I tried lifting a can juice by manipulating desktop-sized minirobo arm "uArm" freely with a mouse from a PC Review

Desktop-sized miniature robot arm that can be steered with a mouse or a smartphone "UArm"Is a cloud funding siteKickstarterIt was delivered to the GIGAZINE editorial department across the sea with a burst of just 4 months since the project was a big success, so I piloted quickly.
UFactory | Home
http://www.ufactory.cc/
◆Appearance check
UArm arrived in brown corrugated cardboard.

When you open the inside the cushioning material of the sponge is laminated and the care against the impact is solid.

The first layer looks something like this.

Removing the first layer ... ...

The uArm main body was contained in the second layer.

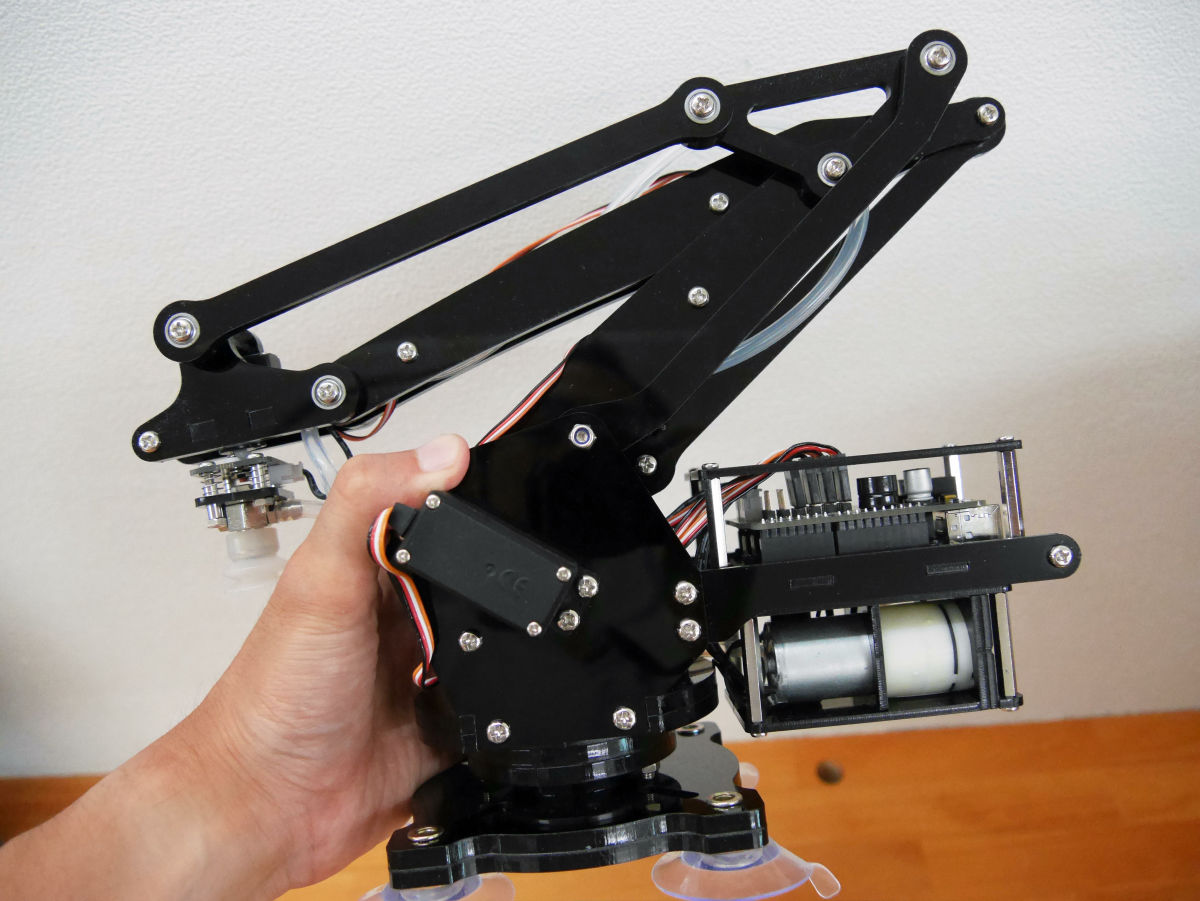
UArm is a size that can be held with one hand, but the rigidity of the 5 mm thick acrylic frame is high and the main body is heavy weight, and the child's heart is tickled by anything mechanical mecha looks.
