




巨大なボール1つで自由自在に走るバイクを開発

ロボットや乗り物を自作するエンジニア兼YouTuberのジェームズ・ブルトン氏が、1個のボールを動かして360度自由自在に走ることができるバイクを開発するムービーを公開しています。
I built an Omni-Directional ONE-BALL Bike - YouTube

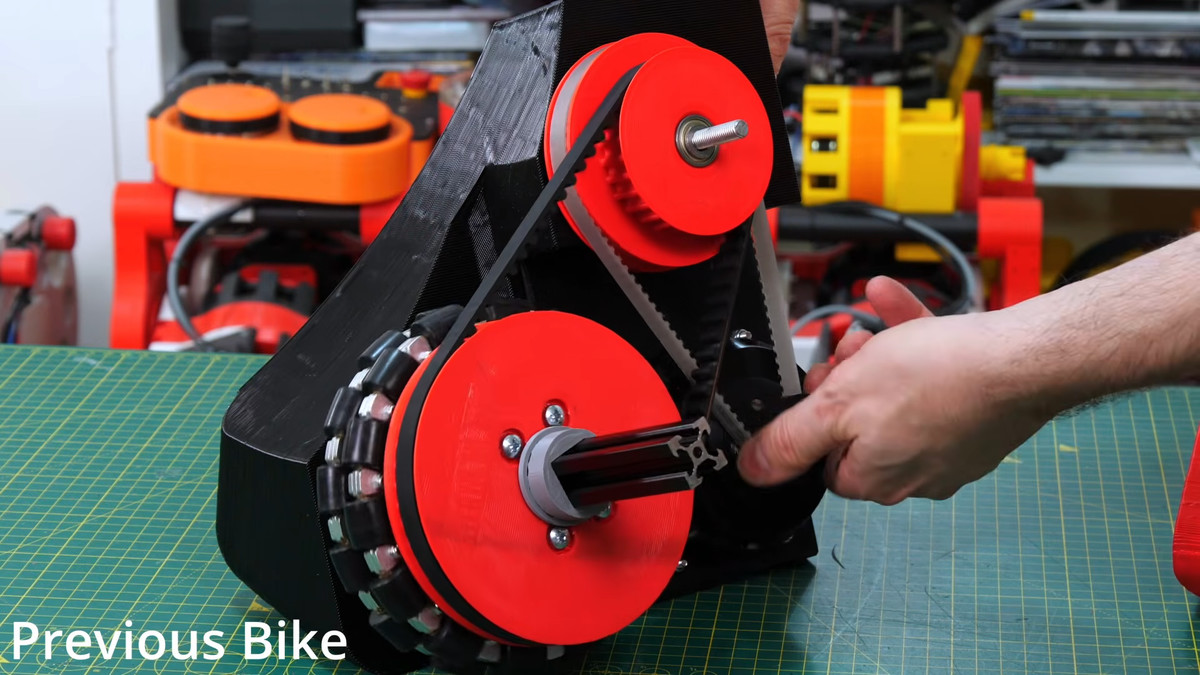
ブルトン氏は球状のタイヤを使ったバイクを以前にも開発したことがあります。これは横方向のバランスをセグウェイのように取りつつ、全方向に移動できる乗り物でした。

1ボール化で特に難しくなるのは操舵です。2ボール機では左右のボールを逆回転させて旋回できましたが、1ボール機ではその方法が使えません。

また、従来の球体バランスロボットで使われる水平向きオムニホイールは高速時に小ローラー同士が干渉しやすいため、ホイールの向きや構成を見直す必要があります。

操舵も大きな問題です。2ボール機では左右のボールを逆方向に回せば旋回できましたが、1ボール機ではその方法が使えないため、別のステアリング手段を考える必要があります。

