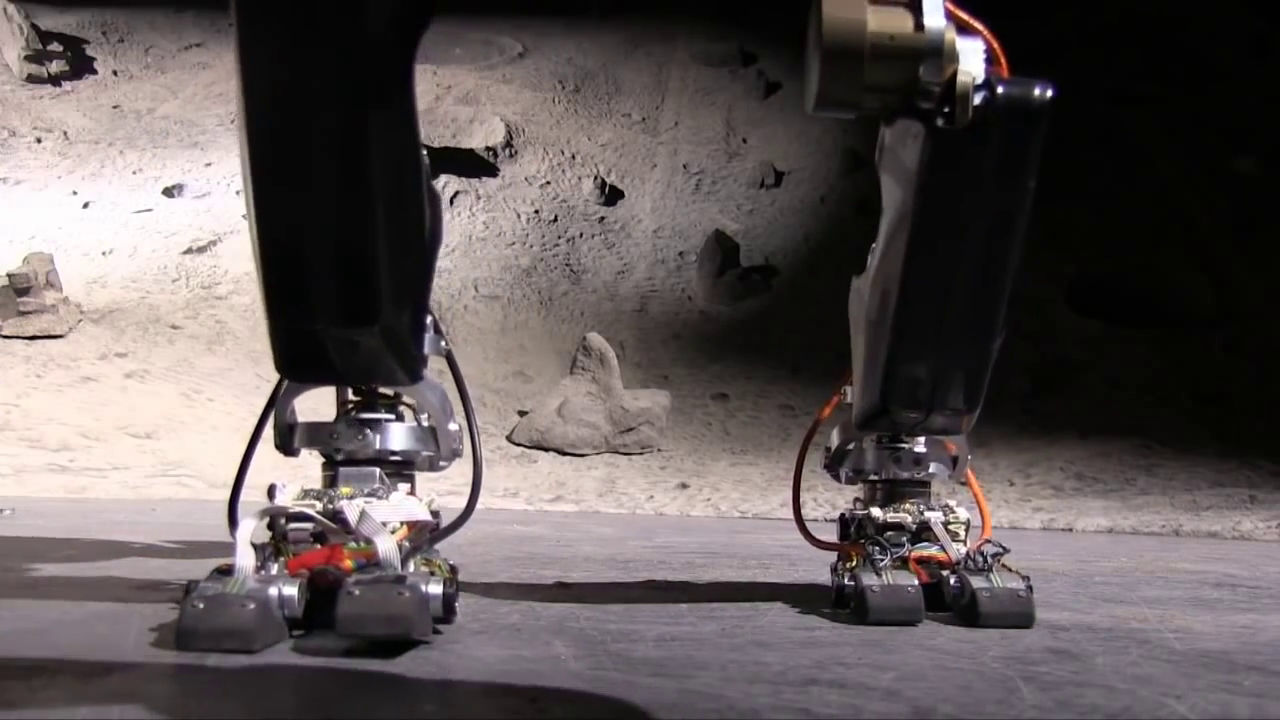
This is a monsteroid robot "iStruct". The size is 66 cm × 43 cm × 75 cm, and the weight is 18 kg.
Many of the robots that are present are not made to walk on the ground using multiple points of the foot, but if it is shaped more like a natural foot, it will be possible to stand on the ground in various