




自分で判断して行動する「シロアリロボット」の開発がハーバード大で進行中

家の柱を食い荒らすなど、人間にとっては迷惑な生き物にもなるシロアリは、体が小さくても多くが集まることで想像を絶する超巨大構造の巣を地中に築き上げるなど、見た目からは想像もつかない能力を備えています。そんなシロアリの習性を応用して複数のロボットの制御に活用し、高度な運用を実現させようとするのがハーバード大学で研究が進められている「TERMES」です。
Robots to the rescue | Harvard Gazette
http://news.harvard.edu/gazette/story/2014/02/robots-to-the-rescue-2/
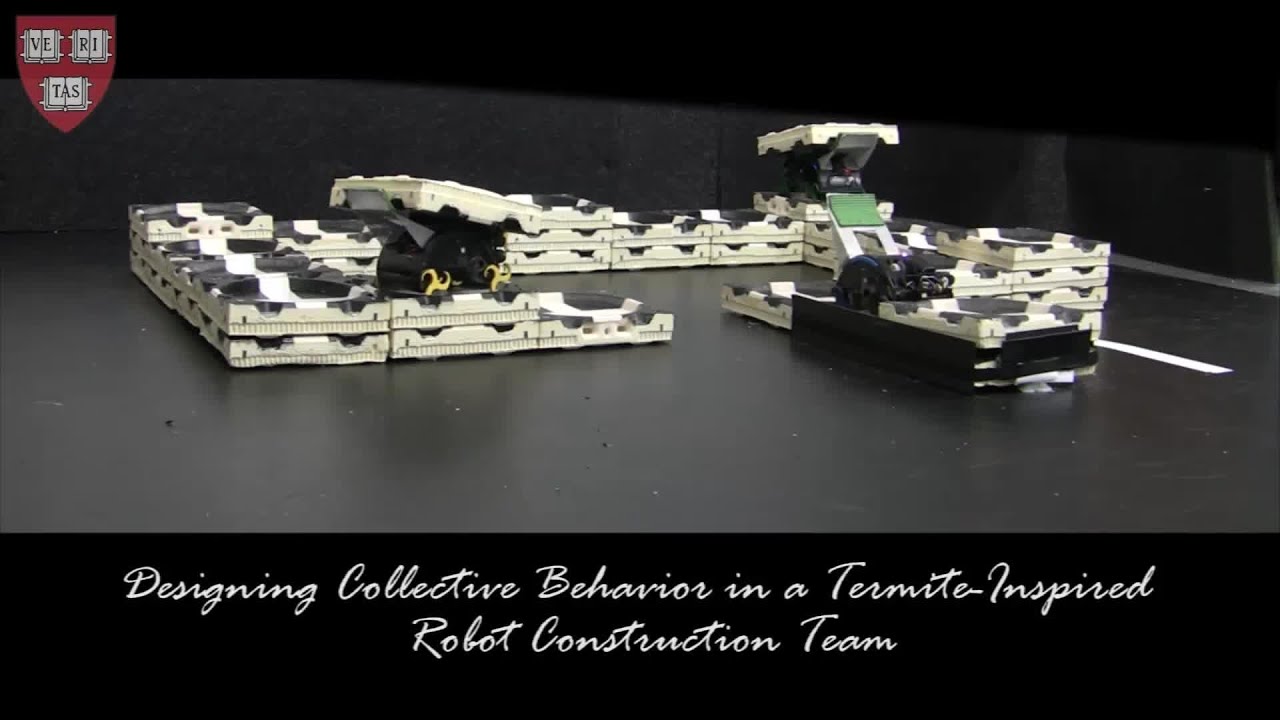
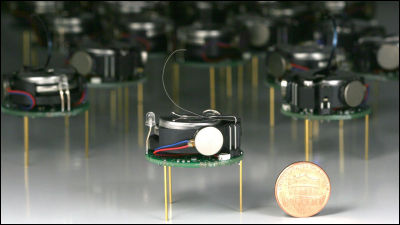
この「シロアリロボット」のTERMESは特殊なタイヤを4つ備え、複数のセンサーを備えた自律型のロボットです。白く見える正方形のタイルを車体の背中に載せて目的地まで運び、アームを操作してタイルを降ろして設置する仕組みになっており、その姿は「小さな建機」といったところ。実際に動作してタイルを積み重ねていく光景は、以下のムービーから確認することができます。
Designing Collective Behavior in a Termite-Inspired Robotic Construction Team - YouTube
日本ではあまり見ることはありませんが、海外に見られるシロアリの中には群れが力を合わせて高さが5メートルほどにも達するアリ塚を作ることがあります。しかし、作業においては中心となって指示を出すリーダー役のアリがいるわけではなく、間接的な意思伝達の方法を用い、それぞれが状況を判断しながら動くというスティグマージーと呼ばれるプロセスによるものとなっています。

そのモデルをロボットに応用したのが、ハーバード大学のエンジニアリング・応用化学スクールの研究者チームが開発した「TERMES」です。TERMESは特殊なタイヤを備え、資材を背負ったままでも段差を越えていく高い踏破能力を備えています。
TERMESに伝えられるのは、個々の個体に応じた細かい作業指示ではなく、全体の完成図のデータのみ。目的地点に到達すると、まず現状を確認して必要な作業を認知、そして必要な場所に資材を設置するという作業を繰り返します。特殊タイヤのおかげで、高さのある構造物を作り上げることも可能となっています。
全体像のみを指示しているため、目的の形状に達するまでには必ずしも同じプロセスを経ないのも特徴となっています。以下のムービーでは、積み上げる順番が異なっていることが確認できます。
途中で、わざと設置したタイルを人が移動させてしまっても、エラーを起こすことなく状況の変化に対応することが可能。

研究チームでは、この技術を応用して洪水などの災害時に土のうを積み上げたり、火星に基地を建設するなどの宇宙開発の現場で活躍させることも可能としています。通常、ロボット制御を行うケースでは全体をマクロ的視点で把握して指示を出す「セントラル・コマンド型」のシステムが用いられることがほとんどですが、自律して動作を行うことができる「シロアリ型」であれば数十台~数千台規模での運用が可能になると考えられています。

研究チームのコアメンバーであるRadhika Nagpal氏は「最終的に目指すところは、『セントラル・コマンド型』と『シロアリ型』の両方を兼ね備えたものを目指しているといっていいでしょう。しかし現在は一方の究極の状態を追い求めている段階であり、シロアリ的目線から見れば今のところうまく行っているといえるでしょう」と将来の展望について語っています。
Self-organizing Systems Research Group
http://www.eecs.harvard.edu/ssr/projects/cons/termes.html

・関連記事
ゴキブリをモチーフにした世界最速の小型ロボット「VELOCIRoACH」誕生 - GIGAZINE
GoogleがFoxconnと共同で「労働者代替ロボット」の開発へ乗り出すことが判明 - GIGAZINE
Googleが歩行ロボットメーカーのボストン・ダイナミクスを買収 - GIGAZINE
ダイソンが人間と同じように考え見ることのできるロボット製造を目指すことが判明 - GIGAZINE
Googleが謎の人工知能開発スタートアップ企業「DeepMind」を500億円で買収 - GIGAZINE
・関連コンテンツ






in ハードウェア, サイエンス, Posted by darkhorse_log
You can read the machine translated English article Development of "termite robot" that judg….