一般的な球体バランスロボットは、オムニホイールの面が地面側を向く構成が多く、高速時に小ローラーが過負荷になって互いに干渉しやすい問題があります。2ボール機ではホイールを90度回して面を縦向きにしたことで、高速応答は改善したものの、その場で回転しにくくなるトレードオフがありました。また、市販のオムニホイールでは小ローラーが真鍮ブッシュで回っており、長時間使うと摩擦熱でゴムが柔らかくなり、グリップ低下を起こすとのこと。
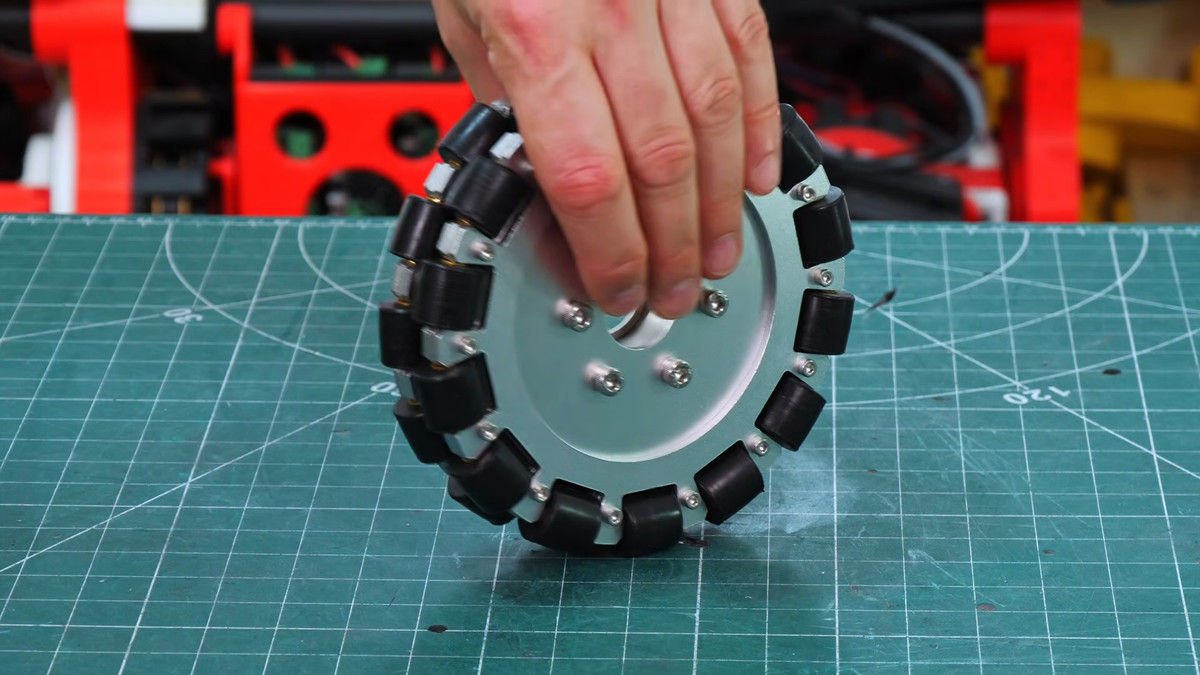
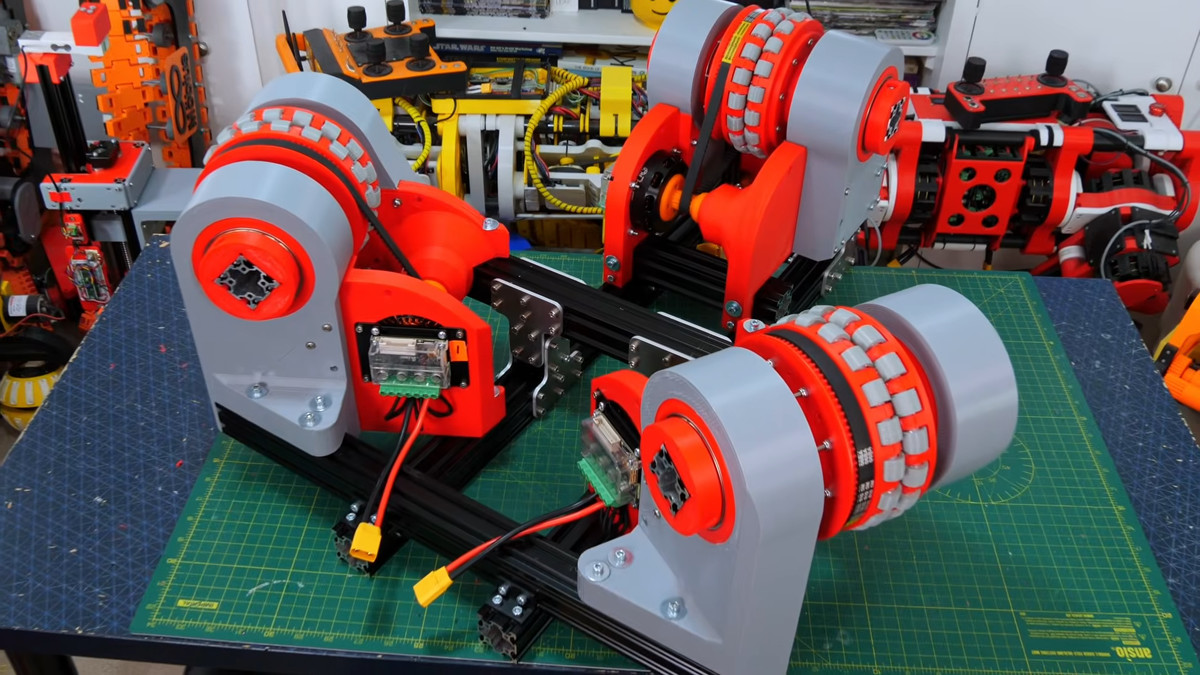
そこで今回は、小ローラーにベアリングを入れた自作オムニホイールを新規製作します。
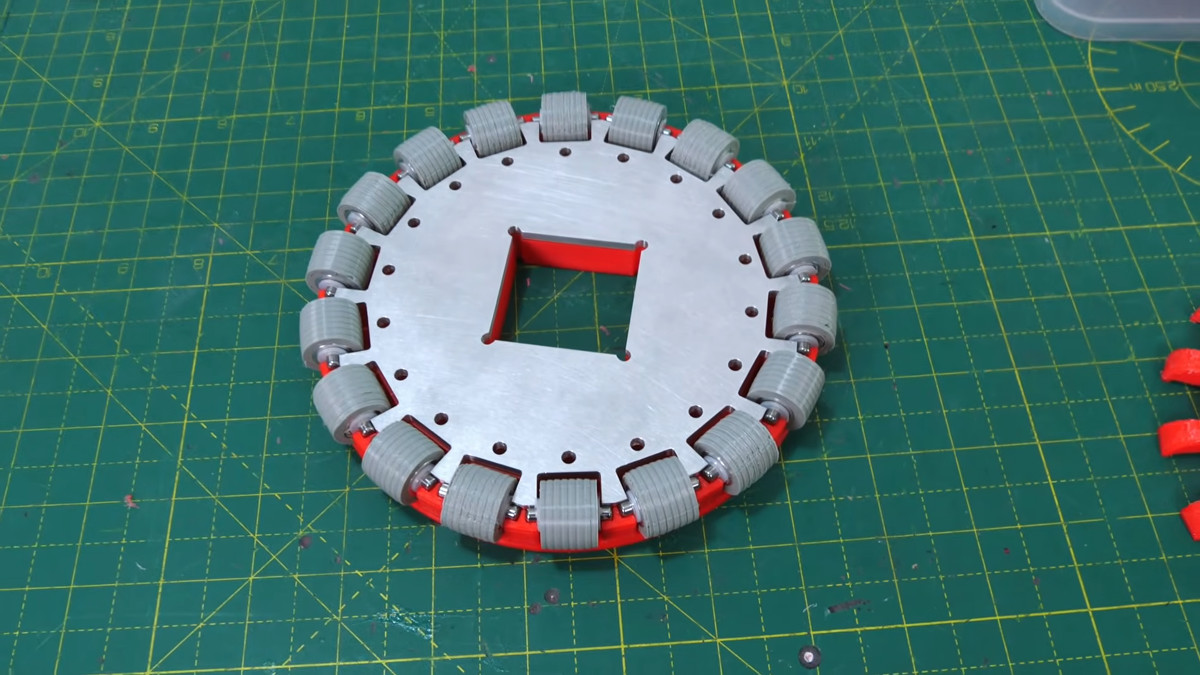
自作ホイールは、各大径ホイールに2列x18個の小ローラーを配置した構成です。小ローラー1個につき両端ベアリングを使うため、3輪分で合計216個のベアリングという非常に大がかりな設計になっています。