ways, The mobility of the robot should be remarkably improved, so that iStruct was developed.

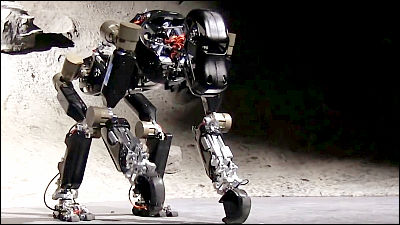
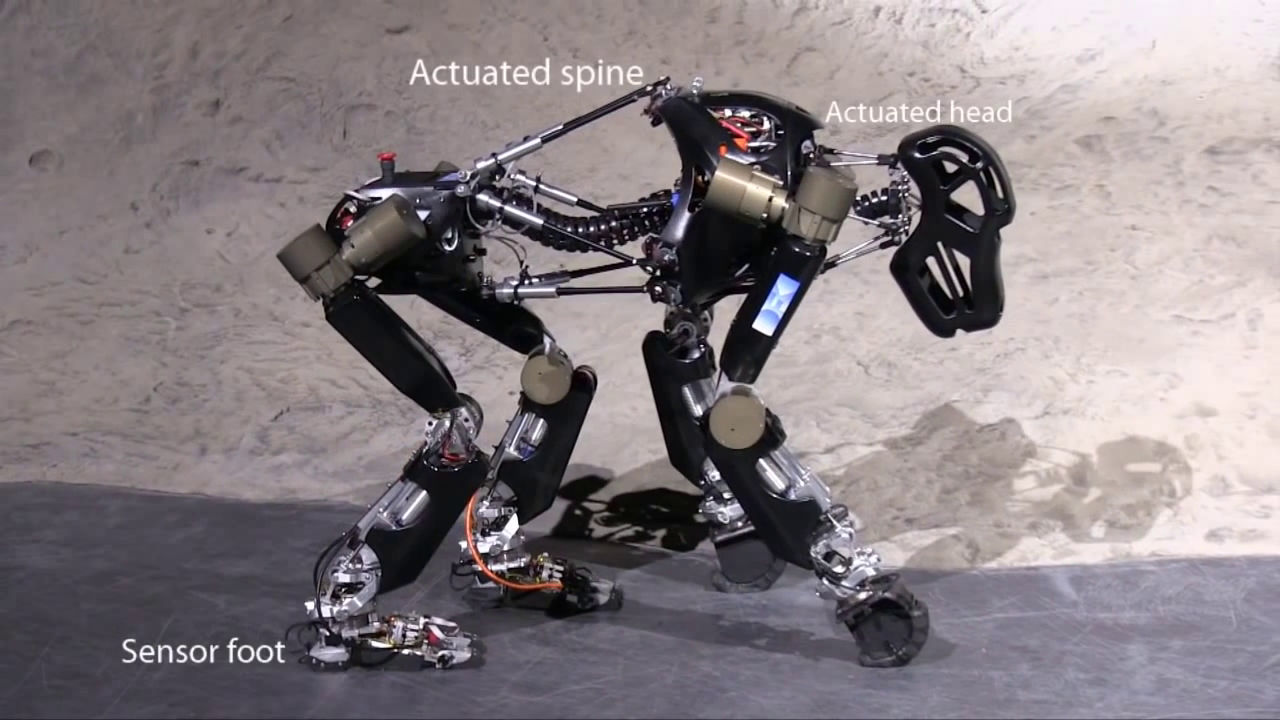
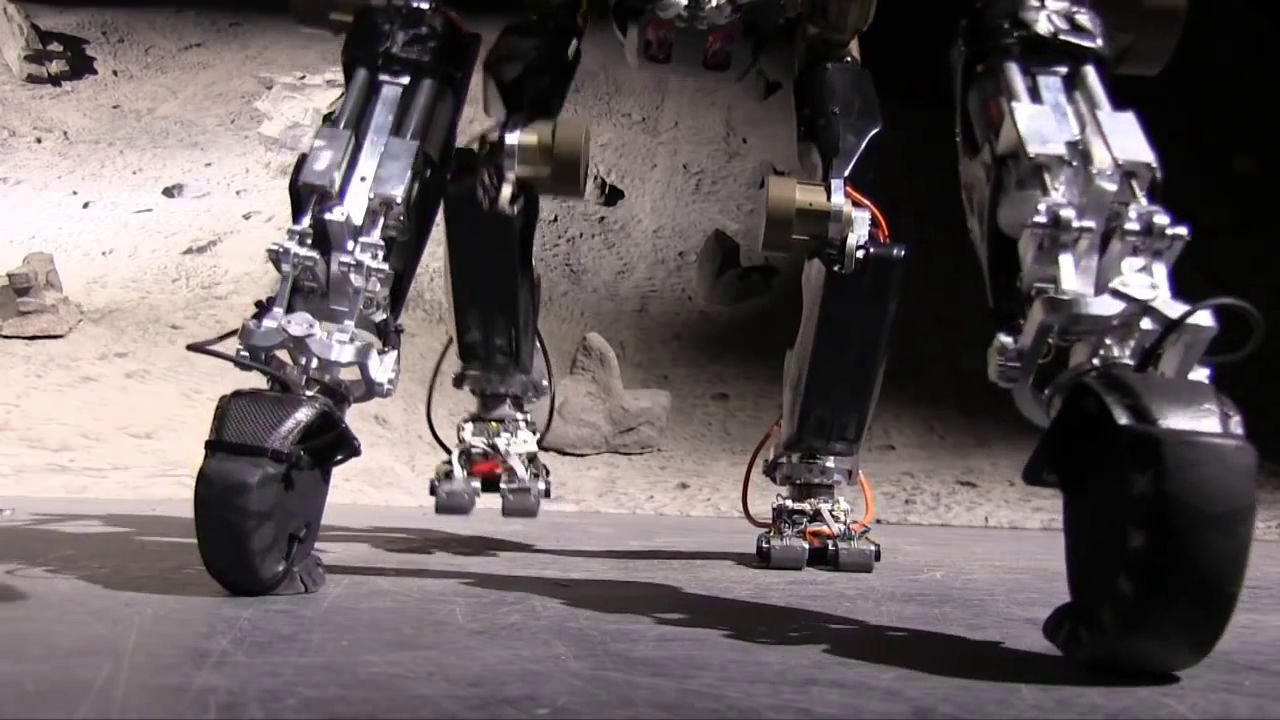
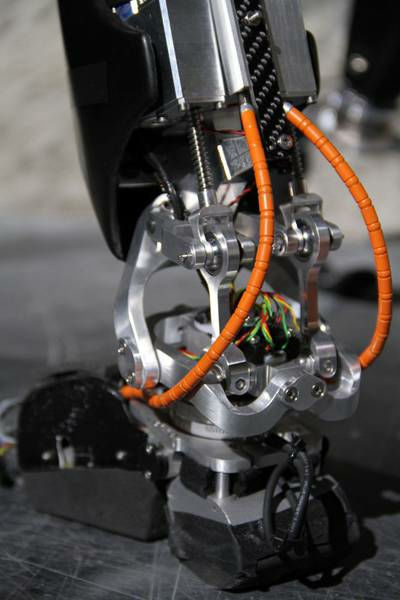
Various sensors are attached to the body so that the limbs are tightly grounded.
