




人間の指示なしにロボットが自分で動いて学習できるアルゴリズム「Grasp2Vec」をGoogleが発表
AIを搭載したロボットが自分で動いて物体を認識し、自身の関与によってどのような結果が導かれるのかを学習可能なアルゴリズム「Grasp2Vec」をGoogle AIが発表しました。
grasp2vec
https://sites.google.com/site/grasp2vec/
Google AI Blog: Grasp2Vec: Learning Object Representations from Self-Supervised Grasping
https://ai.googleblog.com/2018/12/grasp2vec-learning-object.html
AIが機械学習を行う際には多くの場合、人間による何らかの関与が必要です。対象となる物体をあらかじめラベリングしておくことでAIが対象物を認識できるようにしたり、AIに「これを行えば正しい」ということを覚えさせるために何らかのリワード(報酬)を与えることでAIに実装された報酬系を刺激したりなどの行為が必要とされることがありますが、これらの手間は学習の効率性を高める上において少なからず障害となっています。
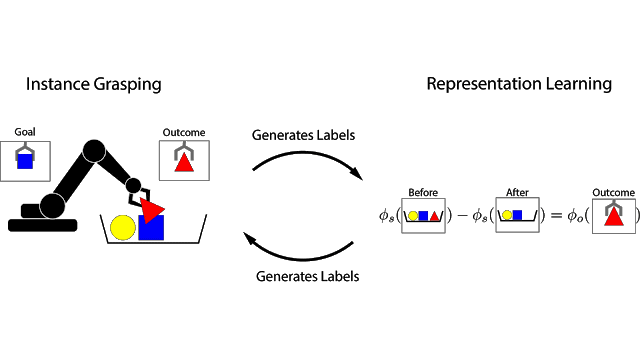
Google AIが発表したGrasp2Vecは、ロボットアームに「何かを拾うという試みがいくつかの情報をもたらす」という直感を持たせ、物体をアームで持ち上げた前後の変化を認識させることで、あらかじめ与えられた「正解」に近い結果を出すための道筋を学習させるというもの。人間が「正解」だけを与えておけば、ロボットが自分の行動とそれによってもたらされる結果を自己判定し、より精度の高い方法を自己学習します。その様子は以下のムービーで垣間見ることが可能。
Grasp2Vec: Instance Grasping - YouTube
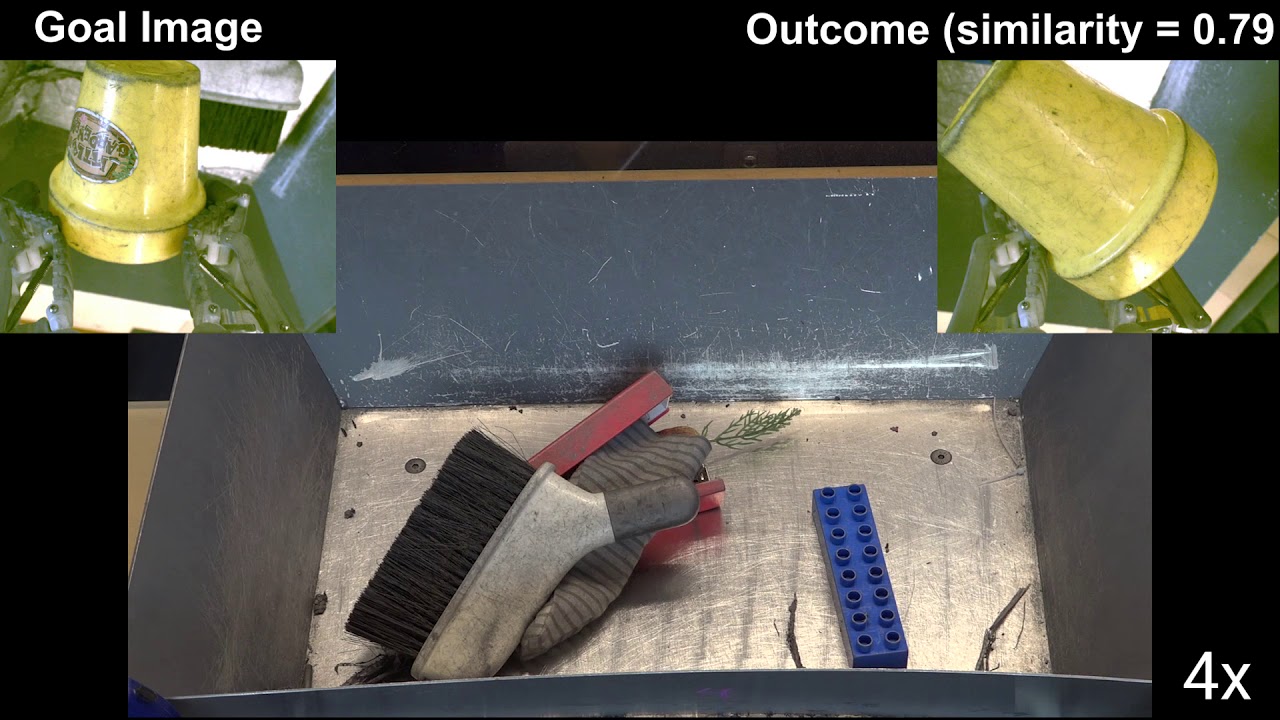
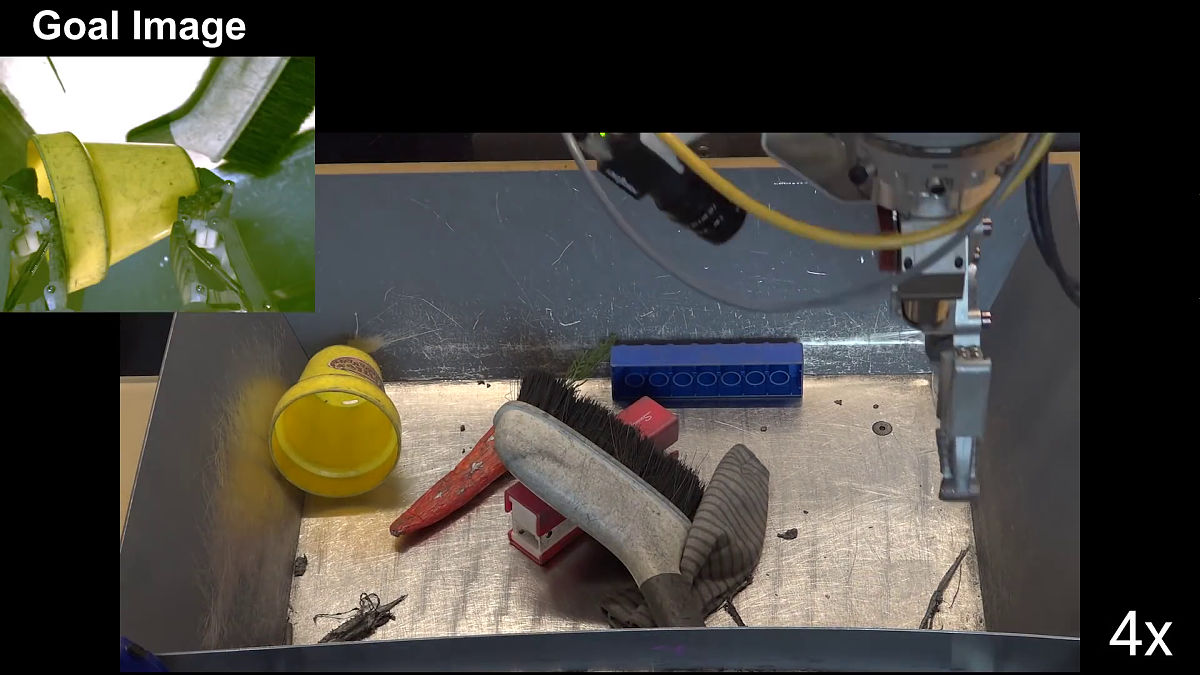