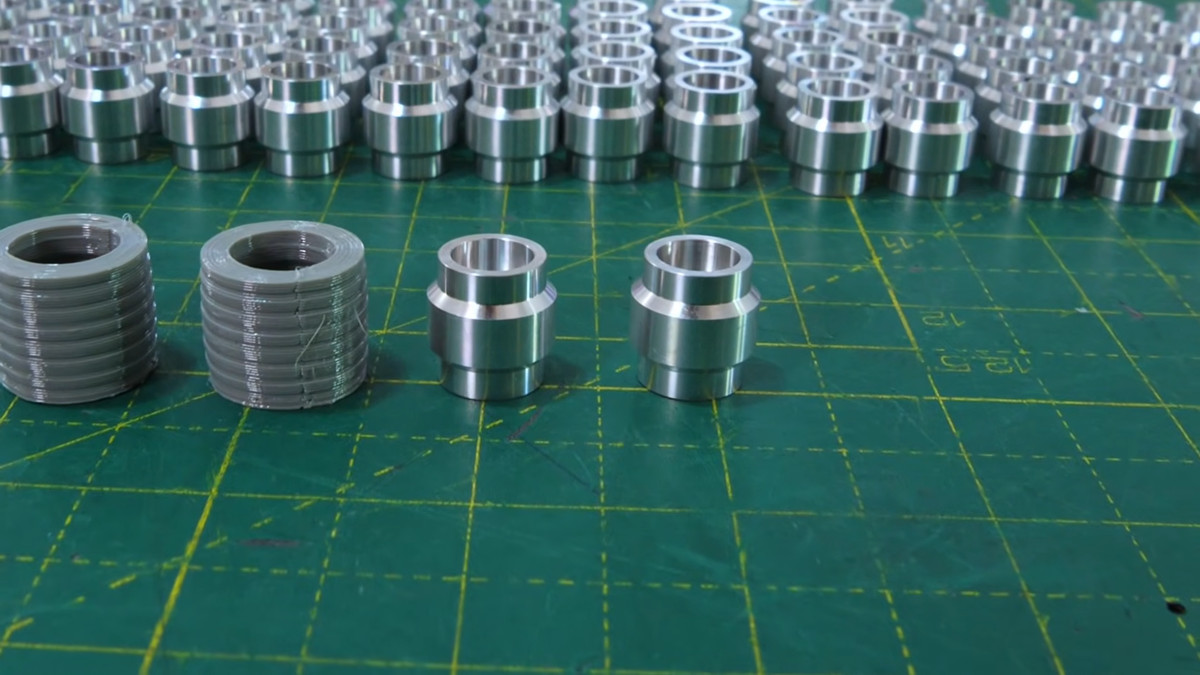
小ローラーのタイヤはTPUで3Dプリントしつつ、芯材は最終的にアルミで特注しています。タイヤと芯材は噛み合うプロファイル形状で、きつい嵌(かん)合によりズレにくくしている点も工夫です。
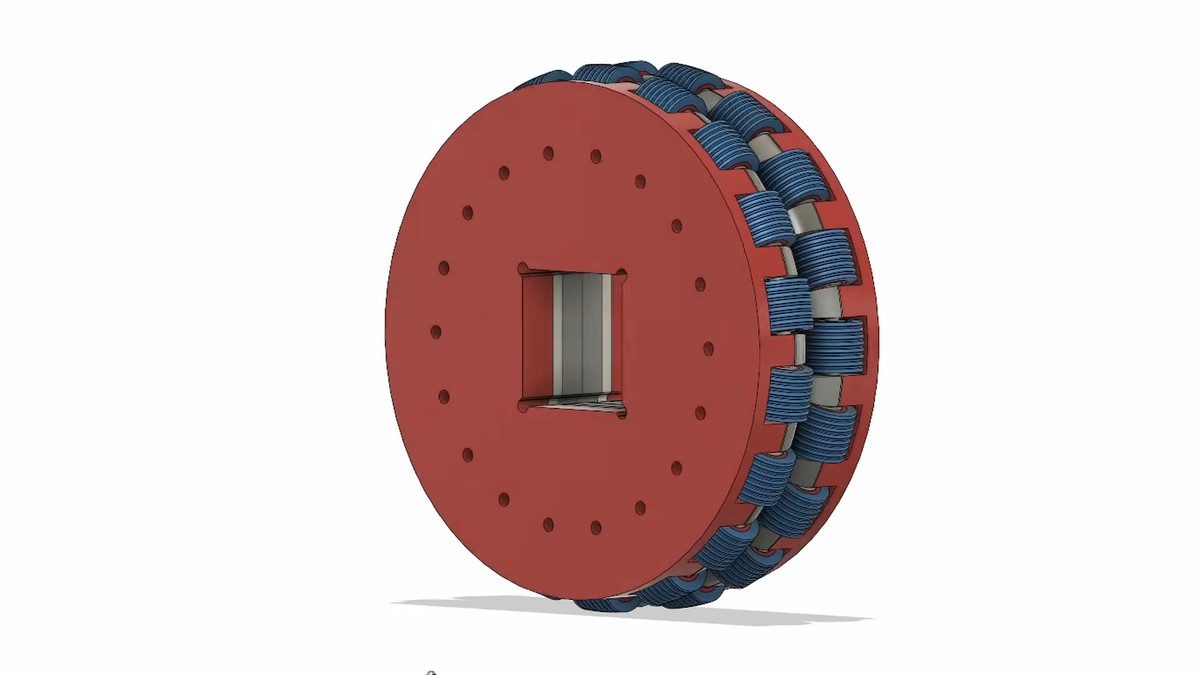
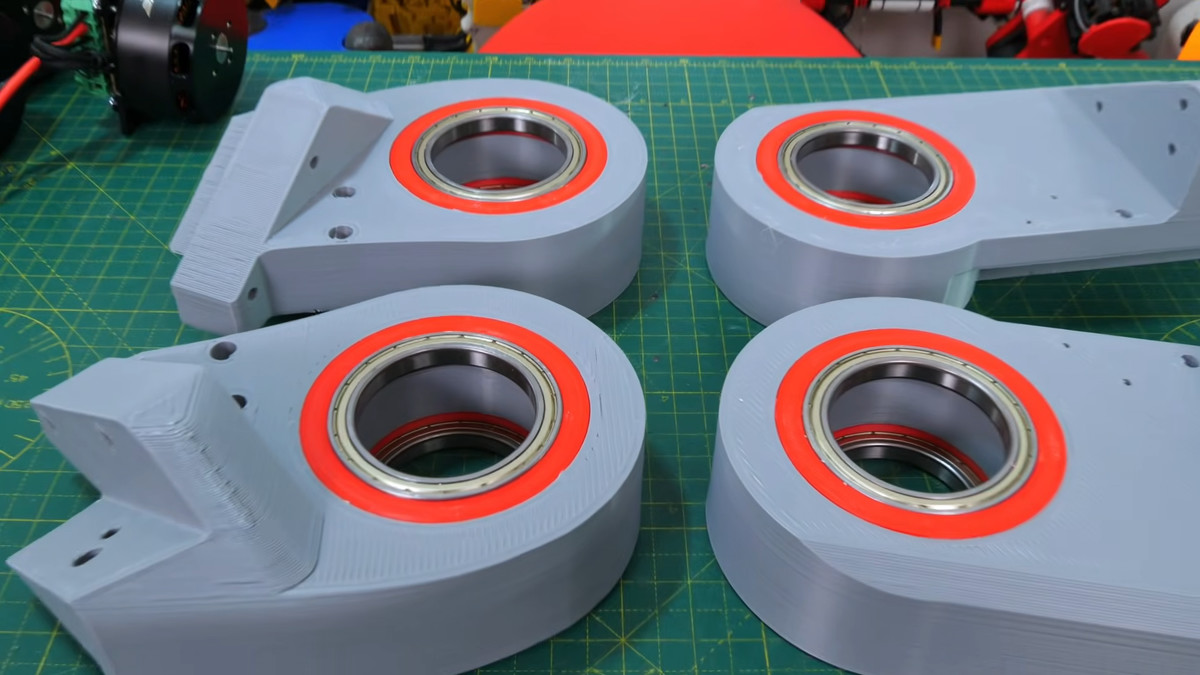