There are 49 pressure sensors on the foot, 3 axis acceleration sensors, 1 distance sensor, 3 position sensors, etc. The pressure sensor detects how the robot is moving and uses a proximity sensor to Walk to something so as not to collide. Also, temperature and acceleration sensor etc are built in. The two hind feet move with three points, heel and two toes.
On the other hand, as for hands, we use large blocks that draw curved lines and keep the balance even when moving.
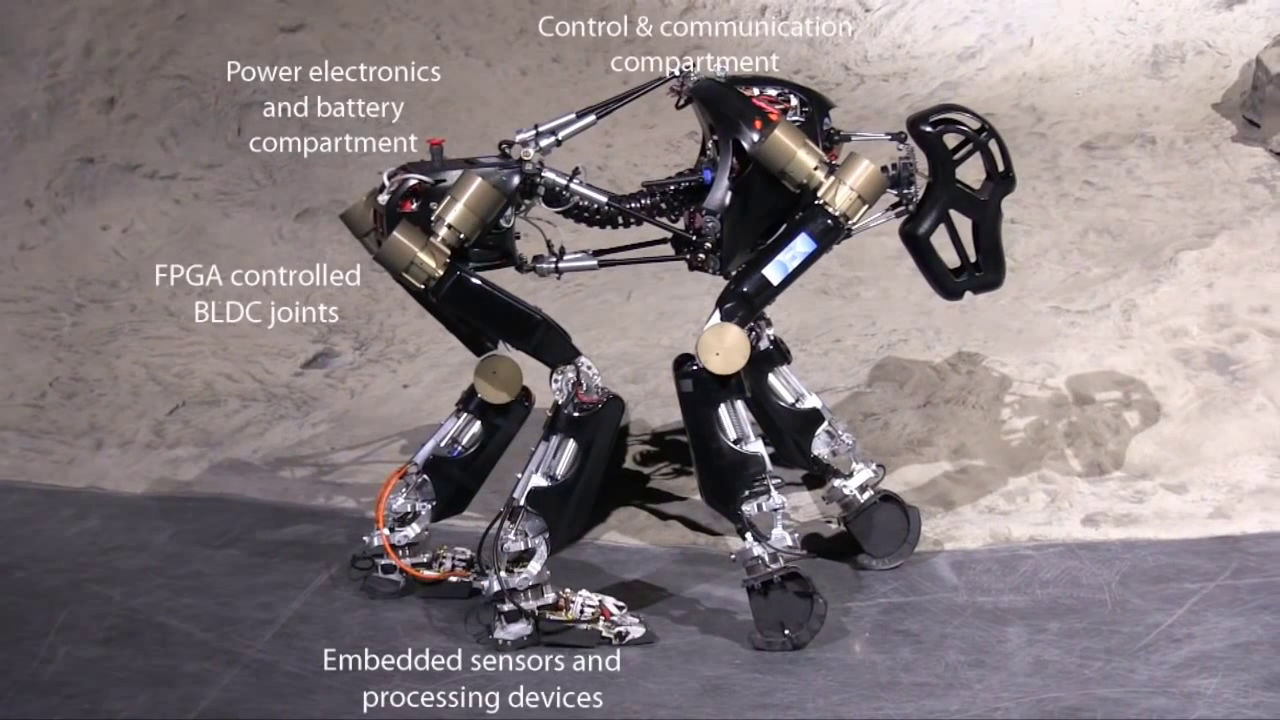
Sensors such as position, speed, flow, supply voltage, and temperature are attached to the joint.
Inertial measurement device and battery for the body.

In order to change the center of gravity in real time, even if it is placed on a slope it is possible to balance oneself. You can check the situation of balancing from the following movie.
IStruct - Balancing - YouTube
This is part of the research on space robots and iStruct was created to develop a better way for robots to move around. Please note that this project is scheduled to end in August 2013, and it seems that iStruct does not actually go to space.
Related Posts: