




東大から世界へ飛躍、自律型飛行ロボ「Phenox」がKickstarterプロジェクトを開始

Drone(ドローン)と呼ばれる飛行ロボットの進化はめざましく、商品を配達をしたり、楽器を演奏したりとさまざまなマシンが開発されています。そんな世界的なドローンブームの中、東京大学の若い研究者が、周囲の状況を判断して自律的に飛行できる世界で初めてのオンボードタイプの小型飛行ロボット「Phenox(フェノクス)」の開発に成功し、クラウドファンディングサイトKickstarterでプロジェクトを立ち上げると聞き、いてもたってもいられず東京大学を訪れてPhenoxを見せてもらうことにしました。
Phenox Lab | Fly Your Creativity with Phenox!
http://phenoxlab.com/
東京大学本郷キャンパスに到着。

東京大学工学系研究科航空宇宙工学専攻知能工学研究室の、とある一室がPhenox生誕の地。

日夜、手作業で研究・改良が進められている模様。

Phenoxがどんな飛行ロボなのかは以下のムービーで確認できます。
Phenox PV - YouTube
「Phenox(フェノクス)」と声をかけると……

Phenoxが手のひらから離陸。Phenoxは音声を認識することが可能。

笛を鳴らすと……

手のひらヘリポートに着陸成功。

Phenoxは周囲の状況や障害物を検知しながら飛行できるIntelligent Self-Control System(ISCS)を搭載。

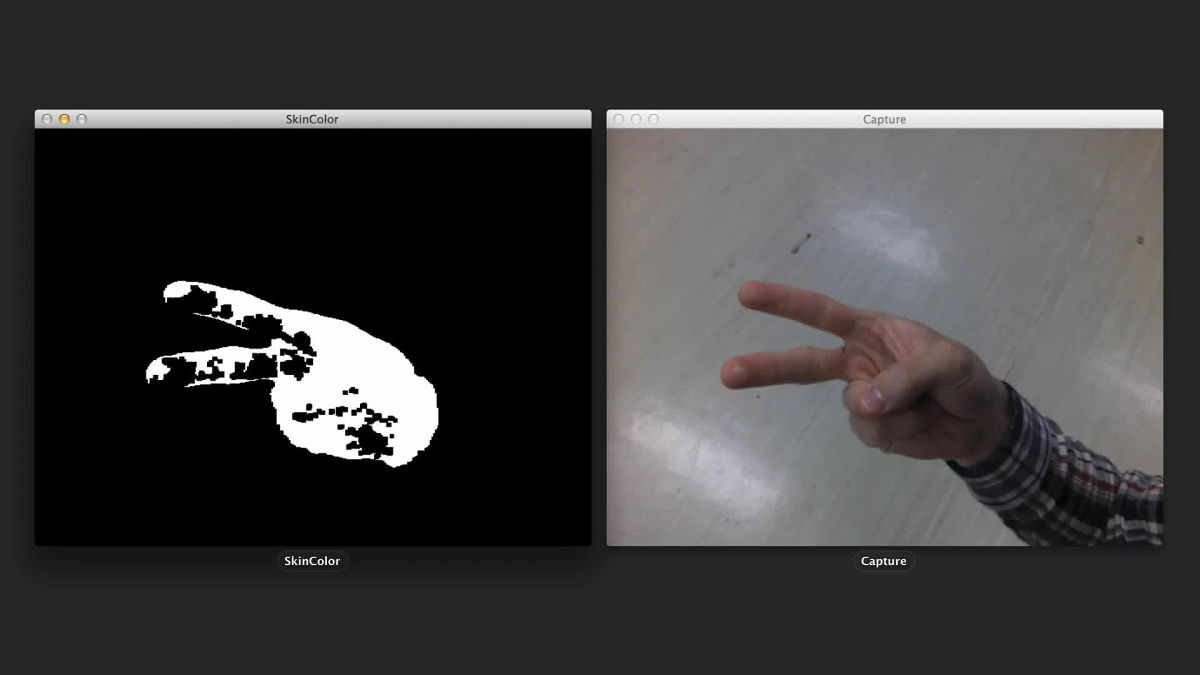
カメラで撮影しつつ画像をリアルタイムで解析、周囲の状況を判断しています。
手の動きなどを認識することも可能。
飛行するPhenoxを手から手へと……