全体構造は、アルミ芯で軸荷重を受け、3Dプリント部品は主に位置決めや保持を担うハイブリッド構造です。加工コストを抑えながら、荷重の大きい部分だけ金属化する合理的な設計になっています。
組み立てるとこんな感じ。
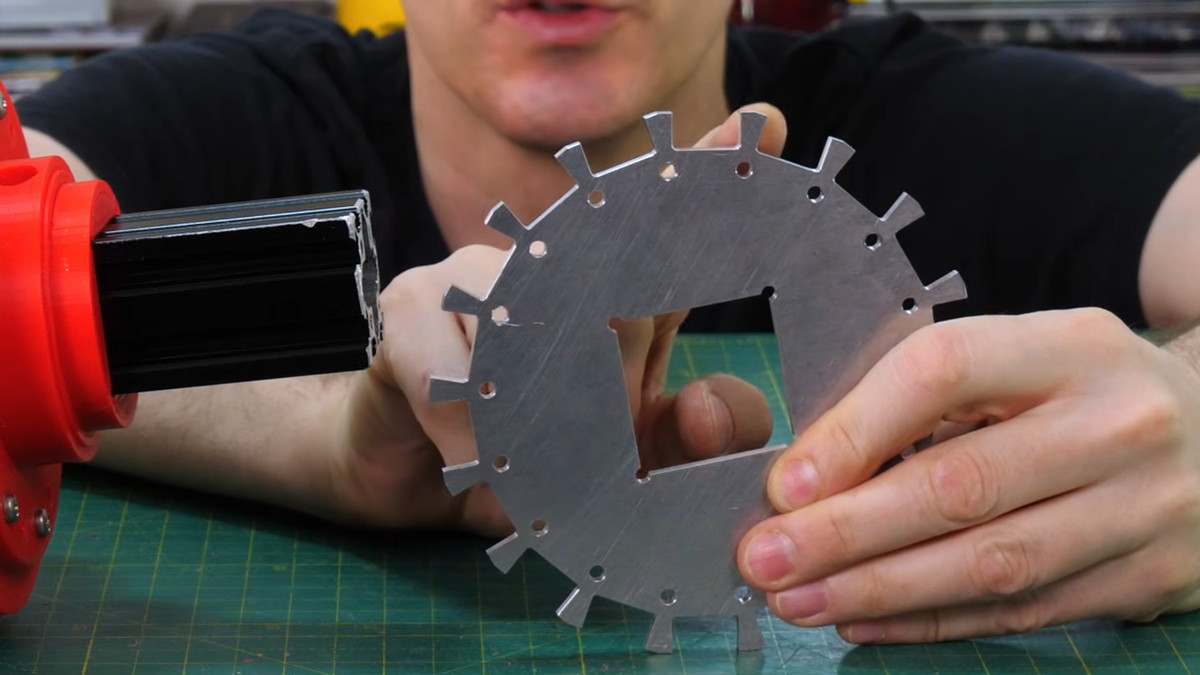
ブルトン氏は、6000系アルミ4mm厚とPLA部材で体重と車体重量を支えられるかは実際に試してみないと分からないと述べました。
特に、オムニホイール特有の切り欠き形状は薄肉部に応力が集中するのではないかという懸念があるとのこと。
