




全身のヒレを動かすことで水中を自在に動くロボット「BionicFinWave」をFestoが発表

コウモリや「バック転で逃げるクモ」など自然の生き物を驚くほどリアルにメカで再現するFestoが、新たに全身についたヒレを波のように絶え間なく動かすことで推進するロボット「BionicFinWave」を発表しました。
BionicFinWave | Festo Corporate
https://www.festo.com/group/en/cms/13252.htm
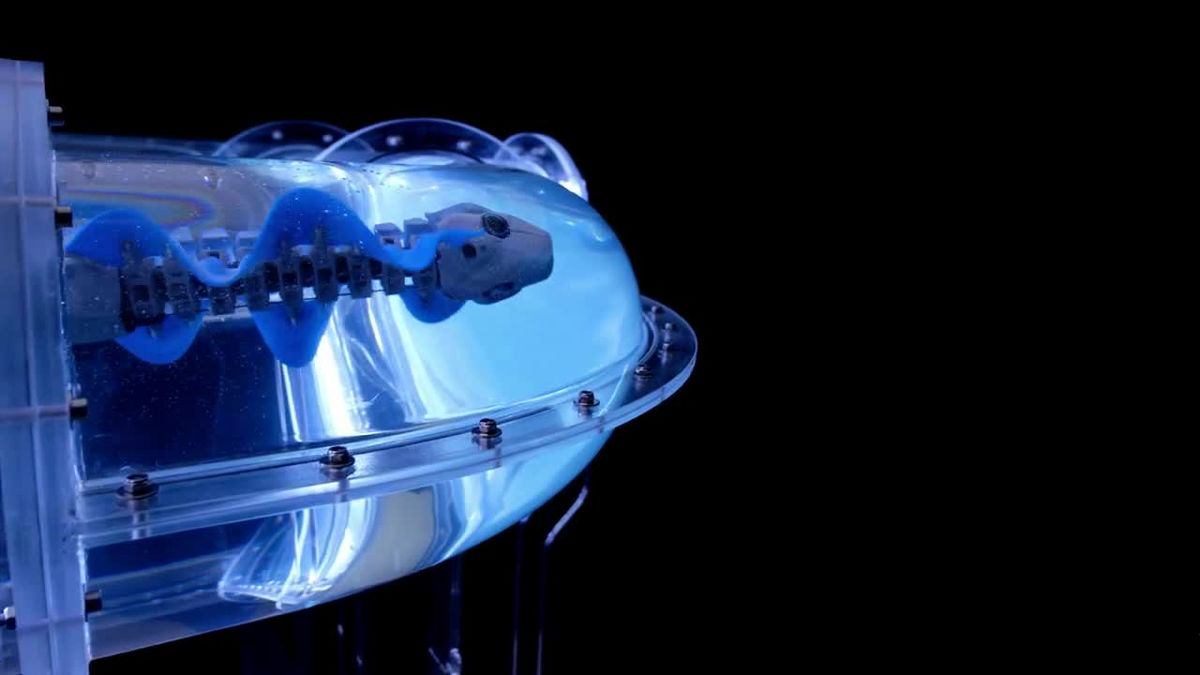