リレーのように……

ジェスチャーで手渡しすることができます。

◆開発者紹介
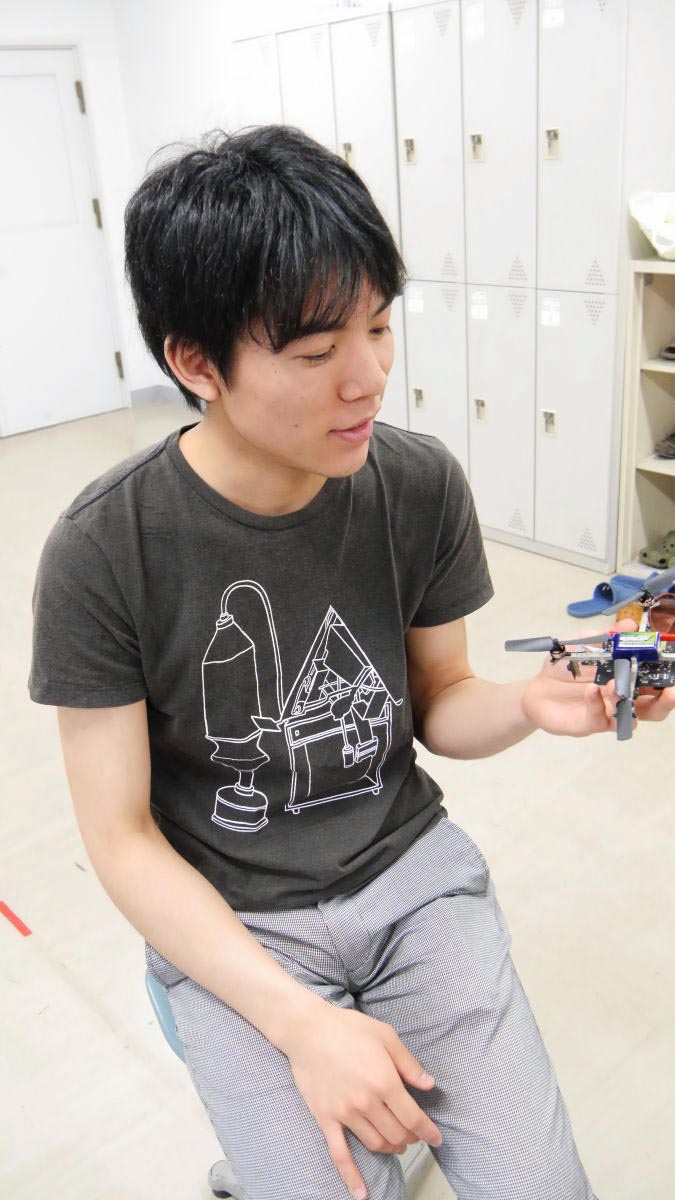
今回、取材に応じててくれたのはPhenox Lab(フェノクス・ラボ)のチーフエンジニアの此村 領さん。東京大学大学院工学系研究科航空宇宙工学専攻(知能工学研究室)の博士課程に在籍中。
インタラクションデザイナー・エンジニアの三好 賢聖さん。同じく東京大学大学院工学系研究科航空宇宙工学専攻(知能工学研究室)の修士課程に在籍しています。
◆Phenoxの外観チェック
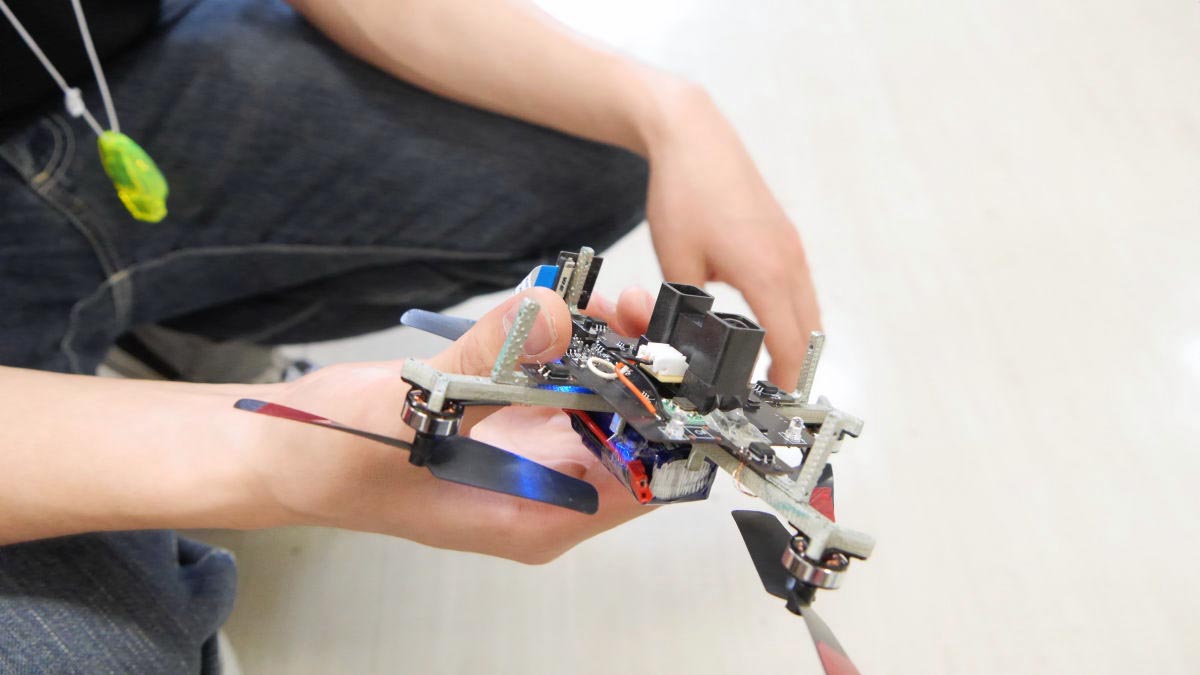
さっそく、現在も日夜開発が続いているPhenoxの第4世代プロトタイプを見せてもらいました。iPhone 5sと比較するとこんな感じ。Phenoxはモーターの対角が約12センチと手のひらサイズの小型飛行ロボットです。