Inside the box were uArm main body · parts for gripper · driver · AC adapter · USB cable was included.

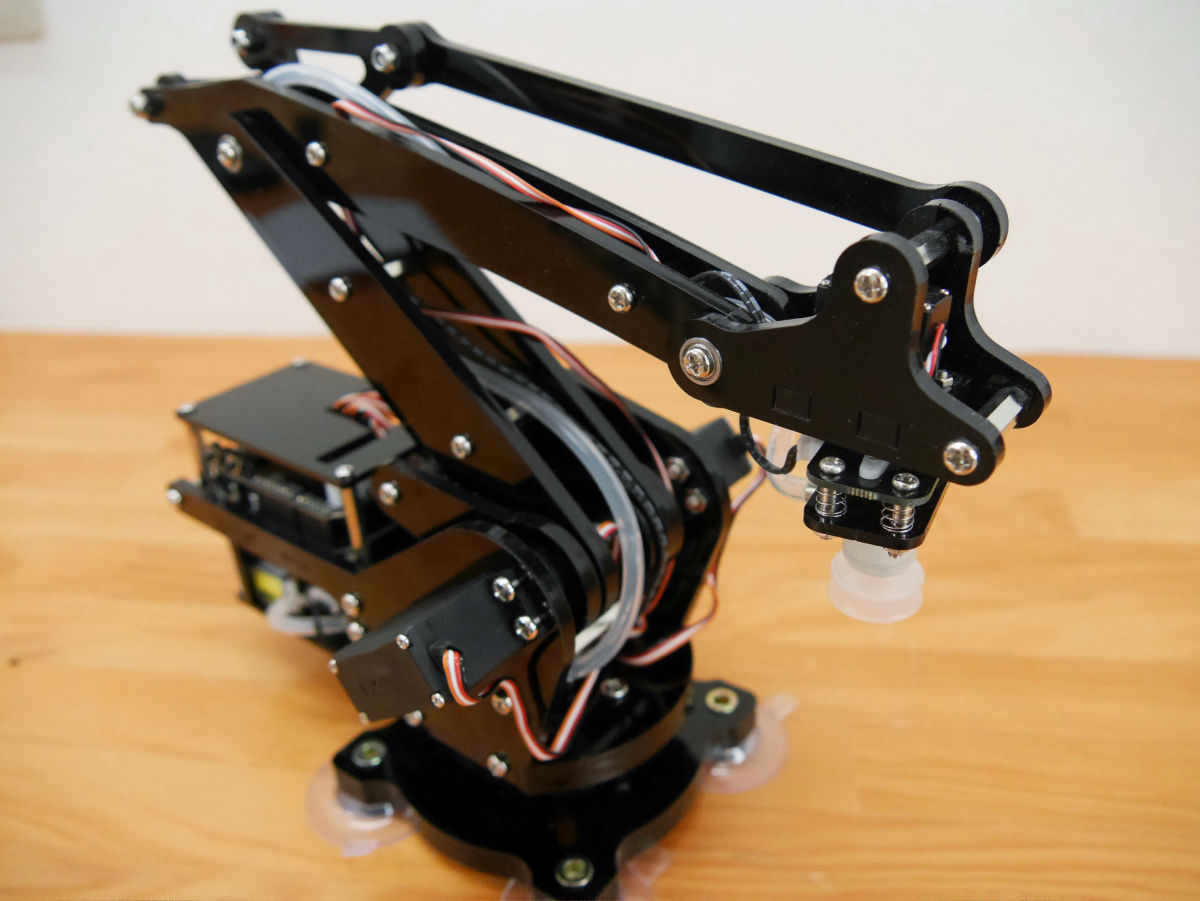
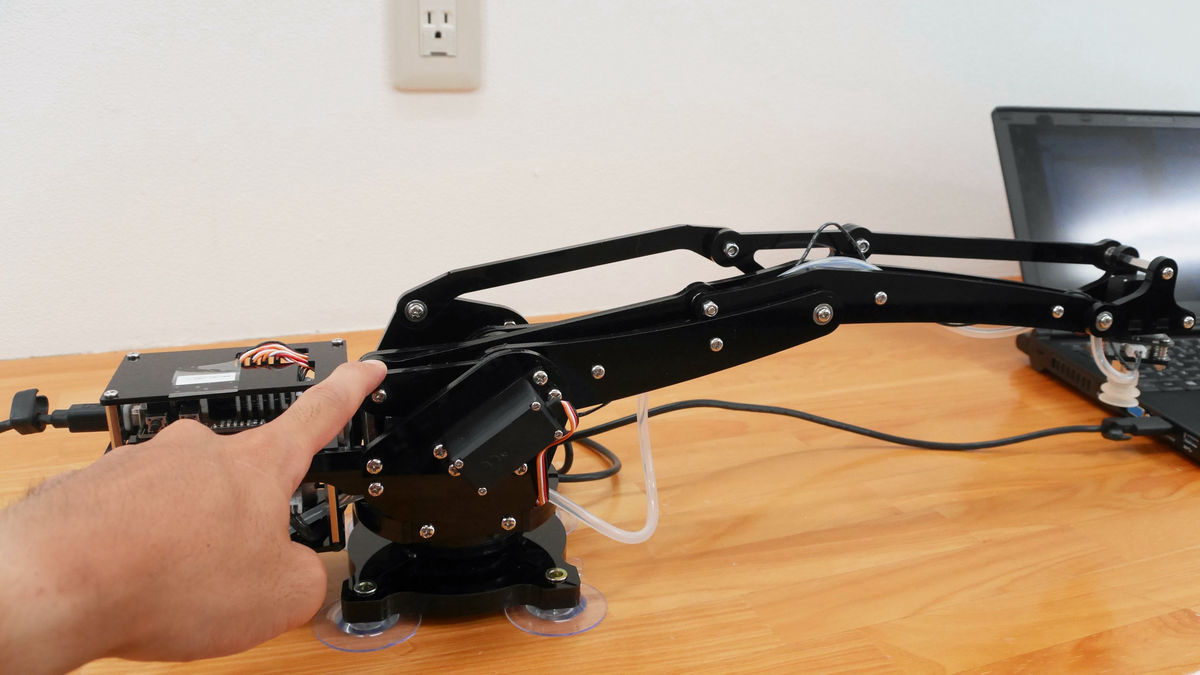