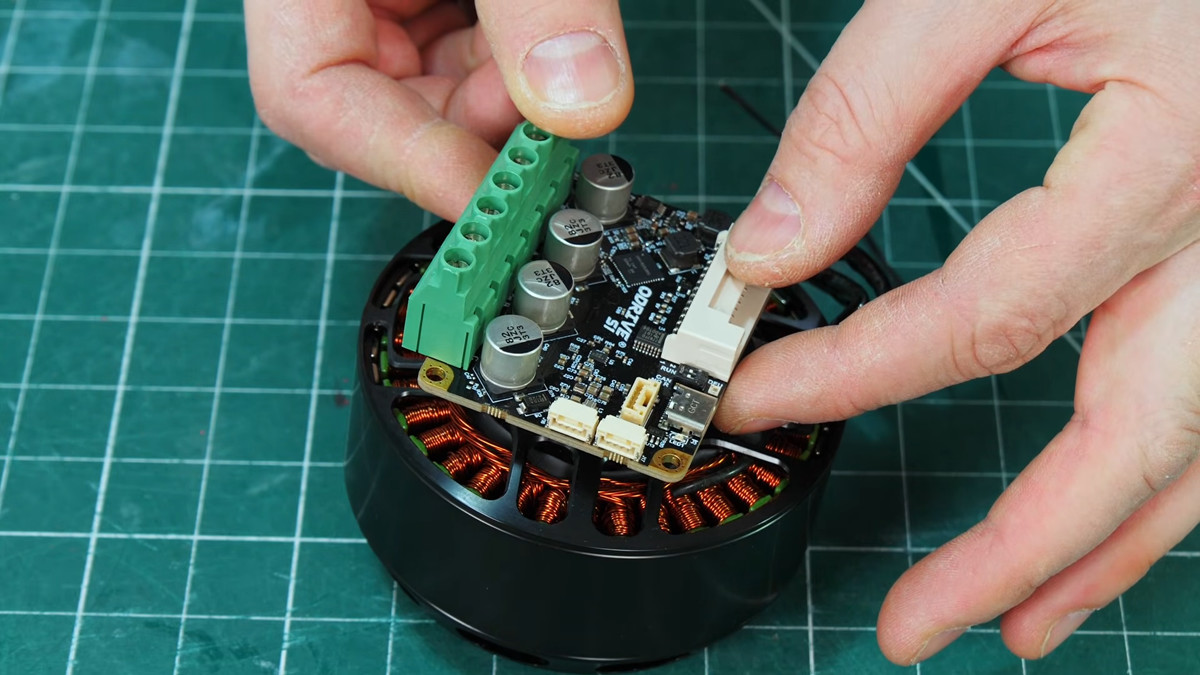
駆動系にはOdrive系のブラシレスモーターキットを3基採用し、各モーターは最大2kW定格です。モータードライバー、磁石、エンコーダがまとまった構成で、実験機として組みやすい構成が使われています。
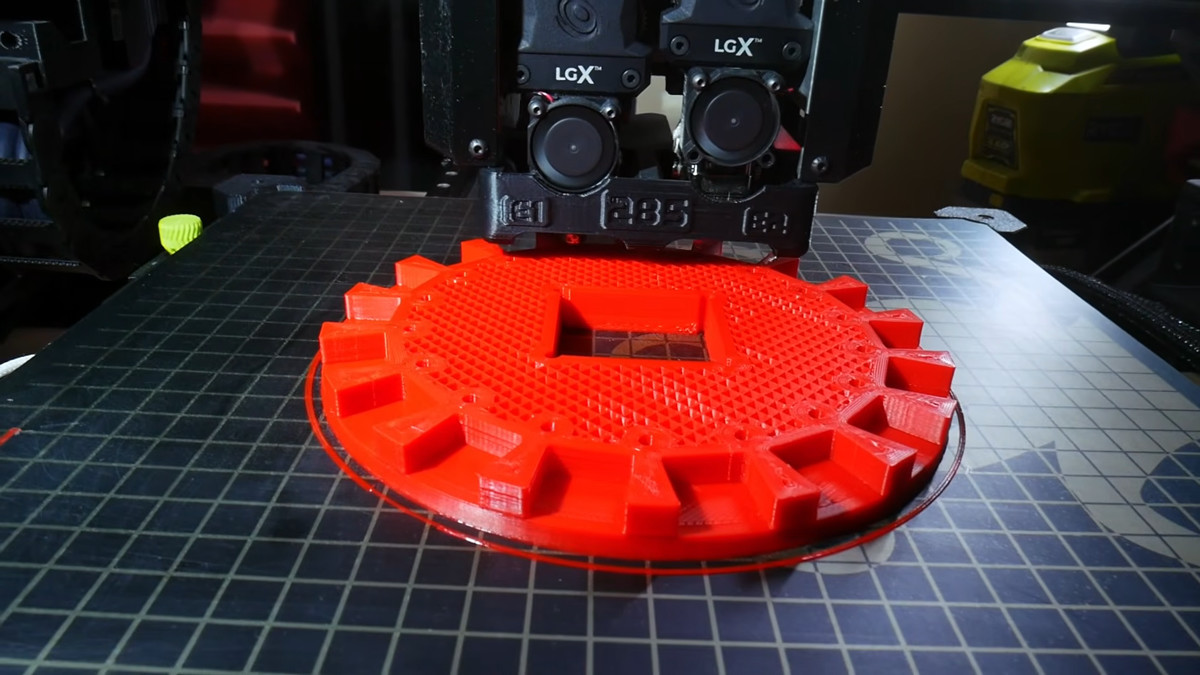
モーターマウントや軸受け周辺は、Polymax PLAを使って大径ノズルで肉厚に3Dプリント。