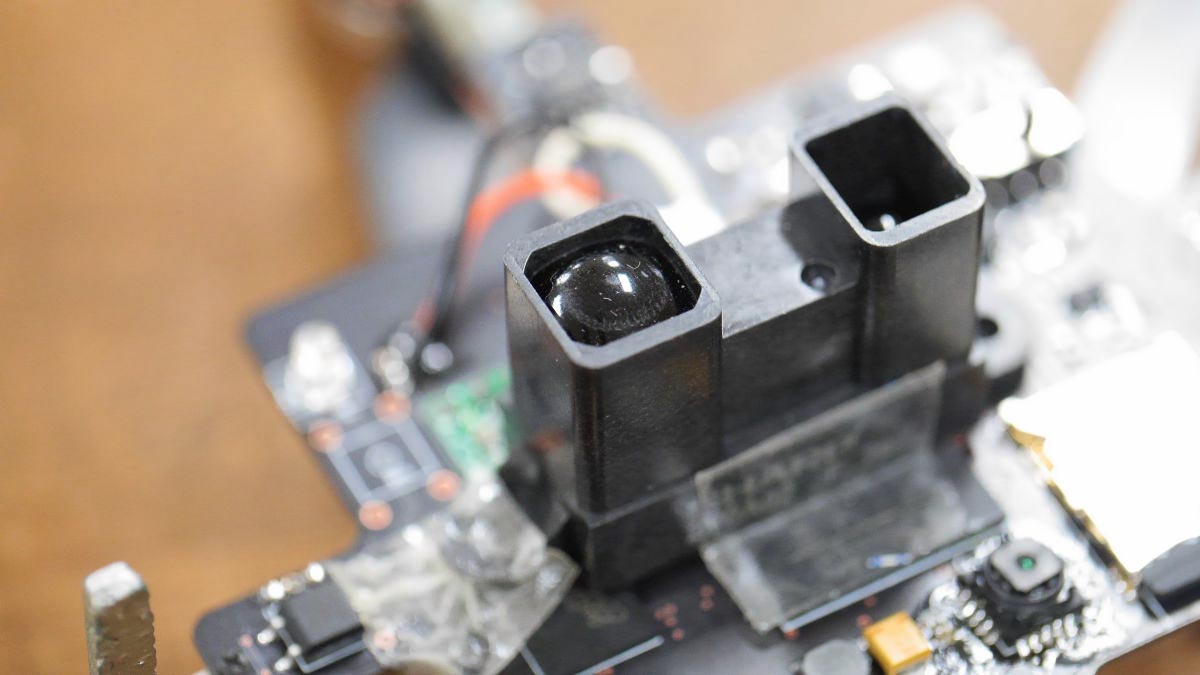
この試作機は写真中央部の突起物である「レンジセンサー」のセッティングを詰めている途中とのこと。レンジセンサーは地面との距離を測定しどれくらいの高さを飛行中かを認識する部品です。
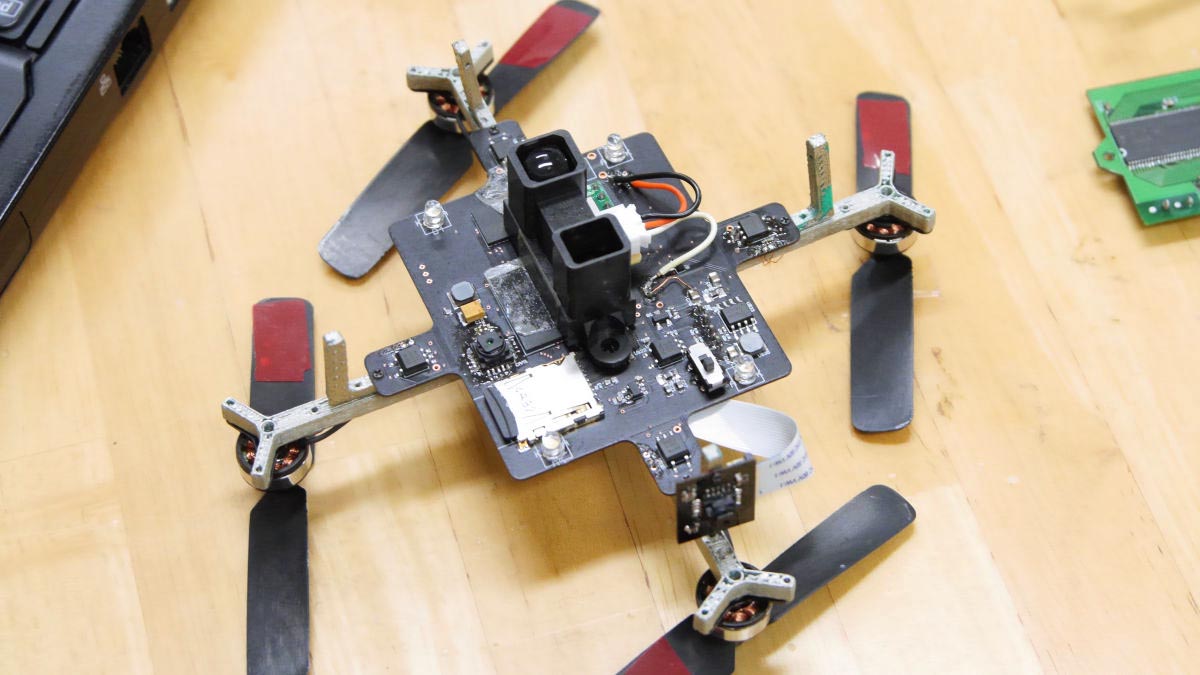
レンジセンサーの下に見える正方形のチップがPhenoxの「頭脳」であるSoC・Zynq。

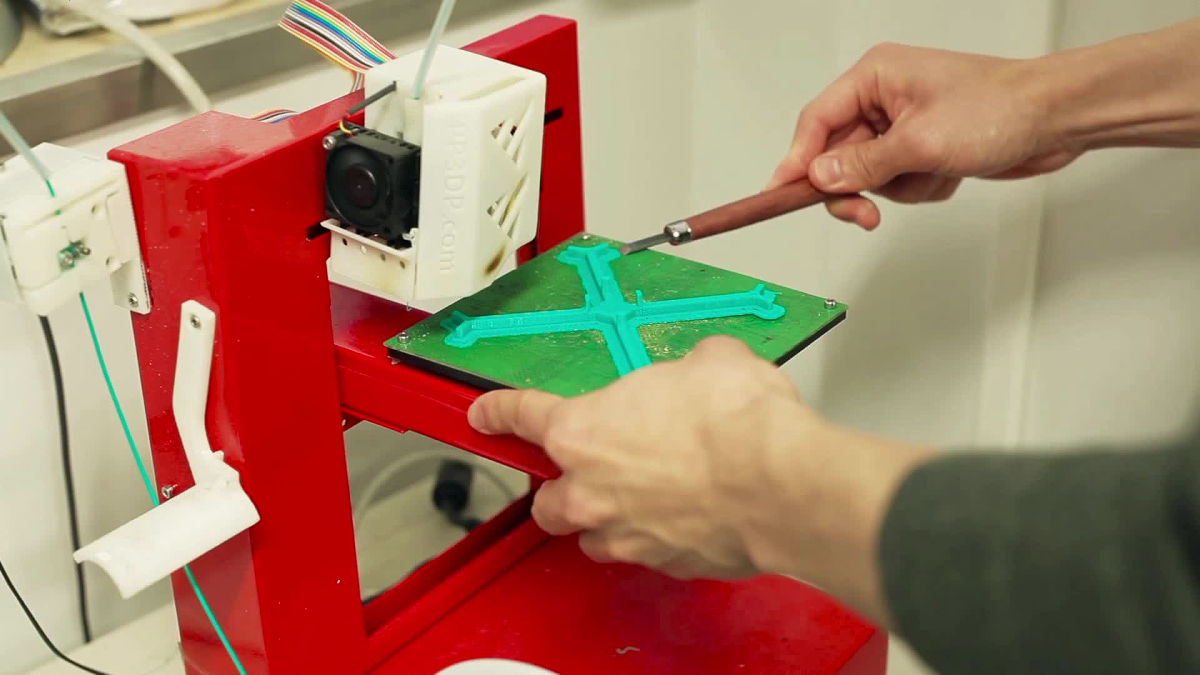
十字のフレームは一見金属製に見えますが軽量化のため樹脂製。3Dプリンターで出力したハンドメイドとのこと。Phenoxの重さはわずか65g。