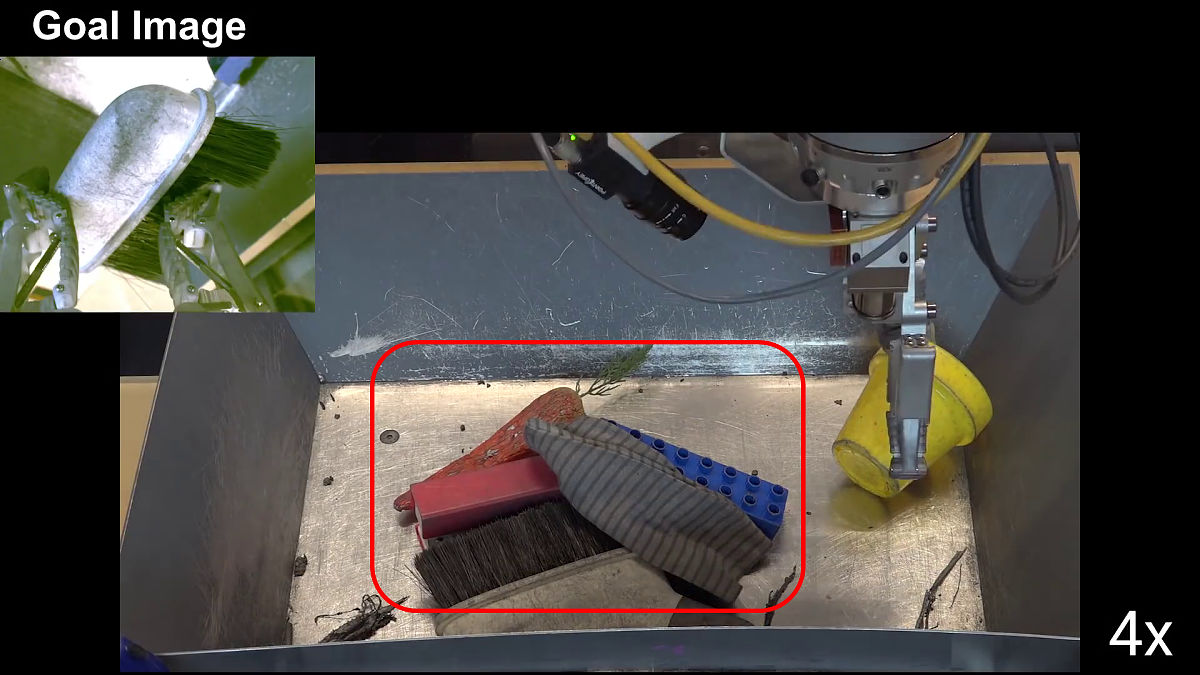
ロボットは以下のようなフィールドの中におかれた物体をアームでつかみ、示される正解により近い結果を出すよう求められています。AIにはあらかじめ、画面左上のような「ゴール」のイメージが与えられています。

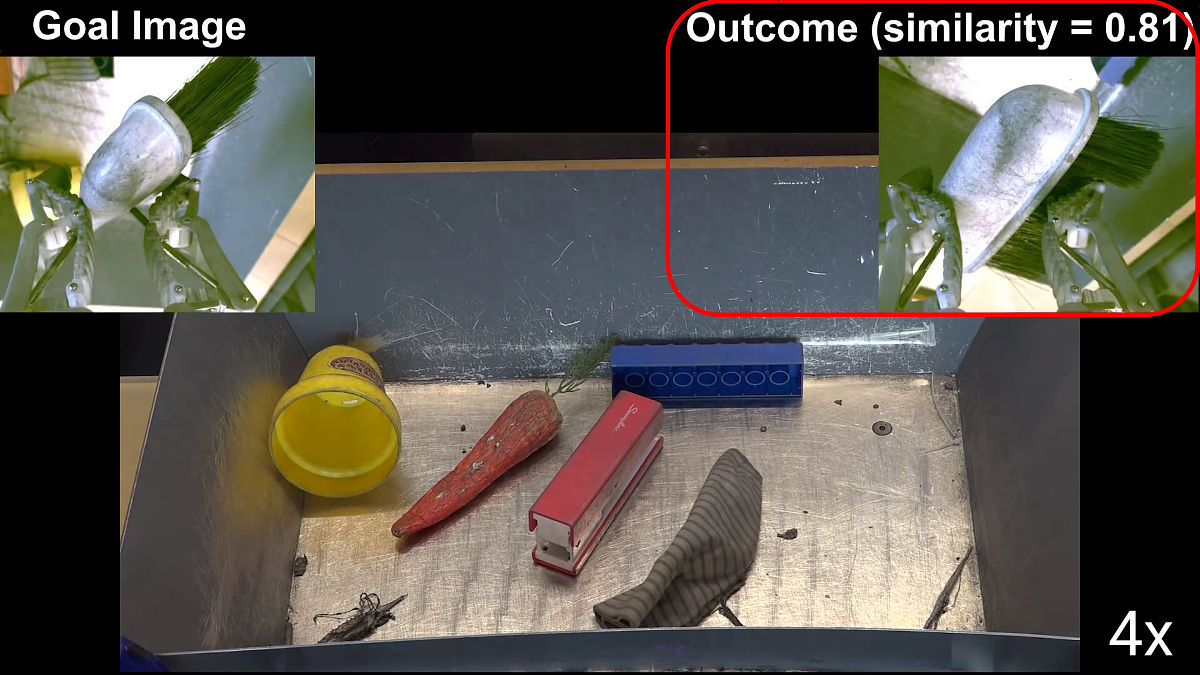
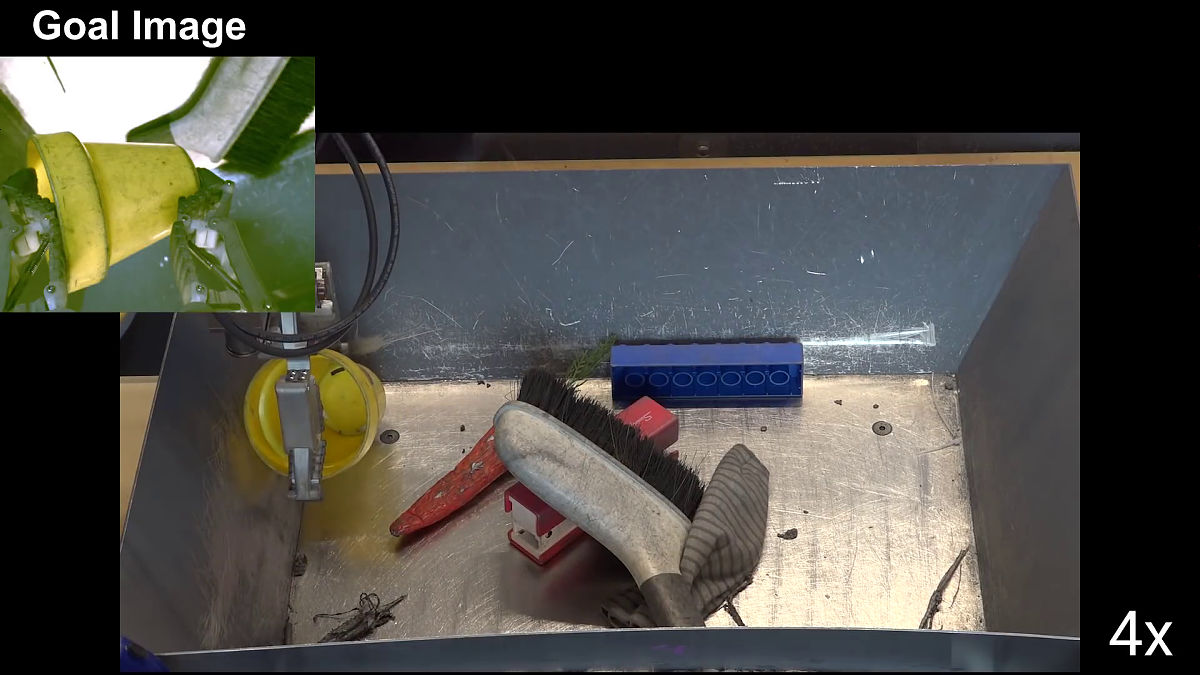
ゴールイメージが「ブラシ」であることを認識したAIがアームを動かしてブラシをつかむと………
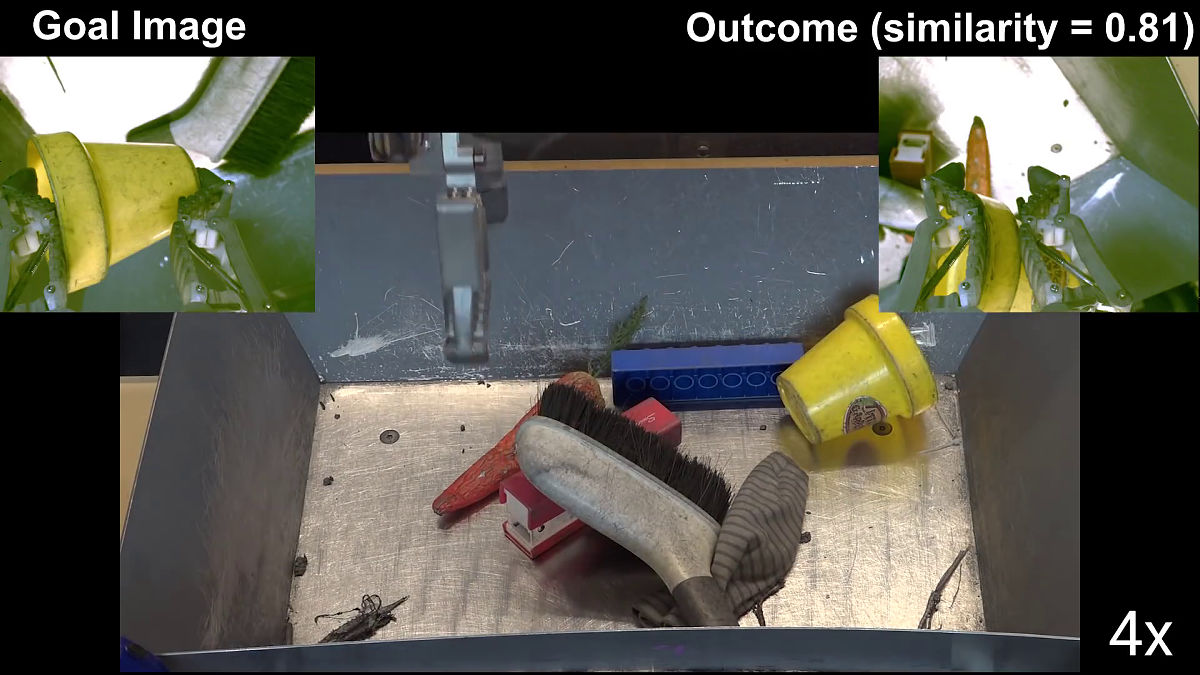