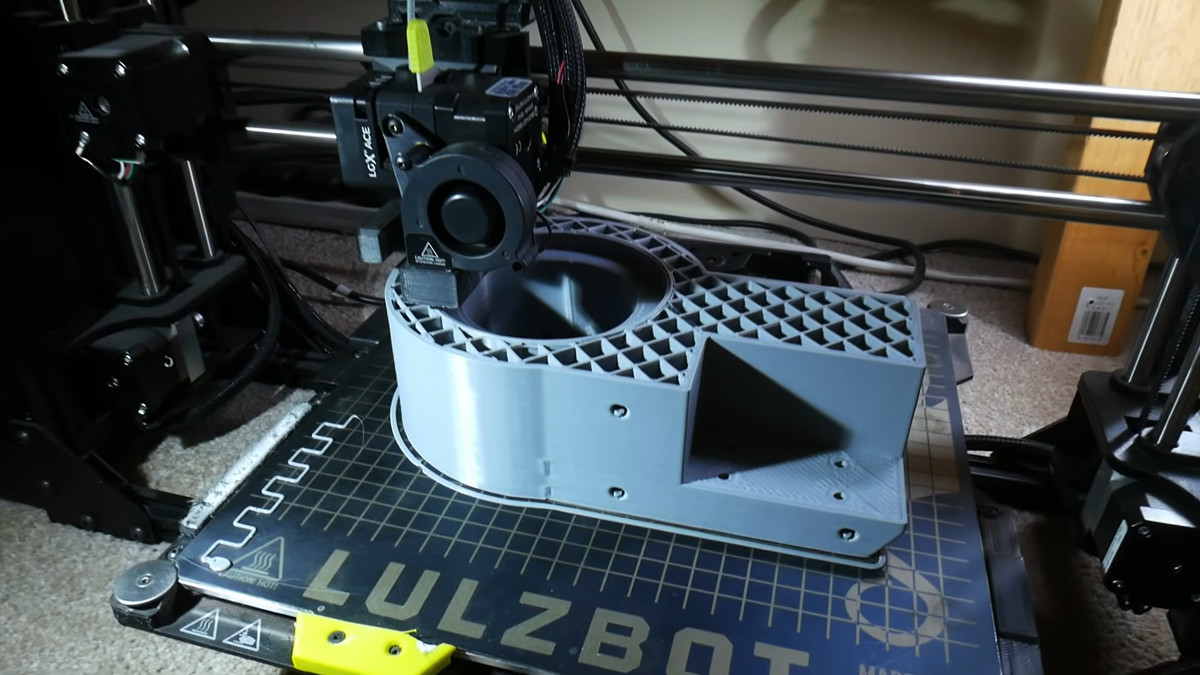
細かい公差が必要な箇所は別パーツ化して細いノズルで作り、再印刷の手間や調整コストを減らす設計になっています。
プーリーや軸の固定部にはセルフタッピングねじを積層方向に打ち込み、3Dプリント部品の割れ対策も入れています。
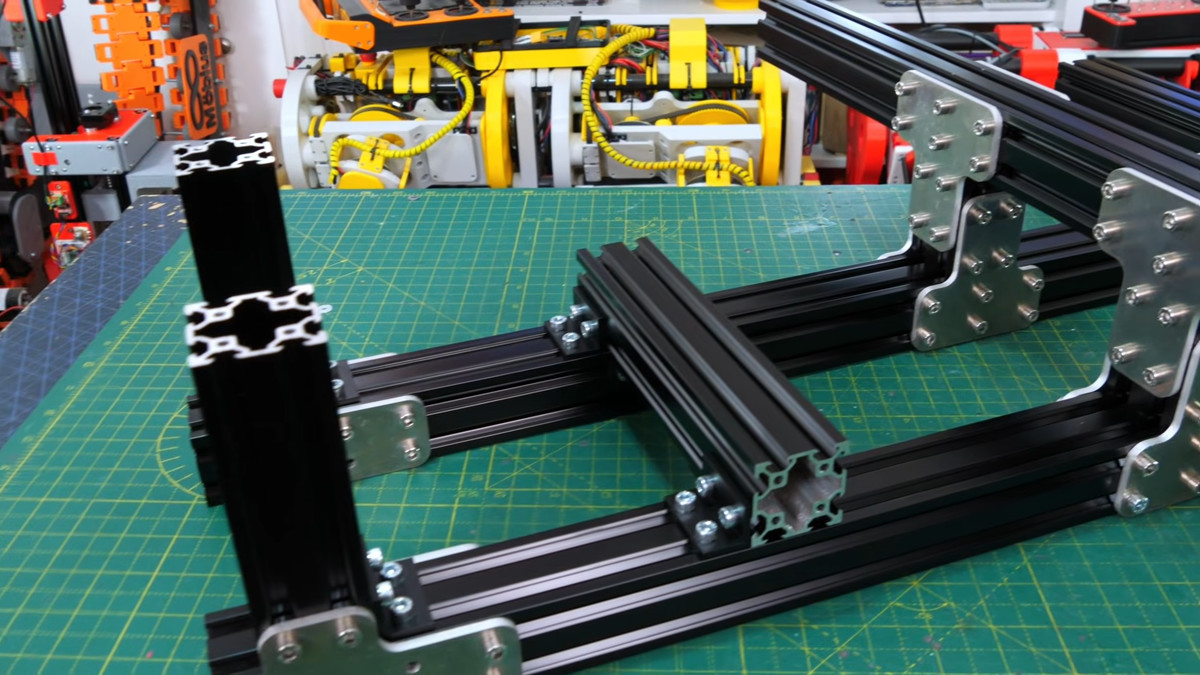