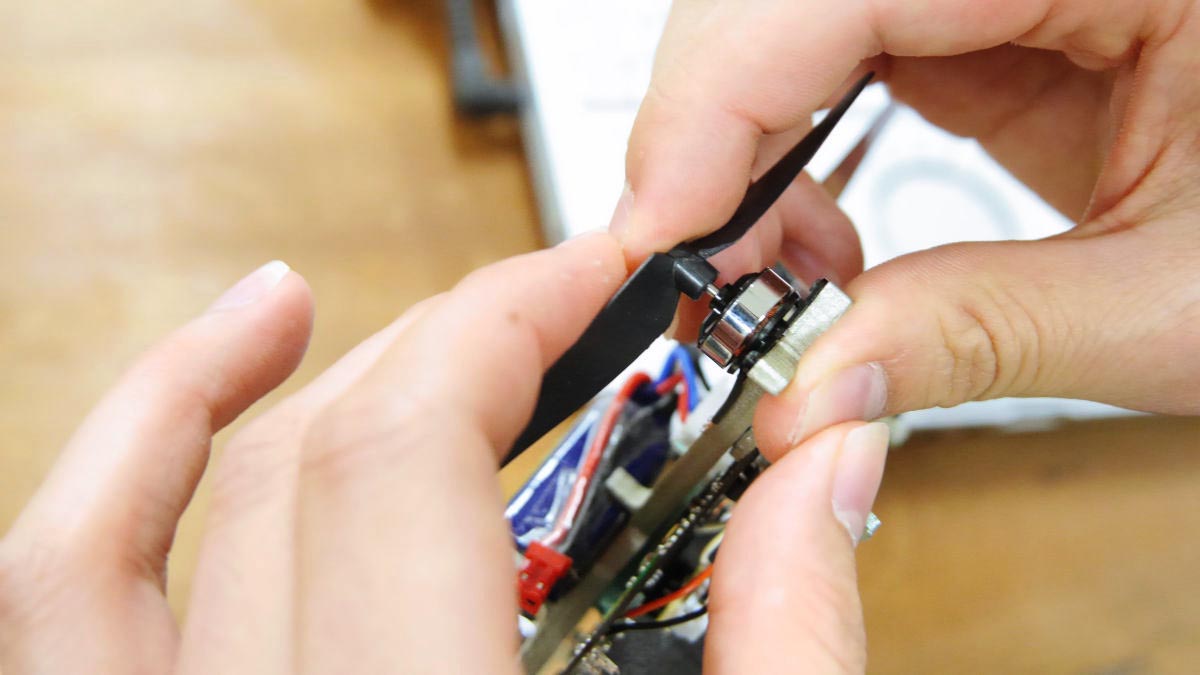
プロペラとモーター。

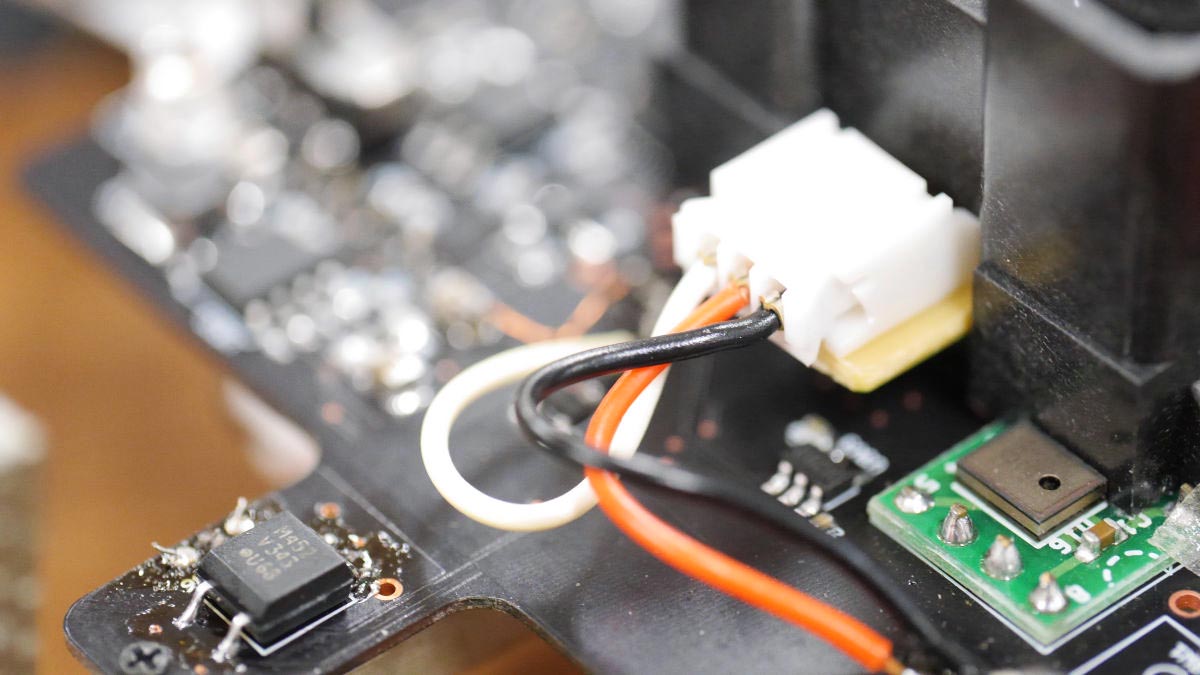
モーターからのリード線は手作業で半田付けしているとのこと。

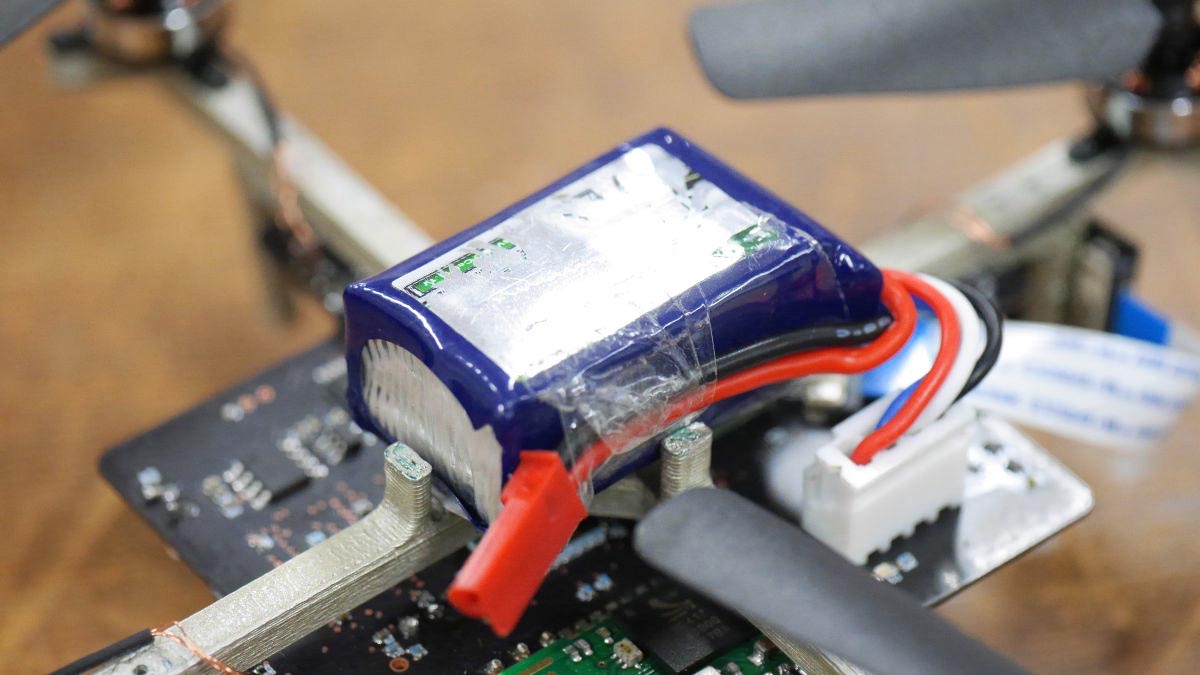
リチウムイオンバッテリー。