コウイカやヒラムシといった生き物は、全身に沿ってついているヒレを途切れなく動かすことで前進していきます。Festoが新たに開発したBionicFinWaveはこれらと同じ動きを採用したもので、アクリルガラスで作られたパイプの中を巧みに泳ぐロボットです。また、センサーで感知した温度や水圧といったデータを外部のタブレットに送信することもできます。
以下のムービーから実際にBionicFinWaveが泳いでいる様子を見ることが可能です。
Festo – BionicFinWave (English/Deutsch) - YouTube
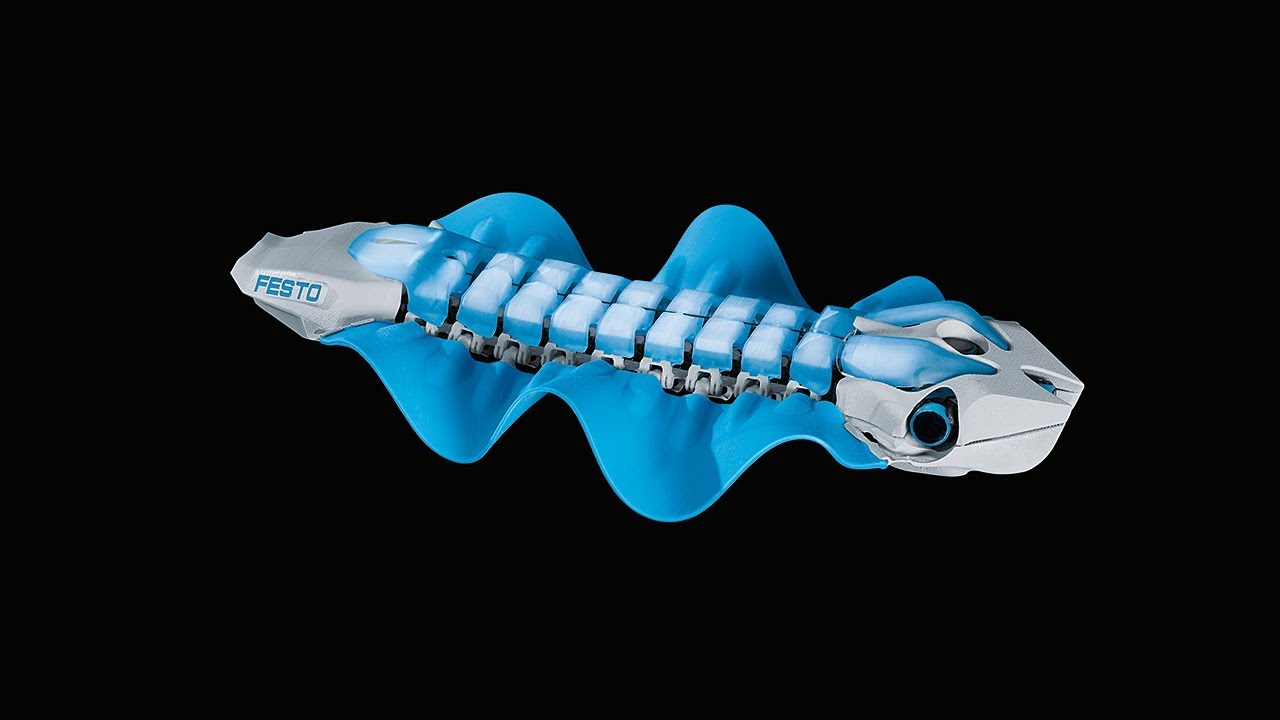
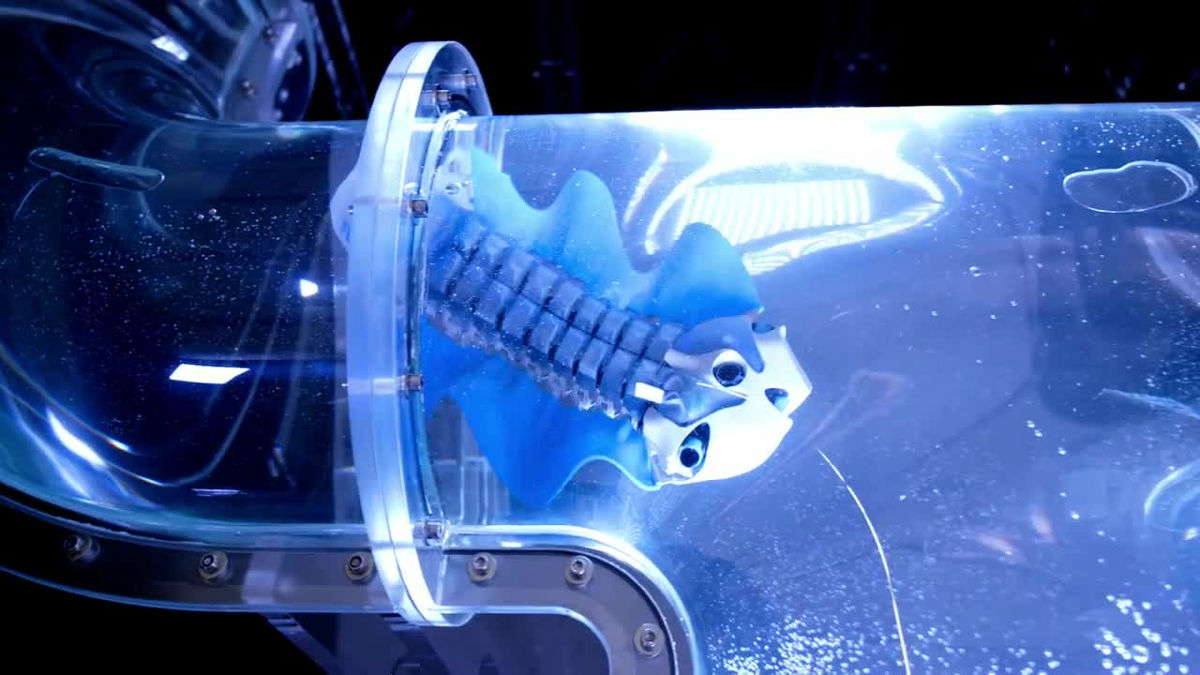
頭から尻尾まで続くヒレが波のように絶え間なく動きます。