結果のスコアは「類似性:0.81」というもの。スコアが「1」になると完全に一致と考えられるため、かなりゴールに近い状態が作り出されています。
次は、黄色い植木鉢を高さ方向につかむというのがゴールイメージ。
アームの先端を広げてグッとつかむと……
またもやスコアは「0.81」と高得点。
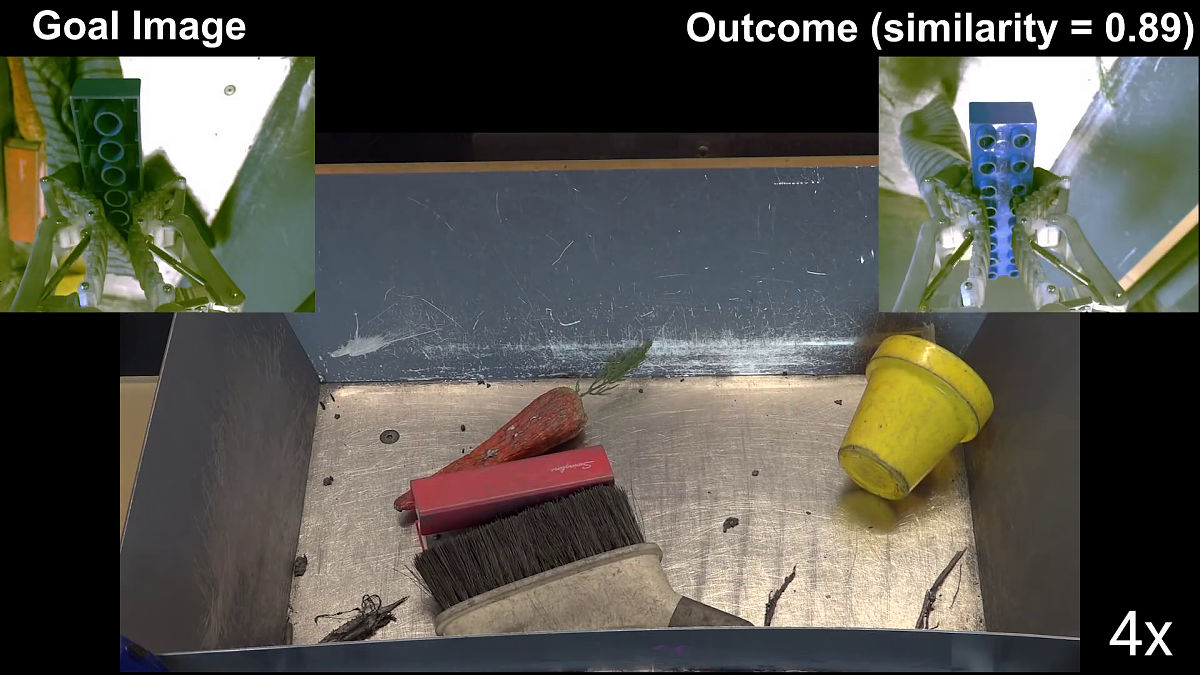
オモチャのブロックをつかむときには、0.89というスコアを記録しています。
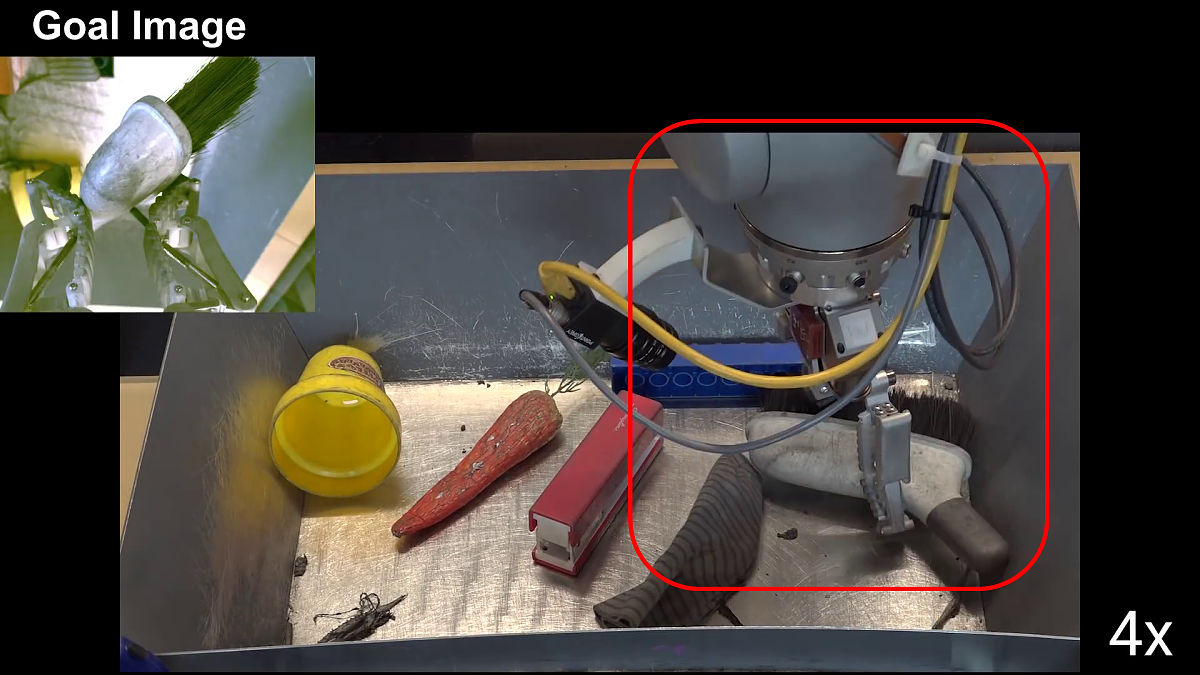
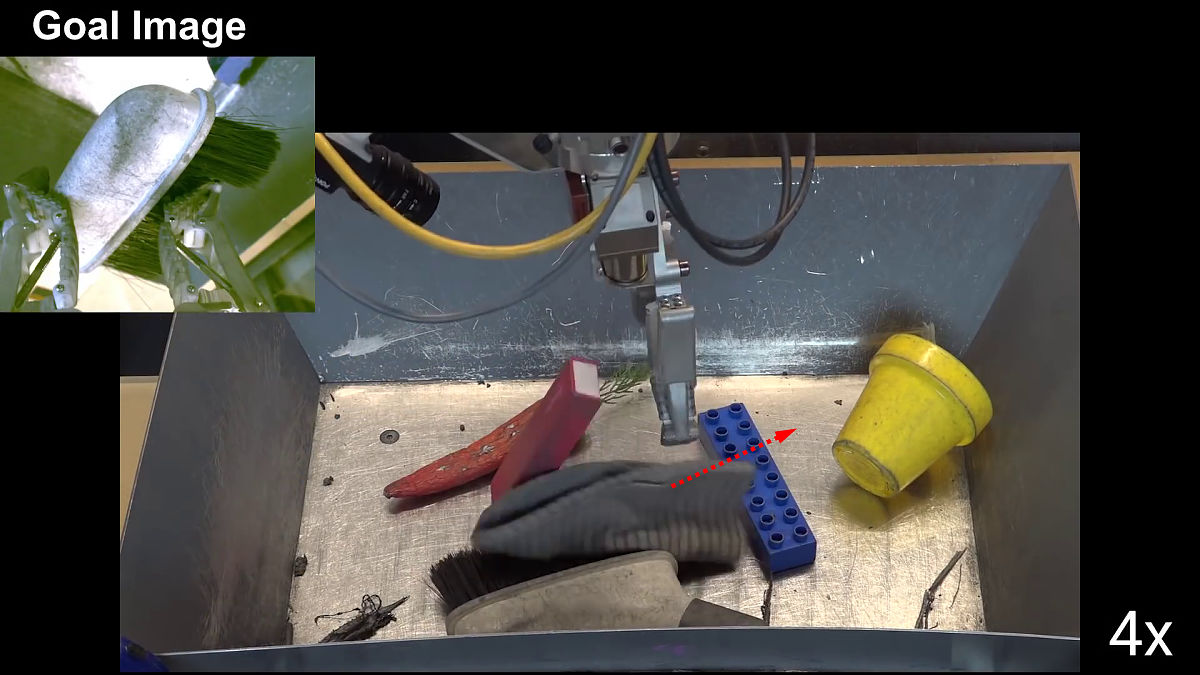