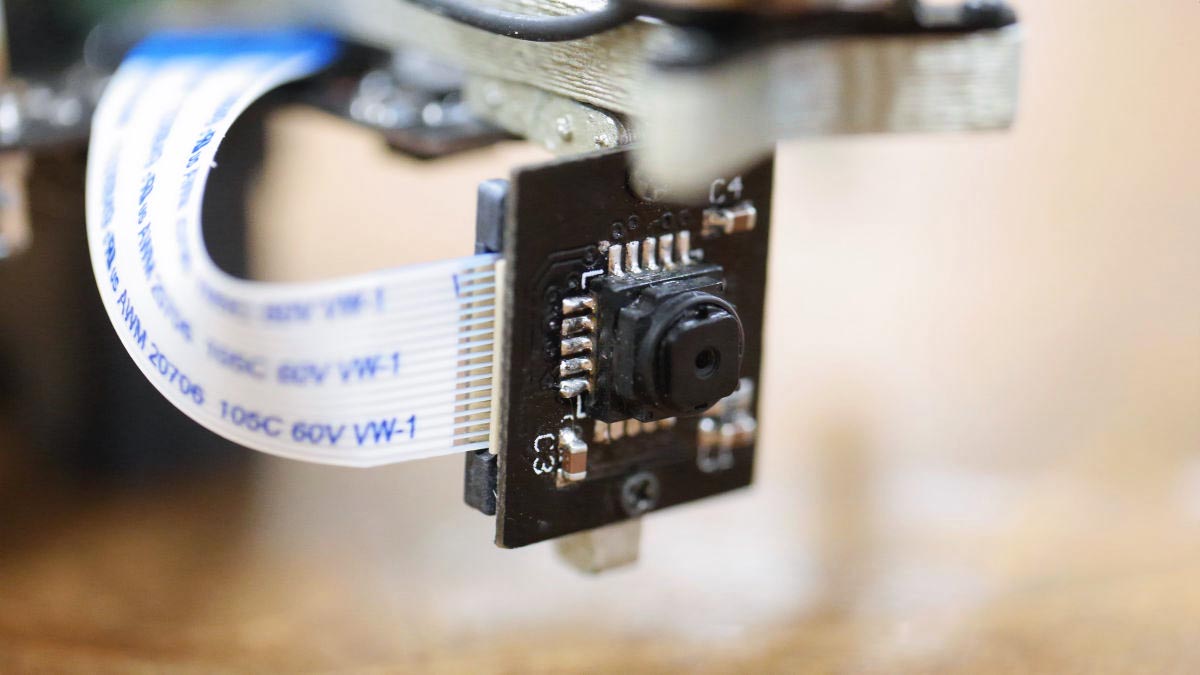
水平方向のカメラは、周辺の状況を観察、特徴点を認識して自分の位置を正確に推定するためのもの。
インジケータランプの役割をするLEDと電源スイッチ。

コネクタ類はキャンパスから自転車で秋葉原へ買いに行って調達したもの。
裏側にあるレンジセンサーは地面との位置を測定します。
地面に向けられたもう一つのカメラは、色を認識・判断。

