




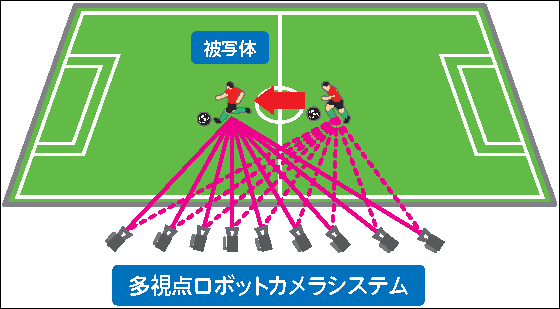
9台のカメラを協調制御して被写体を追う「多視点ロボットカメラシステム」

被写体をいろいろな角度から撮影した映像を「多視点映像」と呼びますが、NHKでは9台のロボットカメラが1つの被写体に向かうように協調制御して、移動する被写体でも多視点撮影が可能なシステムを開発しました。これによって、ドリブル中の選手の姿を横からだけではなくぐるっと周囲から見ることができたり、インテグラル立体テレビで見られる立体映像化することができたりします。
展示項目21 多視点ロボットカメラシステム | NHK技研公開2013
http://www.nhk.or.jp/strl/open2013/tenji/tenji21/index.html

イメージはこんな感じ
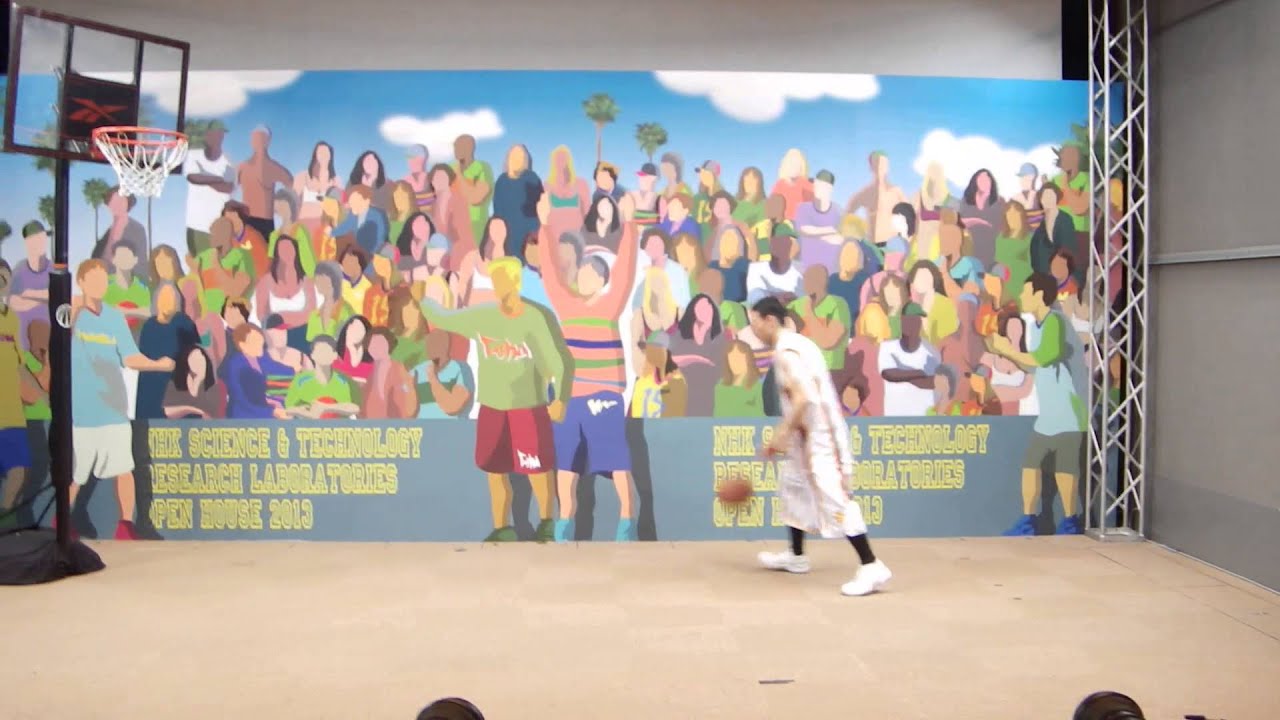
NHK技研公開2013では、この多視点ロボットカメラシステムを使って実際にスタジオでどのように撮影が行われているかを見ることができました。スタジオにバスケットゴールが設置されていて、選手がひたすらレイアップシュートを打ち続けています。
多視点ロボットカメラシステム スタジオ風景@NHK技研公開2013 - YouTube
この選手を追いかけるように、ロボットカメラ9台が設置されています。


