ぶん投げてもネコのように空中で姿勢を安定させて着地するロボットが登場
炎上中の建築物や崩壊したトンネルなど、人間にとっては危険すぎる場所の探索に有効なのがロボットです。そうしたロボットに求められる不整地踏破能力を向上させるべく、ネコのように四つん這いで着地することで落下時の衝撃を分散するという能力を持つロボットが誕生しました。
Throwable Robot Car Always Lands on Four Wheels - IEEE Spectrum
https://spectrum.ieee.org/automaton/robotics/military-robots/throwable-robot-car-always-lands-on-four-wheels
Cat-like robot lands on all fours when thrown
https://newatlas.com/robotics/agro-robot-lands-four-wheels/
アメリカ合衆国陸軍士官学校のロボティクス研究センターが開発した、ネコのように着地する能力を持つロボット「Agile Ground Robot(AGRO)」の映像が以下。
Dynamics and Aerial Attitude Control for Rapid Emergency Deployment of the Agile Ground Robot AGRO - YouTube
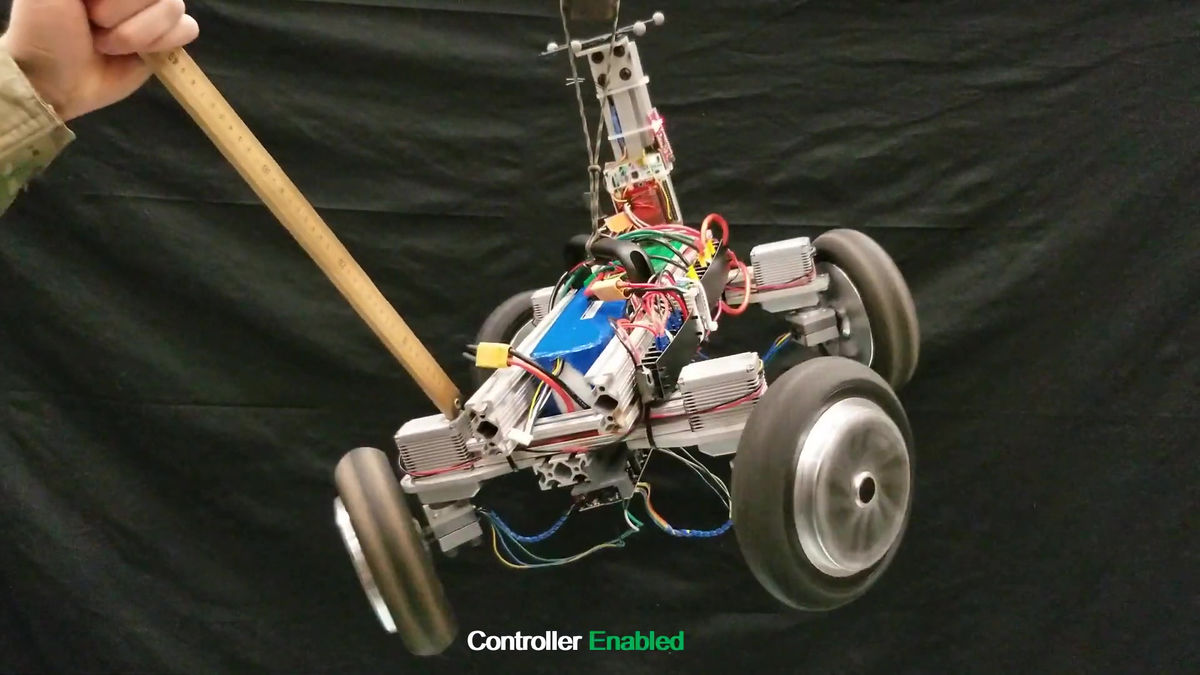
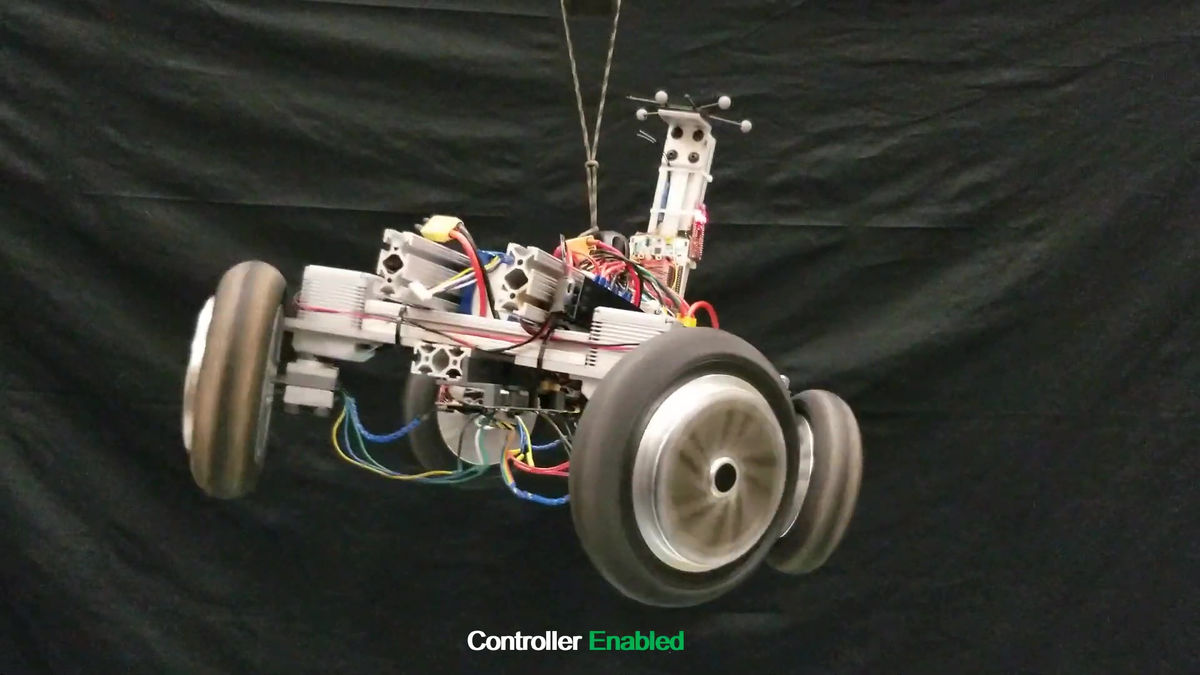
ムービーに登場するAGROは試作段階のため、内部パーツがむき出しの状態。

AGROの特徴は脚部。インホイールモーターによって、車輪の前後・左右・上下軸回転の制御が可能。車輪の向きを90度回転させることで、ほぼ直角に曲がることもできます。

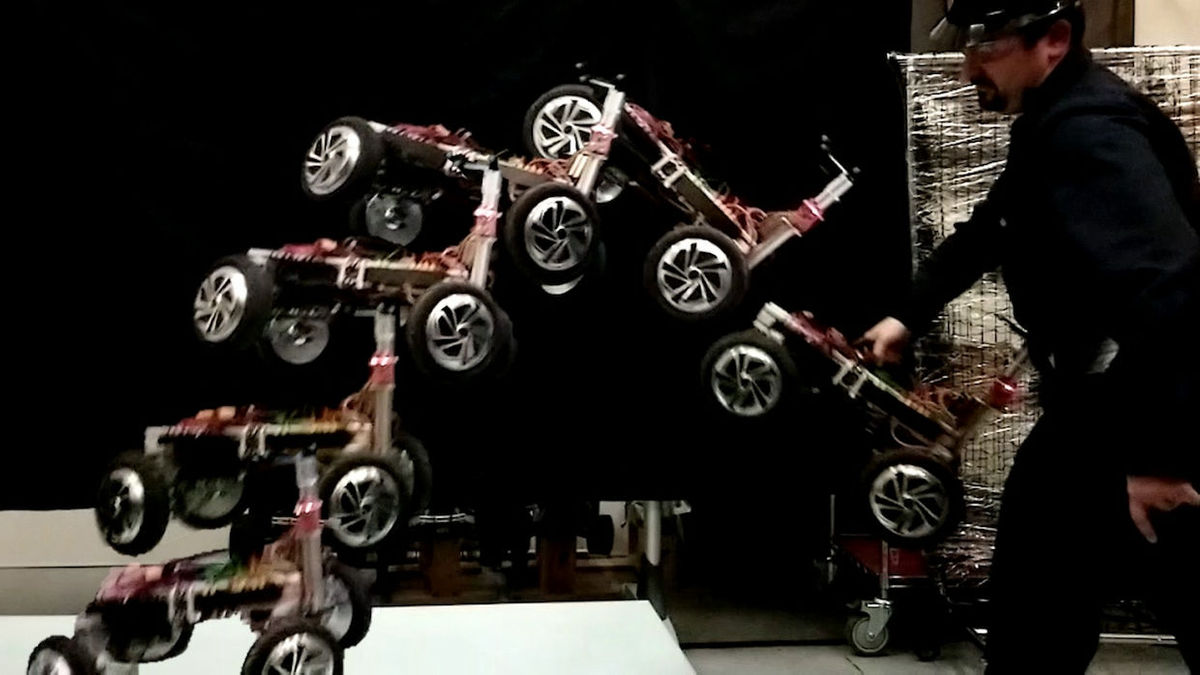
コントローラーを有効化すると、投げられて空中で車体が傾いた場合に……
内蔵された慣性計測ユニットが落下を瞬時に検出。車輪を内側に45度傾けて対角線上に位置する車輪を同方向に回転させることでトルクを生み出し、車体を水平に保とうとします。
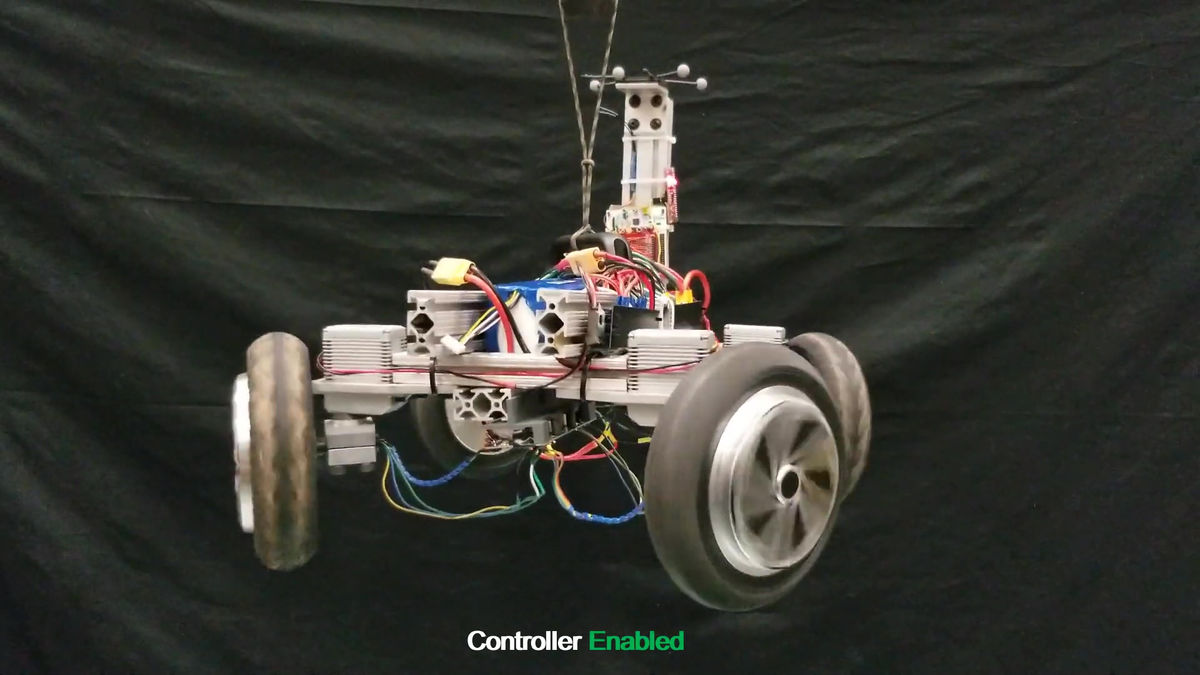
このトルクによって、AGROは四輪全てが地面に対して直角になるように着地するため、着地時の衝撃が均等に分散される上に、衝撃自体も20%減少。さらに、66rpm以内の回転速度ならば体勢を回復できるため、十分な高さがある場合には横向きや逆さ向きに落下する確率はゼロになるそうです。
AGROの論文の筆頭著者を務めたダニエル・J・ゴンザレス氏によると、理論上はAGROは250ミリ秒で22.5度の左右・前後回転が可能で、個々のホイールの角度をリアルタイムで制御すればさらなる改善を達成できるという可能性まで見えているとのこと。アメリカ電気工学技術学会の学会誌IEEE SPECTRUMは、「空中で用いられる車輪付きロボットに対して潜在的に有効」と述べて、傾斜路や段差で運用されるロボットや、航空機から落下するロボットに有用だと指摘。さらに投下中の回転を制御することでパラシュートのヒモを絡ませないようにできるとして、軍事車両を空中から投下する際にも役立つ可能性があると述べました。
・関連記事
アメリカ陸軍は1980年代に「6足歩行の巨大ロボット」を開発していた - GIGAZINE
超絶リアルに羽ばたく鳥型ロボット「BionicSwift」が登場、実際に羽ばたく様子がチェックできるムービーも - GIGAZINE
驚異のバランスで荷物を積み下ろす車輪付き物流用ロボット「Handle」で完全に無人で倉庫内作業が進むデモムービー - GIGAZINE
・関連コンテンツ