Phenoxの「足」。実験を繰り返しているためか下地のパーツカラーがあらわになっています。

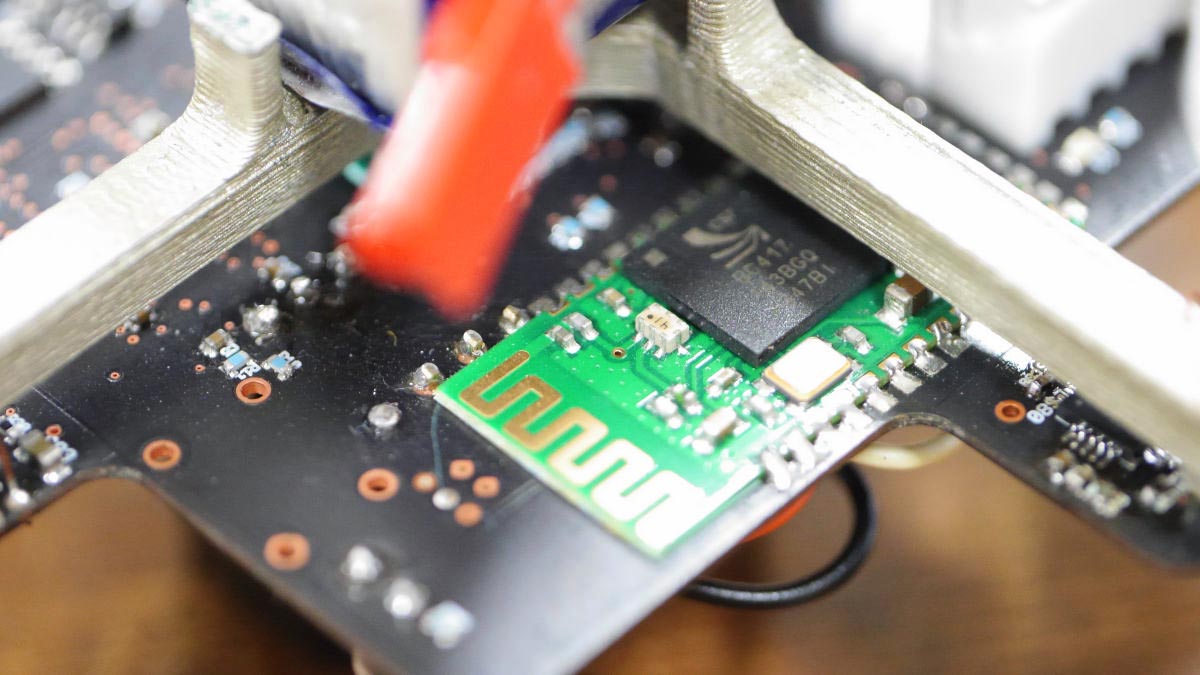
Bluetoothチップも手作業で半田付けするとのこと。
◆テストフライト
改良中のPhenoxでしたが、お願いして簡単なデモンストレーションとして「人を認識して追従する」という飛行動作を試してもらいました。
人を認識して追従する自律飛行ロボット「Phenox」 - YouTube
上のムービーのPhenoxはこんな感じで人を認識・追従しています。

◆インタビュー
Phenoxを開発するPhenox Lab(フェノクス・ラボ)を結成した二人にPhenoxや研究ビジョンなどについていろいろと聞いてみました。

◆Phenoxとは?
GIGAZINE(以下、G):
Phenox(フェノクス)という手のひらサイズの飛行ロボットを開発し、Kickstarterでプロジェクトを行うと聞きました。まずは、Phenoxについて簡単に教えてください。
此村 領(以下、此村):
Phenoxは外部からコントロール(操縦)されなくても飛行できる「自律制御機能」を備えたクアッドコプターです。一般的にDrone(ドローン)と呼ばれる飛行ロボは、コントローラーによる外部操作によって飛行していますが、Phenoxは自分で周辺の環境を把握してそれに合わせて飛行できるマシンです。
G:
飛行ロボが頭脳を持って考えているということですか?
此村:
そうです。一般的な飛行ロボは、それ単体で完結しているわけではなくて、正確に言うと飛行ロボ本体とコントローラーがセットで機能しています。AR Droneのような飛行ロボも、iPhoneなど本体とは別に地上機と呼ばれる「頭脳」部分があって、その指令通りに飛行しています。Phenoxは地上機不要で、「単体で頭脳まで持ち合わせている」と考えてもらえれば分かりやすいと思います。
三好 賢聖(以下、三好):
「頭脳」を持ち合わせているという点で、phenom(天才)+phoenix(不死鳥)の造語としてPhenoxと名付けました。
G:
「環境を把握する」のはどのように行うのですか?
三好:
Phenoxには水平方向・下方向の2つのカメラとレンジセンサーが搭載されています。このカメラやセンサーによって外部の環境を正確に把握して自分がいる位置(自己位置)を推定できます。これまで、地上機として高速な計算能力を持つコンピュータを使うことで自己位置推定できる自律型の飛行ロボットはあったのですが、高い処理能力が求められるため頭脳部分まで飛行ロボ本体に載せる(オンボードという)ことはできませんでした。Phenoxは、この小さなマシンに頭脳部分もオンボードできたという点で世界初の自律飛行ロボです。