When placing uArm on the desk, the overwhelming presence of the blackened frame.
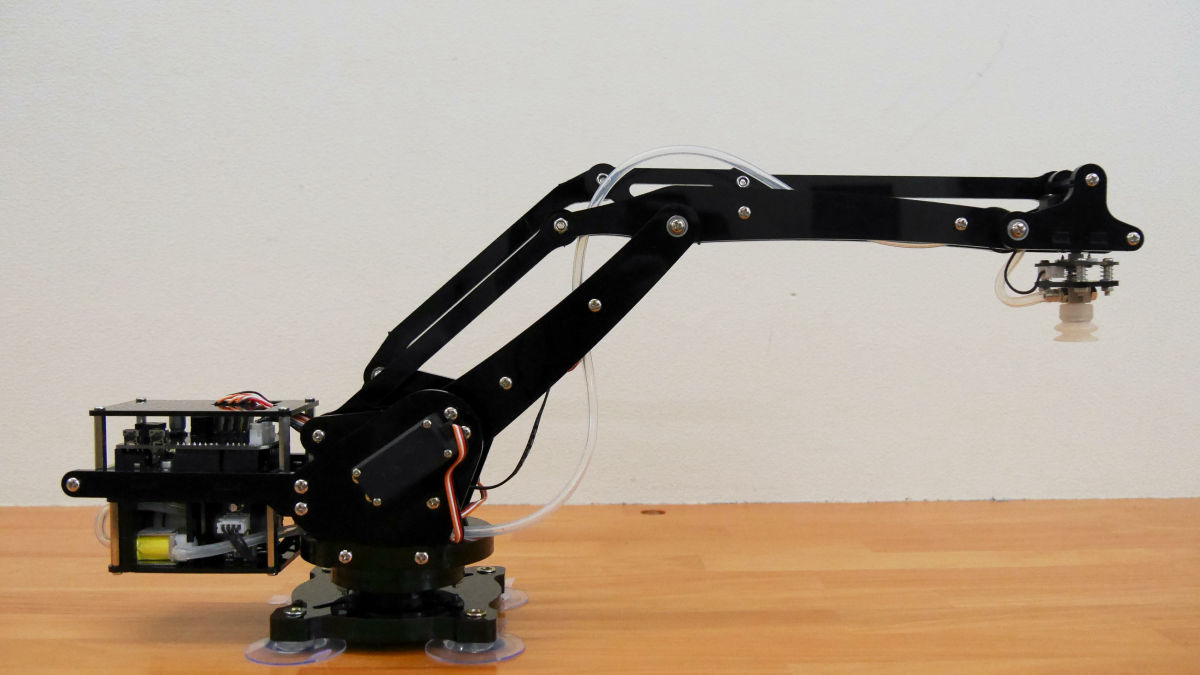
Looking from the side like this.