シャーシは4040アルミフレームで箱型に構成され、Tナットとブラケットで組み立てる方式です。溶接鋼フレームより製作性が高く、十分な剛性も得られるため、試作機に向いた構成として採用されました。
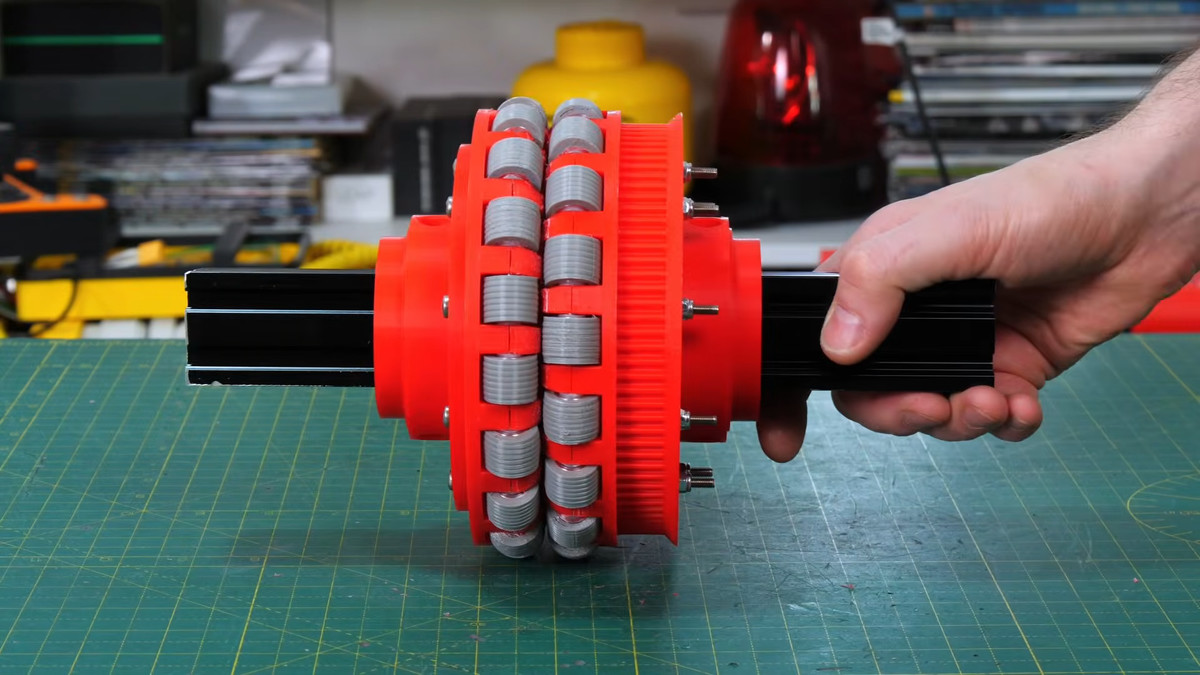
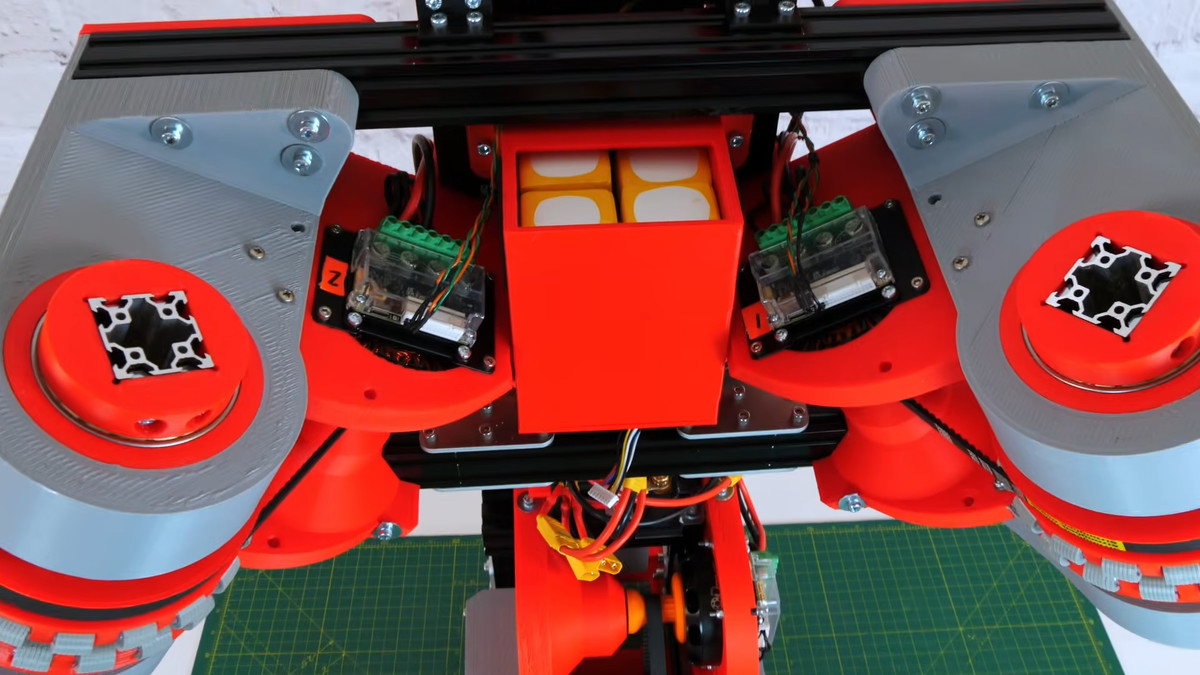
3つのホイールをシャーシに固定するとこんな感じ。
組み上げ後は、ボールを手で回しながら3つのホイールの回転関係を確認。