G:
どのようにしてオンボード化が可能になったのですか?
此村:
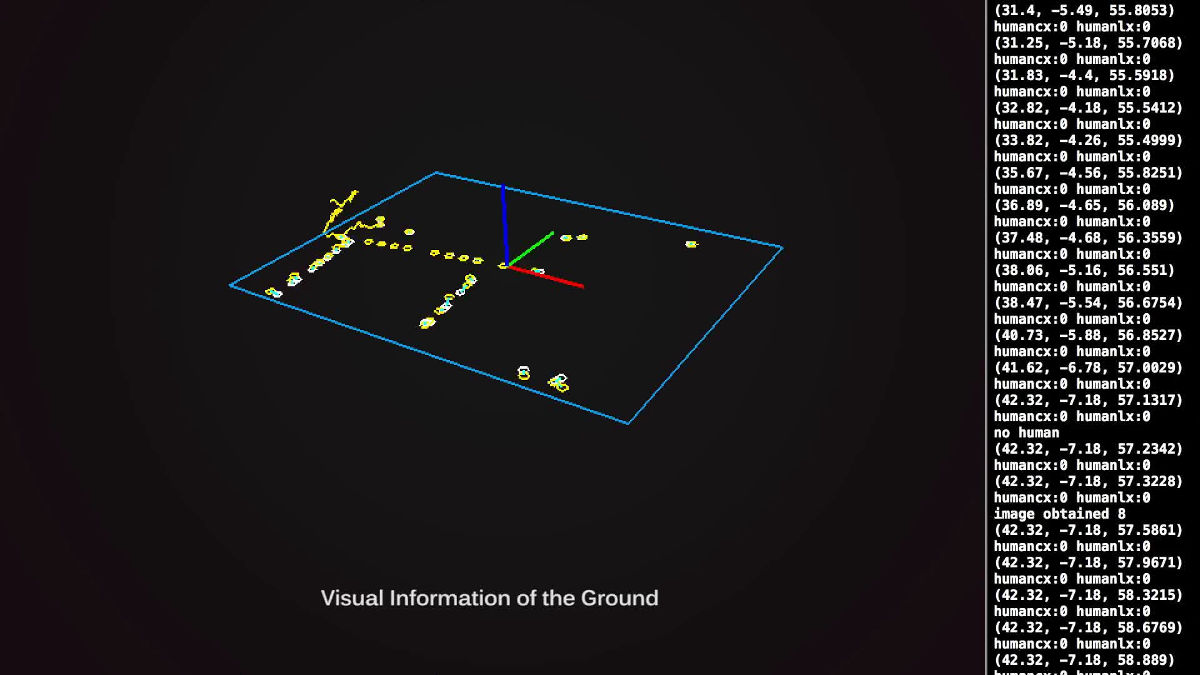
一般に自己位置推定は外部の映像を計算することで行います。映像の特徴や奥行きなどをカメラやセンサーのデータを計算処理するのですが、私たちは、小さなFPGAと呼ばれる並列計算機でも計算できる「軽い」計算アルゴリズムを開発しました。点がわらわら動いている映像です。

◆Kickstarterに出す理由
G:
今回、KickstarterにPhenoxプロジェクトを出したと聞いたのですが、これはPhenoxの製品化を見据えてのことですか?
此村:
いいえ。実はクラウドファンディングで資金を調達して大量生産でコストを抑えたい、というわけではないのです。Phenox開発プロジェクトは独立行政法人情報処理推進機構の「2013年度未踏IT人材発掘・育成事業(以降、「未踏事業」)」の支援を受けて活動しているものです。未踏事業は、IT技術を駆使してイノベーションを創出することのできる独創的なアイディア・技術やビジネスシーズの資質・素養を有する若い個人の発掘・育成を行うという理念のプロジェクトですが、2013年度未踏事業にPhenoxが採択されました。
三好:
未踏事業は2013年10月から始まって2014年6月に成果報告することになっていますが、「こんな物を作りました」ではダメなのです。ある特定の研究を支援しているわけではなく、「日本のITを変える行動を起こして欲しい」という趣旨なので。そういう観点で自分たちに何ができるだろうかと考えたときに、クラウドファンディングを通じてPhenoxの技術を世界中にアピールしよう、そういう場としてKickstarterを選びました。
此村:
関連研究をしている研究者の方以外の人にもPhenoxを見てもらいたいのです。具体的には、DIYでDroneを作って公開するコミュニティのDIY Dronesのギークな人たちですね。アメリカを中心に、世界中に6万人以上のDrone愛好家がいてコミュニティはすごく活気があります。尊敬の意味をこめて彼らを「ハッカー」と呼びますが、そんなハッカーの人たちにもPhenoxを見てもらいたい。意見などいろんなフィードバックで得られるものを期待しています。アカデミックなクローズドな世界に閉じこもっていないで出て行こうと。パブリックに出す方が、圧倒的に早く広がるはずだと思うので。
G:
Kickstarterにはすでにプロジェクト申請を行っているのですね?
三好:
5月3日に行いました。審査に1週間くらいかかるらしくてプロジェクトはまだ確定していません。今日にも審査結果が来るんじゃないかと、ちょっとソワソワしてるんです(笑)
G:
Kickstarterの審査で落ちることもあるんですか。
此村:
あるみたいです。未踏事業出身者でKickstarterでプロジェクトを実行した経験のある先輩に話を聞いて万全の態勢で準備はしたつもりですがドキドキしてます。
G:
Kickstarterのプロジェクトの内容はどのようなものですか。
三好:
今回、私たちは30台限定でPhenoxを出資者の方の手に届けようと考えています。
G:
たった30台?
此村:
少ないですけど、これがぎりぎりかなと。実は、Phenoxは搭載するカメラ・マイク・ソナーセンサーなどは手で実装しています。
G:
手作りですか?
此村:
そうですね。結構、ハンドメイド(笑) フレームも3Dプリンターで1体ずつ作ってます。
G:
1台作り上げるのにどれくらいの時間がかかりますか。
此村:
フレームの3Dプリントが済んでいるという条件で、1台あたり2時間くらいで組み立てられます。もちろん、同じ行程をまとめてやることでもっと効率的にできるでしょうけれど、組み上げた後の飛行テストに結構時間がかかります。
G:
飛行テストまで行っての納品なのですね。いくらの出資でPhenoxをゲットできますか。
三好:
30台という少量の生産なので高くて……。750ドル(約7万5000円)で1台手に入ります。
此村:
各種部品代も割高になるのですが、基板代が特に高いです。設計通りの専用基板を作ってもらうのですが、その基板実装代が注文数が少ないと非常に高いのです。
三好:
大量生産すれば圧倒的に安くなるのは分かっているのですが、そうなると自分たちですべてをフォローできなくなります。
此村:
トラブルに対応できるようにメールなどを通じてフォローしたいと考えていて、そうなるとしっかり対応できるのは30台が限界かなと。なにより2人ではそれ以上の数を生産できない(笑)
G:
Kickstarterの出資者として想定しているのはどのような人たちですか?
此村:
PhenoxはLinuxを搭載しています。また、プログラムにはC言語を使っているので、ある程度の知識がある人向けだと思います。ホバリング・画像取得・上昇・降下といったチュートリアルのライブラリ(ソースコード)を提供しますが、自分で改良できる範囲は広く自由度は高いと思います。自己責任でいろいろしてカスタマイズできるのでハッカー向きですね。