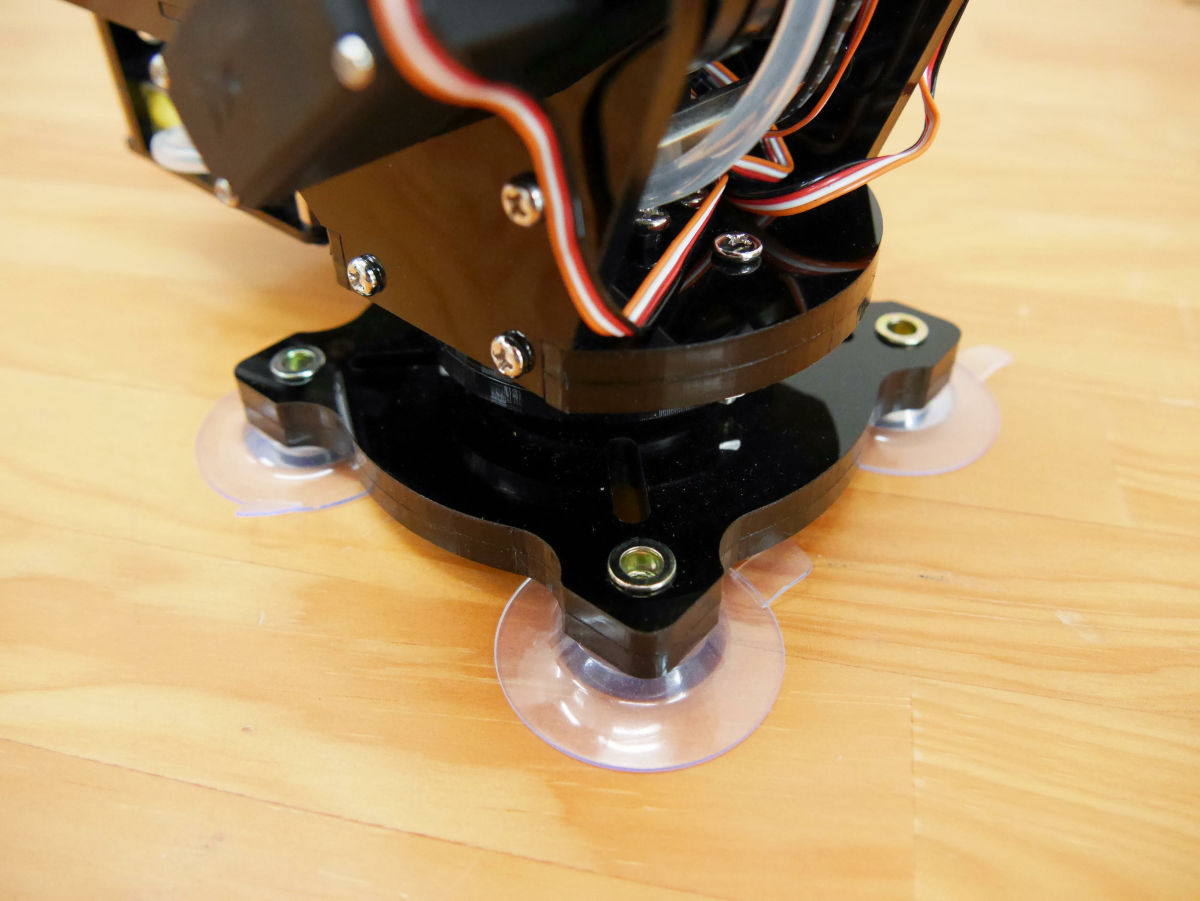
The pedestal has 4 suction cups and can strongly adhere and stability is outstanding. In addition, the suction cup can be easily removed by grasping the knob.
The tip part is made of silicon and it is possible to lift the object by sucking air.

Two side servos are mounted on the side.