ちらりと見えるBionicFinWaveの顔。

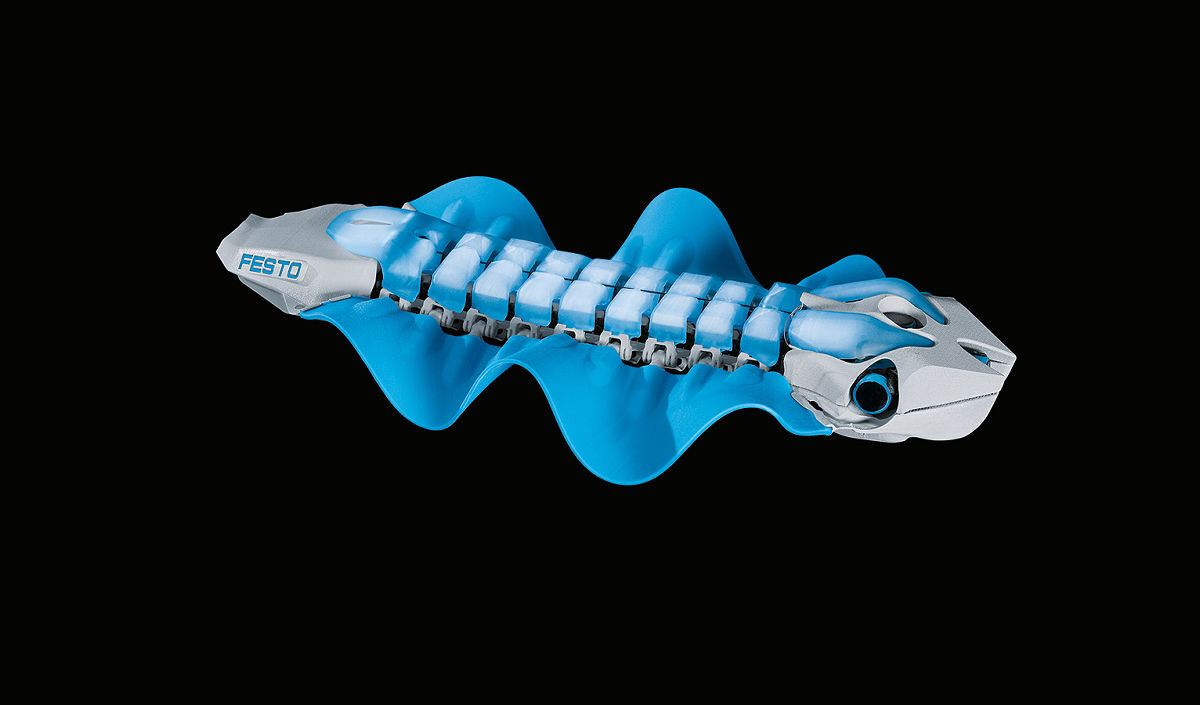
尻尾には「FESTO」の文字が刻まれていました。

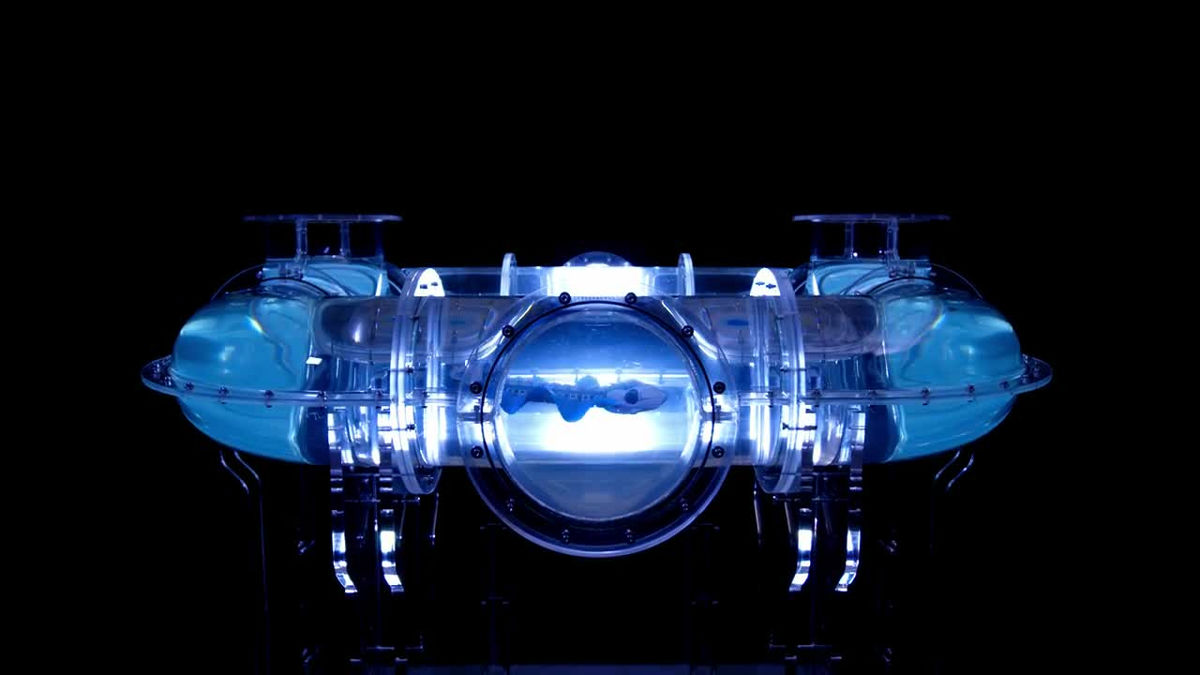
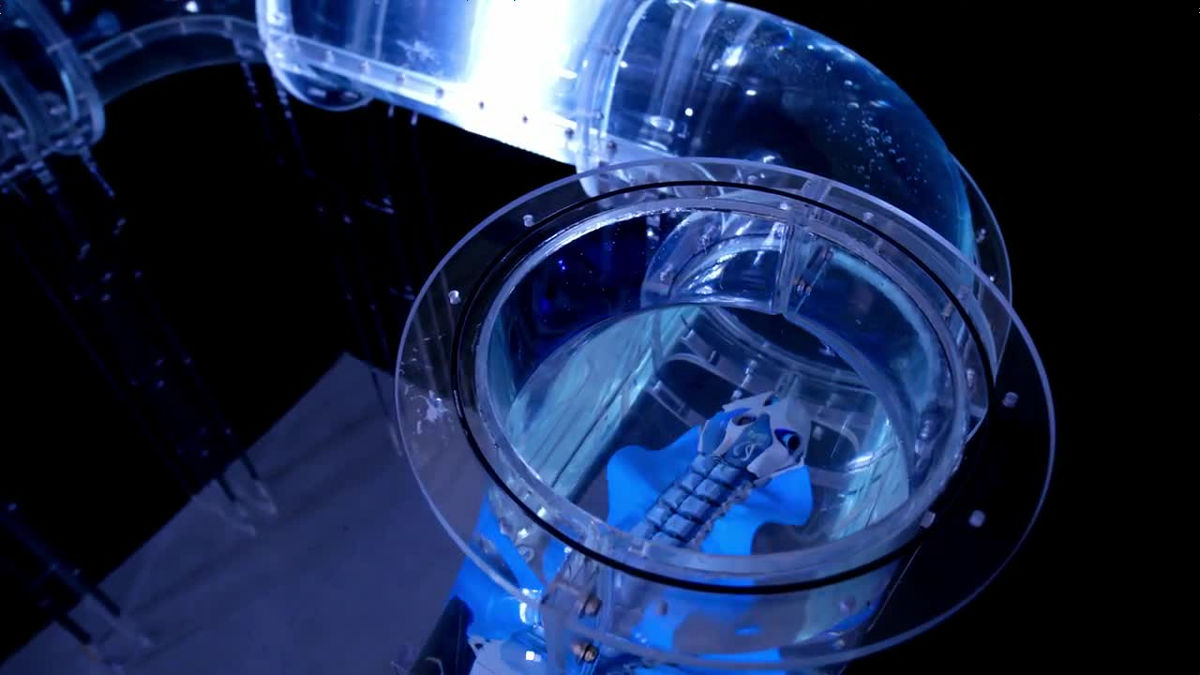
これがBionicFinWave専用のパイプ。
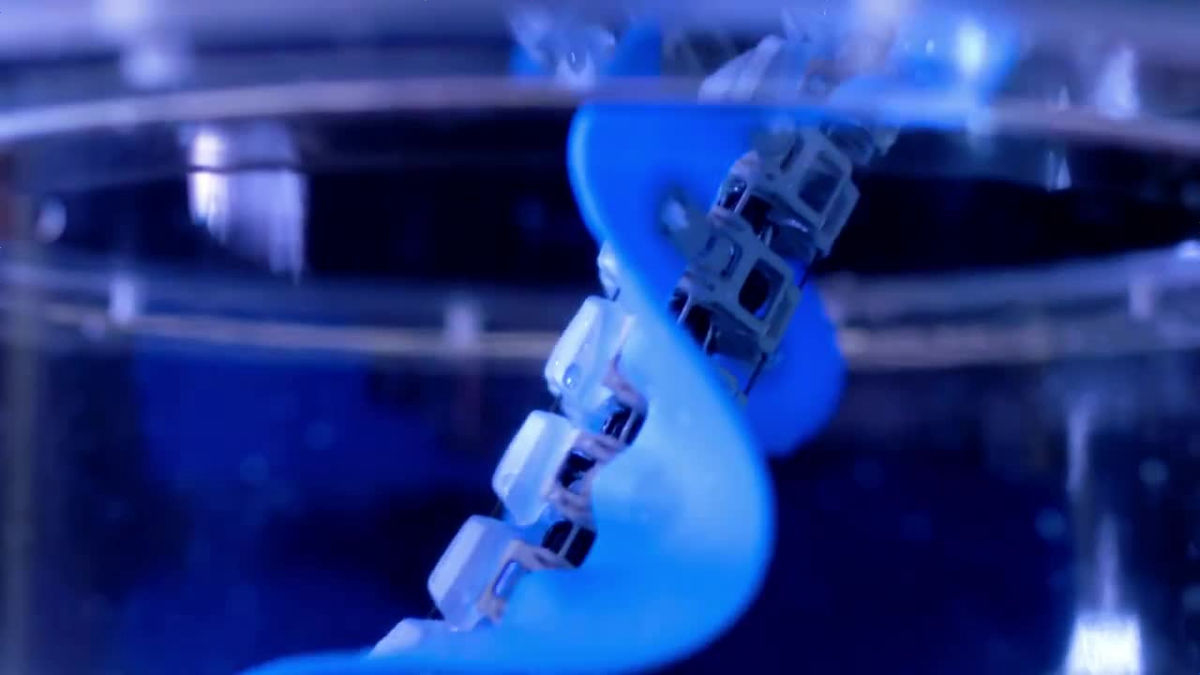
パイプの中をゆうゆうと泳ぐBionicFinWave左右だけではく、背中やお腹を動かすことでも水を後ろへと押しやり、推進していきます。
上から見るとこんな感じ。