乗車姿勢の検討では、安全に降りやすく重心も中央に寄せやすいよう、前傾のスポーツバイク風レイアウトが有望と判断されました。

シャーシの後方には足置きとなるペダルも装着されます。

電源は6S LiPo×6本。

このLiPoを直列ペアで約50Vを作って並列化し、大電力系を構成します。低電圧系は別電源とレギュレーターで分離し、Teensy 4.1、IMU、CANトランシーバーを搭載。
緊急用の停止ボタンとイグニッションボタン。

さらに静電気対策としてケース内面に導電性スプレーを施しています。

制御アルゴリズムはPIDで、今回はロールとピッチの2軸を同時に安定化します。

初期搭乗テストでは、機体は予想以上に安定して体重を支え、前後・左右ともに動かせる見込みが立ちました。ただし、まだハンドルやフットペグがなく操作性は不十分ですが、「成立しそう」という手応えが得られる段階。

その後、体育館での試運転では、左右ハンドルにホールセンサー式ツイストグリップを追加し、前後用と左右用の目標角セットポイントを操作できるようにします。前後は約±10度の範囲でバランス角を変えて加減速やブレーキ補助に使う想定。

前進しながら横方向のセットポイントを変え、機体をバンクさせて旋回します。「傾いて曲がる」感覚が重要だとのこと。

ただし、体重移動にコツがいるため、細かい操作はまだ難しい模様。ブルトン氏は「速度はかなり出るものの、最高速限界に達した感覚がなく、恐怖感はかなりある」とコメント。

さらに突然バイクが一時停止してしまい、転倒してしまう事態も発生。

ボールのヨー方向が非常に軽く回ってしまうことから、仮にモーターで回そうとしても十分なトラクションが得られず、止めたり向きを維持したりしにくいと考察したブルトン氏。今度は木材と発泡材をホットグルーで付けた大きな「舵面」を追加し、風圧で機体を回す実験を行います。見た目はかなり即席ですが、実際に多少向きが変わり、軽い機体ゆえに小さな力でも効果が出ました。

しかし、やはり途中で突然一時停止してしまう問題があり、ブルトン氏は入念なシールド対策はしているものの、過去の経験からやはり「大きなプラスチック球と摩擦の組み合わせによる帯電」が原因ではないかと疑っています。

・関連記事
独自開発した金属回収装置で街を走り回ってタイヤをパンクさせるクギやネジを回収する善意の男「アトランタ・マグネットマン」 - GIGAZINE
アメリカ空軍が60年以上前に開発した巨大ロボット「ビートル」とは? - GIGAZINE
ホンダがバランス制御技術によって低速でも自立するバイク「Honda Riding Assist」を公開 - GIGAZINE
近未来を体現したスマートなバイク「Tron Lightcycle」 - GIGAZINE
全長16kmで地平線を実感できる直線道路「猿払村道エサヌカ線」を走ってみた - GIGAZINE
・関連コンテンツ






in 動画, ハードウェア, 乗り物, Posted by log1i_yk
You can read the machine translated English article A bike that can move freely using a sing….