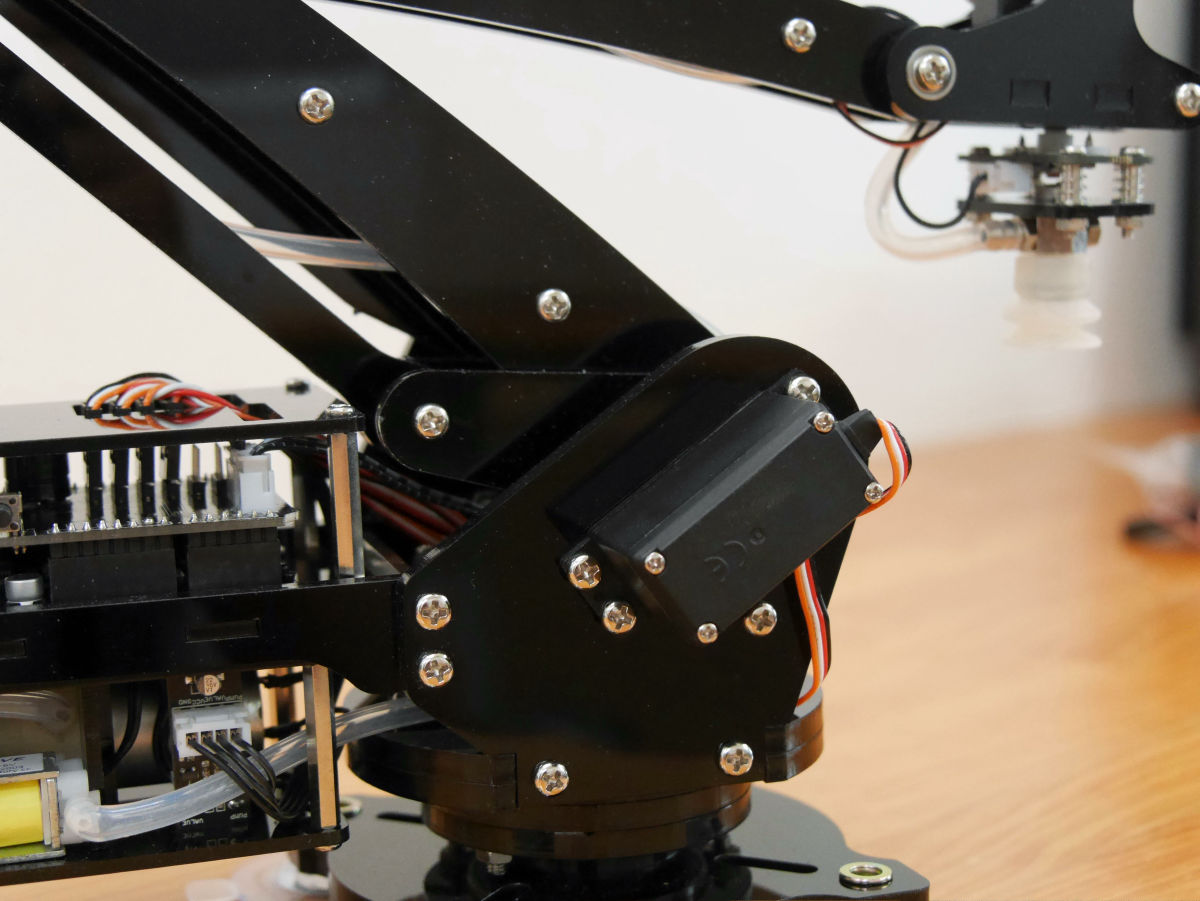
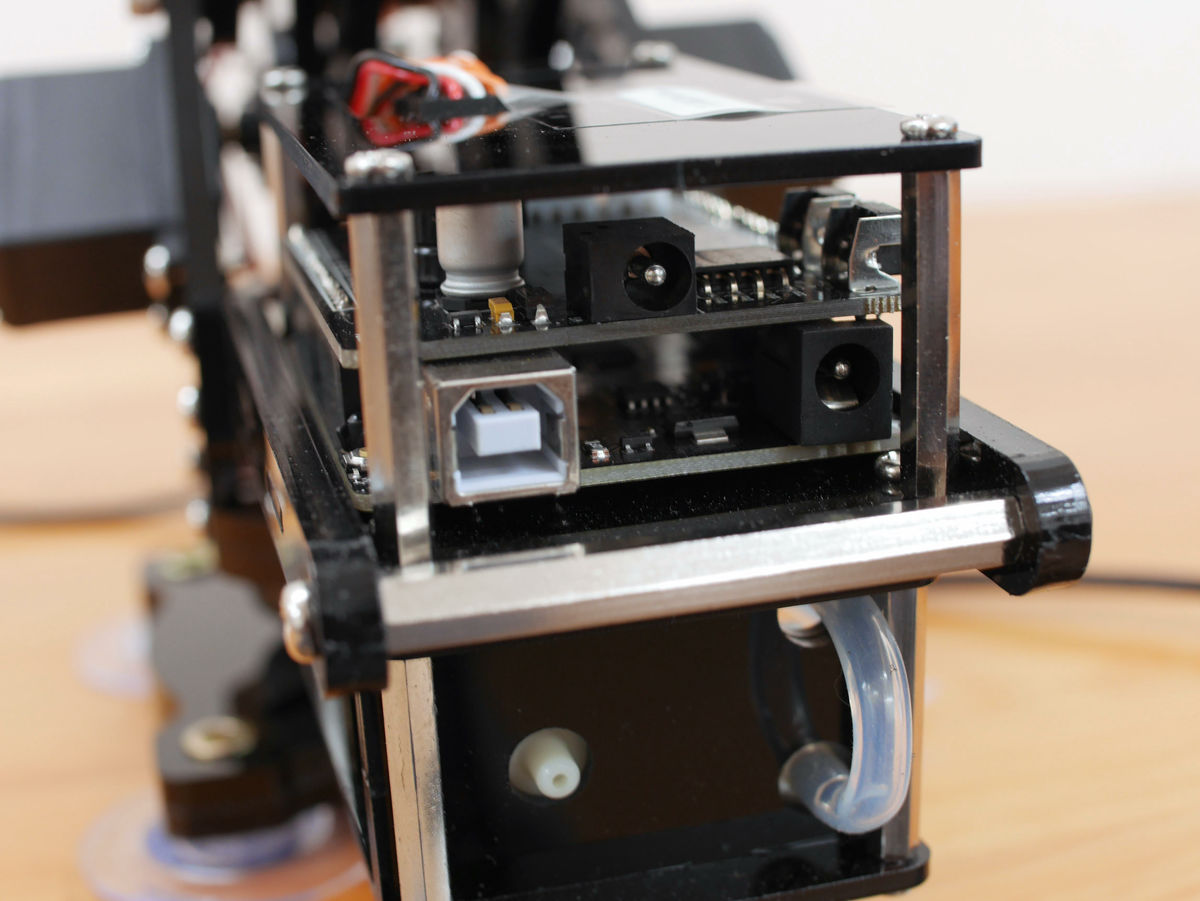
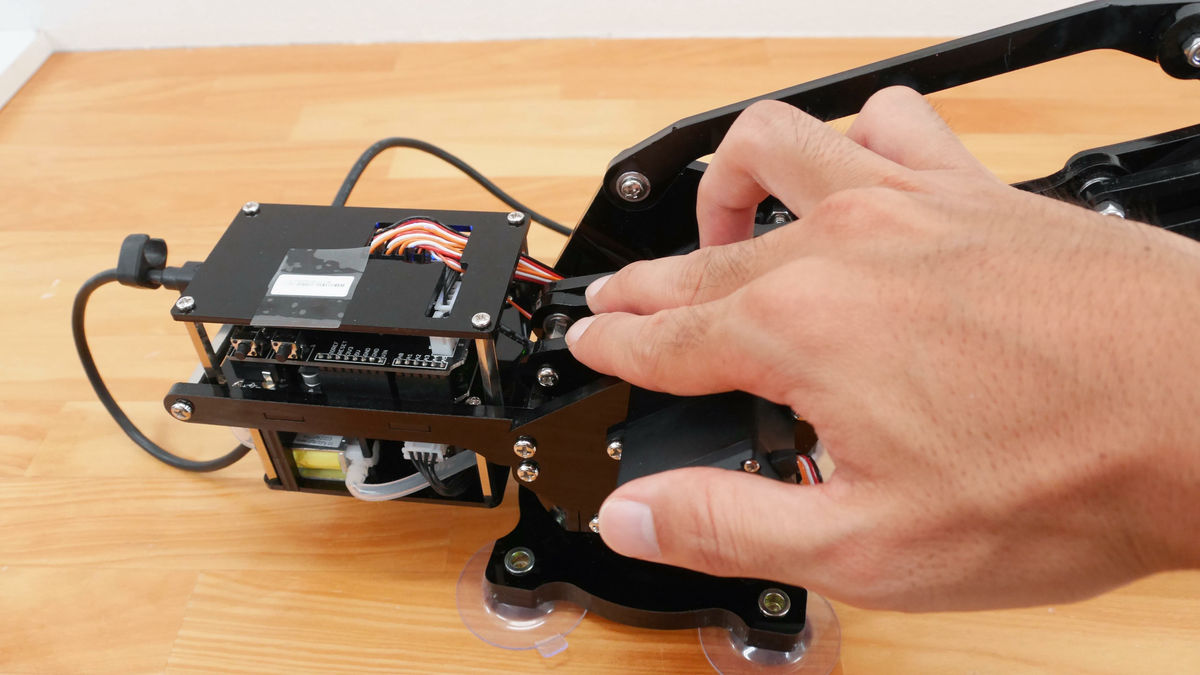
Behind the bodyArduinoAnd UFactory special shield "Uduino" are stored in the upper part, and a motor for vacuum is mounted below it.