下から。

動きのパターンを変えることで前進だけでなく後退も可能とのこと。
BionicFinWaveの左右のヒレは骨組みなどが入って折らず、すべてシリコンで作られているため、柔軟で流動的な動きを作り出します。
本体からは9本のアームで接続されており、アームは本体に搭載されているモーターによって稼働。本体内には2つのクランクシャフトが内蔵され、それぞれが左右のヒレを動かすようになっています。
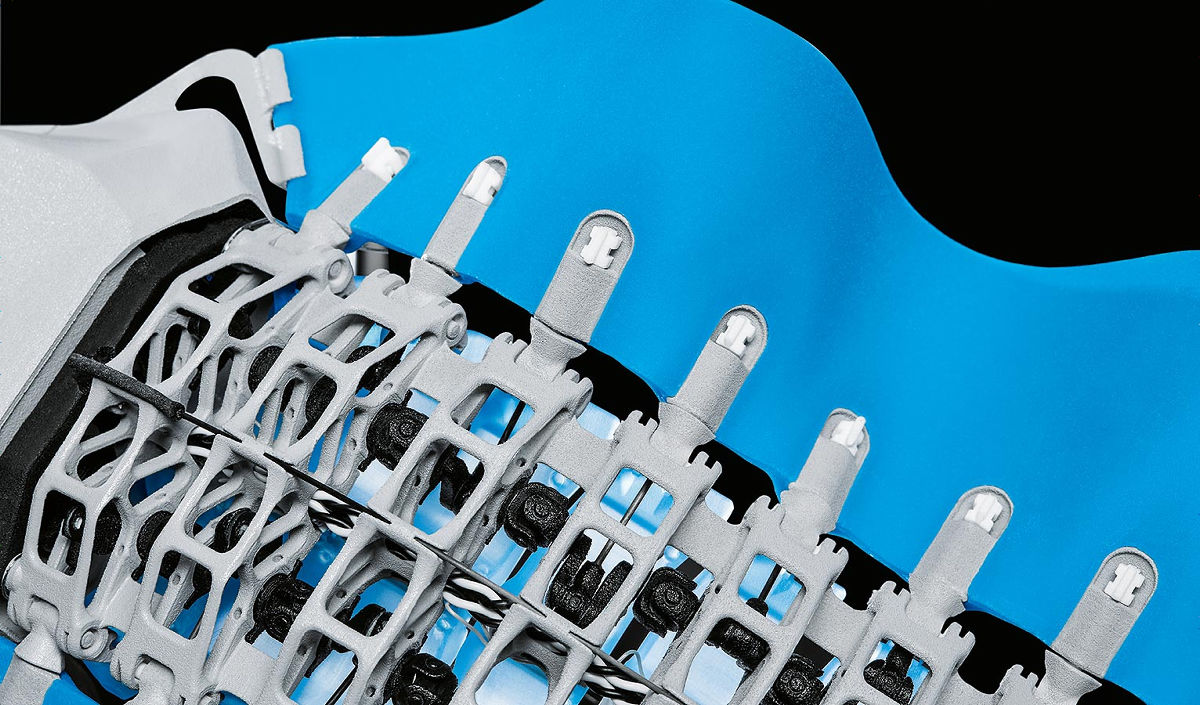
例えば、カーブを曲がる必要がある場合は、外側のヒレが内側のヒレよりも速く動きます。