◆今後の研究について
G:
お二人は現在はPhenoxにかかりっきりという状態ですか。
此村:
そうですね。少なくとも未踏事業が終わる6月まではPhenoxにかかりっきりです。
G:
Phenoxを含めて、今後どのような研究を行っていきたいですか?まずは近い目標について考えていることを教えてください。
此村:
近い目標は、Kickstarterプロジェクトを成功させること(笑) あとはPhenoxの研究論文を書くことですね。実は、現在の第4世代のPhenoxにはまだアカデミックな場では発表していない技術が盛りだくさんなのです。現在、東京大学から特許出願中の技術は第1世代Phenoxのもので、その頃から比べると格段の進歩を果たしています。
三好:
昔の成果が遅れて世に出ているという面があって。「Phenoxで使ってるあの技術すごいね」と言ってもらえることがあるのですが、「実はもっともっと先のことがすでにできてるんです」と(笑)
此村:
まず論文で発表するのが普通なのでしょうけれど、今回はKickstarterが最初のお披露目の場という珍しい形だと思います。先に国際会議で出す方が良いという意見もいただいたのですが、未踏プロジェクトも含めてせっかくの良い機会だと思うので。
G:
Kickstarterの後は論文作りに忙しくなりそうですね。
此村:
はい。単に「Phenoxができました」では論文にならないのでアルゴリズムをもっと詰める必要があると思います。
三好:
私は、近い目標としてはPhenoxを同時に複数台飛行させて連携させる「群飛行」をやりたいですね。もともと、此村さんはクアッドコプターを研究していて、私は飛行船を開発していました。此村さんは飛行ロボットをいかに賢くするかという方向で、私は飛行船で「空間演出」できないかという方向でした。
此村:
私が修士1年生の頃からクアッドコプターの開発を本格的に始めて、1年くらいでうまく飛ばせるようになりました。そこで未踏事業に応募しようかなと考えて三好君を誘ったのです。そしてフェノクス・ラボを結成しました。
三好:
当時、エンターテインメント・メディア向けに飛行船を作ることができないかと考えていたので、Phenoxはエンターテインメント性もあっていいなと感じました。たとえば、企業の受付役をPhenoxに任せても面白いのではないかと思います。先ほど群飛行と言いましたけど、複数のPhenoxが玄関で歓迎してくれて、待ち時間に楽しませてくれる。時間になればついてきてくださいと道案内を始める、なんて使い方も楽しいと思います。そこには実用を超える「楽しみ」の要素があると思います。
G:
究極の目標というかビジョンみたいなものがあれば教えてください。
此村:
飛行ロボットも含めてもっとロボットを身近なものにしたいと考えています。今のロボットの多くはネットワークにつながっていて「情報を収集する」という役割で使われるものも多いと思います。クラウドやビックデータという流行から当然のことなんでしょうけど。けれど、全体像が見えないこともあるし、それではロボットに親しみを持てないのではないかと思います。もっとクローズドなシステムのロボットの方が人間とのコミュニケーションが進むのではないかと。
G:
航空宇宙工学専攻と聞いていて飛行機やロケットをイメージしていたので、お二人の研究テーマがロボットというのは意外でした。
三好:
私たちは身近なスケールの「空中」を研究しているという感じですね。
此村:
重力に支配されているので日常空間の下の方に物が集中しています。だから上のスペースがぽっかり空いている。究極的に、空間に飛行ロボが常駐して、人間とコミュニケーションを取りながら共生するという世界もアリだと思います。
◆いざKickstarterから世界へ
インタビューの最中にKickstarterからPhenoxプロジェクトを承認するという通知が来ました。なんという偶然!
思わずガッツポーズ。
とてもいい笑顔です。
◆Phenoxプロジェクト
そして、2014年5月12日16時、いよいよスタートしたKickstarterプロジェクトは以下のサイトから。
Phenox: intelligent, interactive and programmable drone by frtr — Kickstarter
https://www.kickstarter.com/projects/253110733/phenox-intelligent-interactive-and-programmable-dr

「KickstarterプロジェクトはPhenoxのスタート地点」と語ってくれた二人。今後、Phenoxが世界の空へどんな風に羽ばたいていくのか楽しみです。
なお、Phenoxプロジェクトの出資締め切りは、日本時間2014年6月11日16時11分までとなっています。
・2014/05/13 追記
Phenoxプロジェクトは2日とかからず当初予定の30台分の出資の獲得に成功しました。
・関連記事
「Kickstarter」へ出資してゲットする方法&出資しまくった経験からわかった注意点まとめ - GIGAZINE
Amazonが無人飛行機で自宅前まで注文から30分でお届けしてくれる「Amazon Prime Air」がよくわかるまとめ - GIGAZINE
Googleが長時間高空滞在可能なドローン開発会社を買収、その目的は? - GIGAZINE
誰でも簡単にHDムービーが空撮できてiPhone/iPadがコントローラーになる「AR Drone 2」で太陽の塔を撮影してみた - GIGAZINE
Kickstarterの出資総額が1000億円を突破、日本からは7億3000万円・約2万5000人も出資済み - GIGAZINE
ネットで有志から資金を集める「Kickstarter」と「Indiegogo」で圧倒的な差がついていることが判明 - GIGAZINE
・関連コンテンツ







in 動画, ハードウェア, 取材, インタビュー, Posted by darkhorse_log
You can read the machine translated English article Leap from the University of Tokyo to the….