このように、目的のオブジェクトを邪魔するように物体がおかれている場合でもOK。
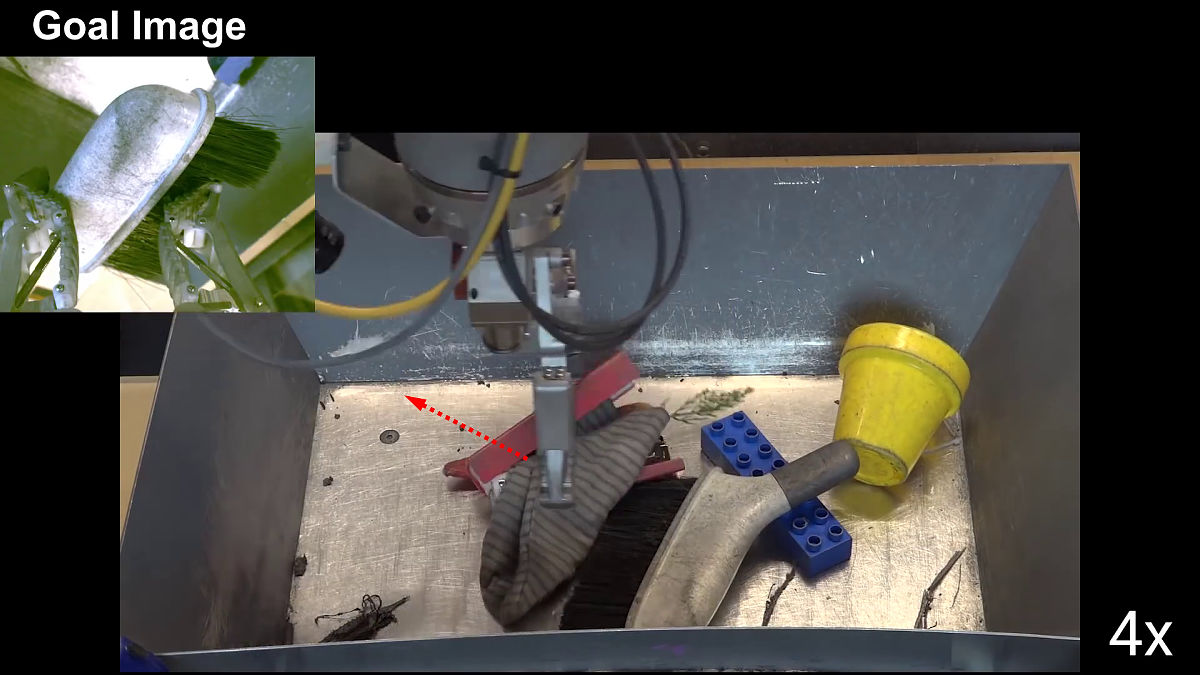
アームを使って邪魔な物体を動かし……
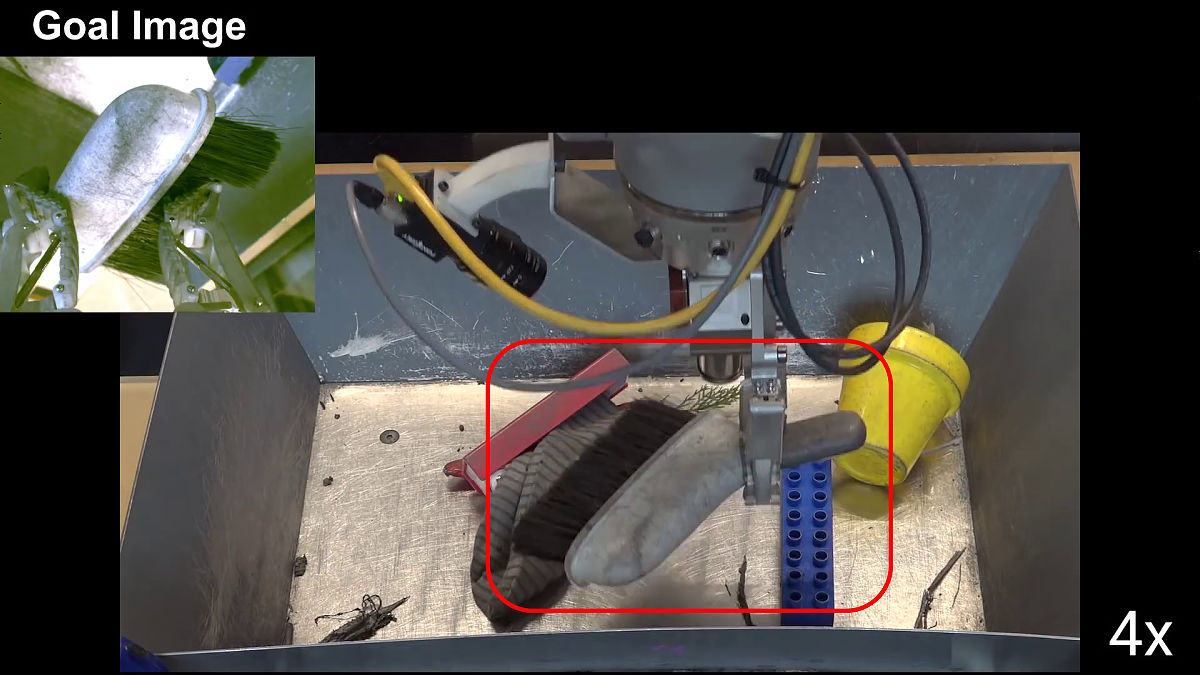
障害物を取り除くことで………
目的のオブジェクトをキャッチできました。
Google AIではこのアルゴリズムを用いることで、幼児が物体の動かし方を覚えるようにAIが自分で何かを動かして結果を学習できることを実現しています。この技術がさらに進歩すると、AIが学習を行うスピードがこれまで以上にアップすることも考えられます。技術の詳細は、Google AIが発表した論文で確認することが可能です。
[1811.06964] Grasp2Vec: Learning Object Representations from Self-Supervised Grasping
https://arxiv.org/abs/1811.06964
・関連記事
コンピューターが人間を超える「AI」「ディープラーニング」「機械学習」とは何かについて解説する「Machine Learning 101」 - GIGAZINE
14台のロボットアームに分散自己学習させて人間が数年かけて覚える動作を爆速で経験して身につけさせる恐るべきムービーをGoogleが公開 - GIGAZINE
Google「DeepMind」の人工知能は赤ん坊のように「触って覚える・判別する」能力を学習したとの発表 - GIGAZINE
「エネルギー関数」を用いてコンピューターに概念を機械学習させる - GIGAZINE
DeepMindが「前進せよ」という指令だけで自分で学んで不気味な動きで突き進むAIフィギュアのムービーを公開 - GIGAZINE
・関連コンテンツ







in 動画, ソフトウェア, Posted by darkhorse_log
You can read the machine translated English article Google announces an algorithm 'Grasp 2 V….