多くのパーツは3Dプリンターで出力されているとのこと。本体前面には基板やプロセッサー、超音波センサー、圧力センサーが搭載されています。これらによってBionicFinWaveは常に推進や壁からの距離を測り、なめらかにパイプの中を移動することが可能です。

Bionic Learning Networkと呼ばれるプラットフォームによってBionicFinWaveは水中の観察やデータ収集といったさらなるタスクを行えるようになるため、汚水処理といった分野での活躍が見込まれるほか、柔らかいロボットを製造する方法にBionicFinWaveの技術が生かされる可能性もあるとのことです。
・関連記事
コウモリや「バック転で逃げるクモ」など自然の生き物を驚くほどリアルにメカで再現したロボット - GIGAZINE
巨大なトンボ型で自由自在に飛行しスマホで操作可能なロボット「BionicOpter」 - GIGAZINE
死んだ愛猫をフライングキャットマシンとして弔うアート - GIGAZINE
スマホから操作して空中撮影を可能にする本格トンボ型ロボット - GIGAZINE
ボストン・ダイナミクスの新映像は「ドアノブをつかんでドアを開ける」4足歩行ロボット - GIGAZINE
・関連コンテンツ





in 動画, ハードウェア, 生き物, Posted by darkhorse_log
You can read the machine translated English article Festo announces robot "BionicFinWave" wh….