どのようにロボットカメラが動いているかというと、こんな感じ。
被写体を追うロボットカメラ@NHK技研公開2013 - YouTube

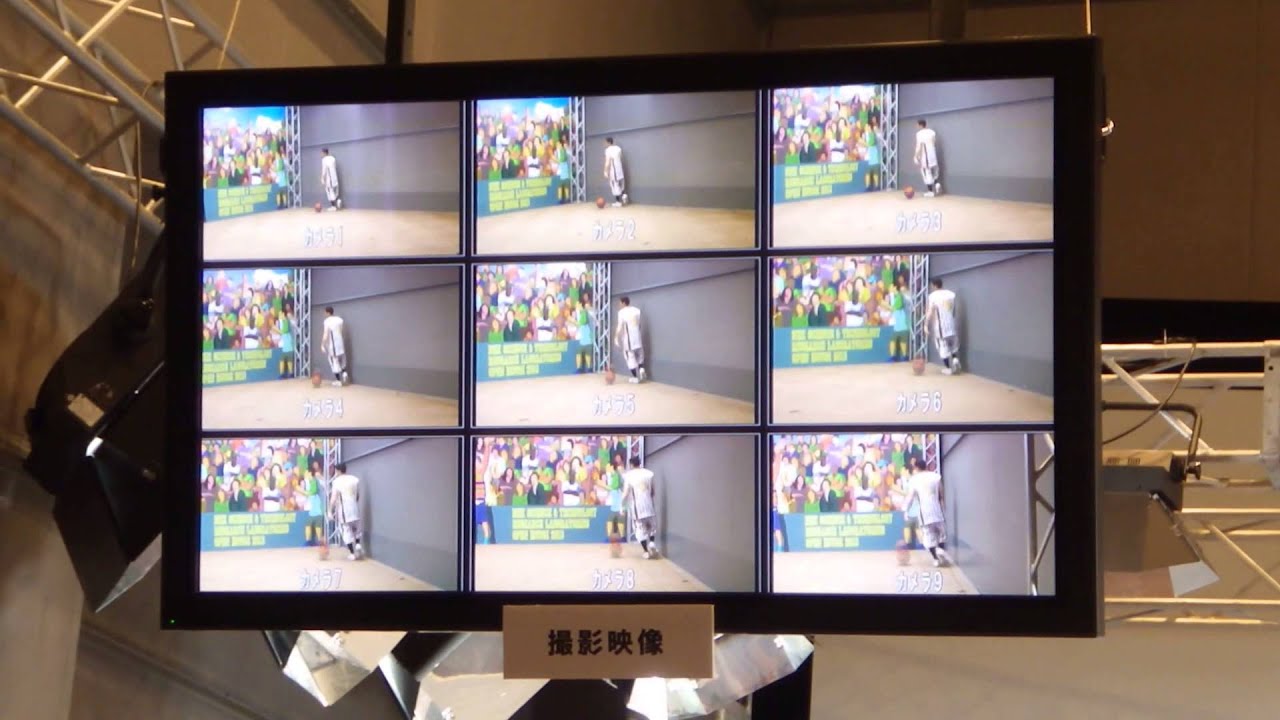
ロボットカメラが捉えている映像はこちら。
多視点ロボットカメラシステムで捉えている映像@NHK技研公開2013 - YouTube
ロボットカメラは協調制御された雲台上に置かれています。

こちらのカメラマンが被写体が中央に来るように、9台のカメラを協調制御しています。

これにより、選手の姿をぐるっと見られる「ぐるっとビジョン」の映像が作れるというわけ。
多視点ロボットカメラシステムの「ぐるっとビジョン」@NHK技研公開2013 - YouTube

・関連記事
NHKが東日本大震災報道に投入していた技術あれこれ - GIGAZINE
スマホから操作して空中撮影を可能にする本格トンボ型ロボット - GIGAZINE
スカイプを使ってカメラの位置や向きを変えられるAndroid用ロボット「Botiful」 - GIGAZINE
遠隔操作で家にいながら学校・職場などに行けるiPad用ロボット「Double Robotics」 - GIGAZINE
・関連コンテンツ








in 動画, ハードウェア, 取材, Posted by logc_nt
You can read the machine translated English article "Multi-viewpoint Robot Camera System" th….