Black substrate is Uduino.
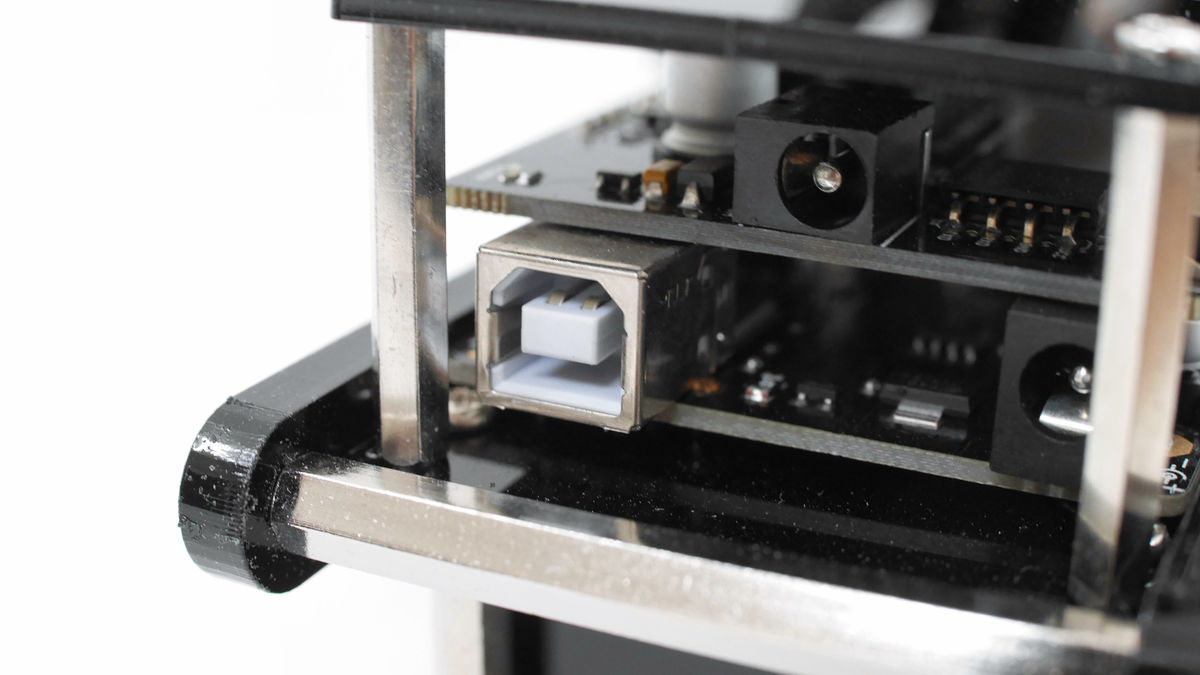
USB port · AC jack (Uduino) · AC jack (Arduino) behind the main unit. Please note that the supplied AC adapter needs to be connected to Uduino's AC jack. Connecting to the AC jack of Arduino says uArm will break, but because the hexagonal metal spacer is in exquisite position, you can not connect the AC adapter.
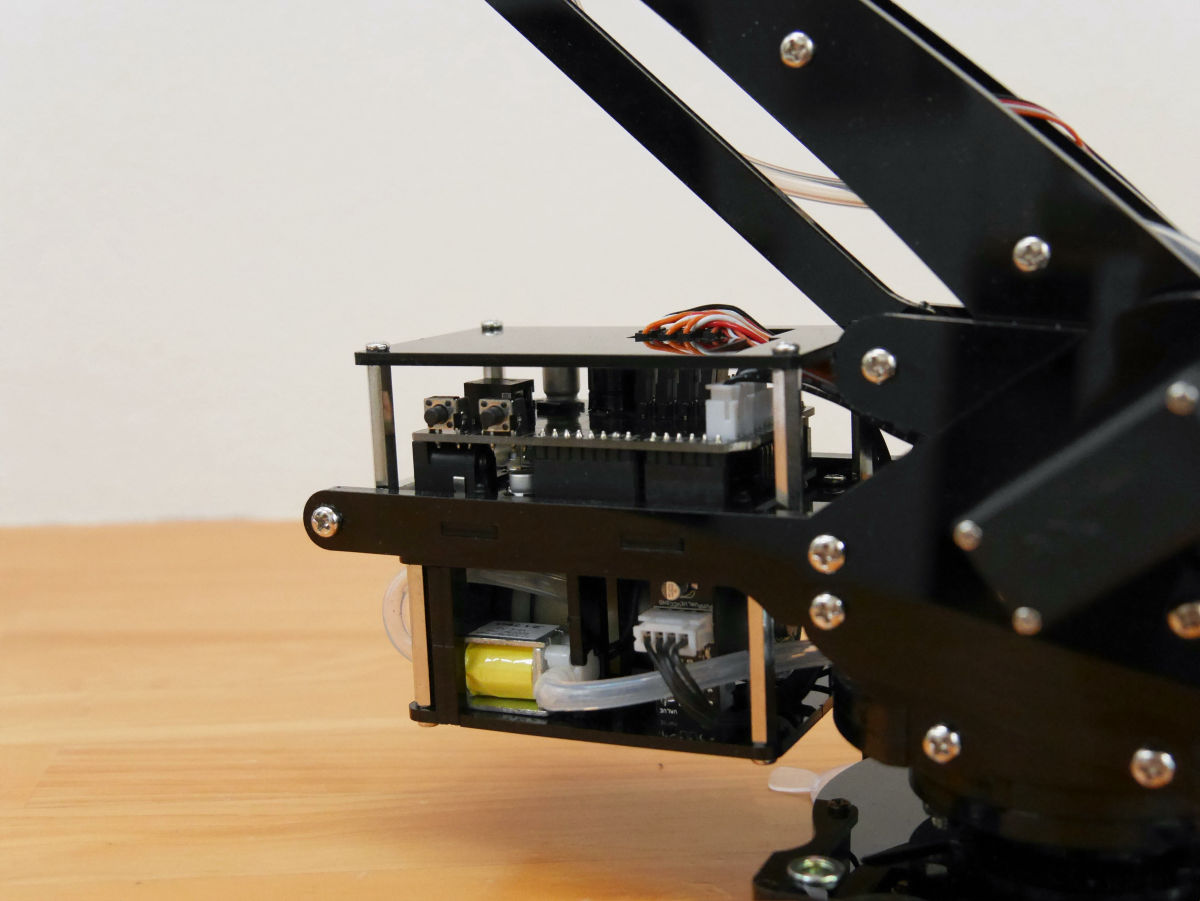
Looking from behind like this. Under Uduino · Arduino you can see the vacuum motor and the translucent vinyl hose.
◆setup
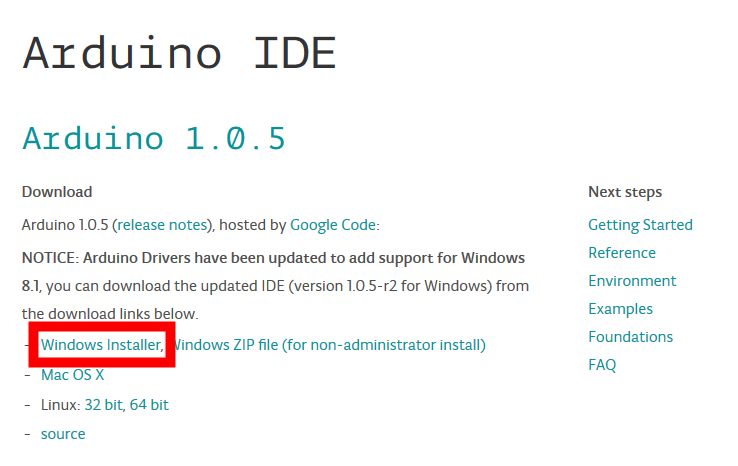
· 1: Arduino IDE
First of allpageInstall the latest version of the Arduino software "Arduino IDE" on your PC. Since this time it is used on PC with Windows 7 installed, click "Windows Installer".
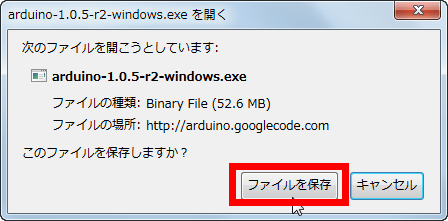
Click "Save File" to save the installer to a place such as the desktop and execute it.
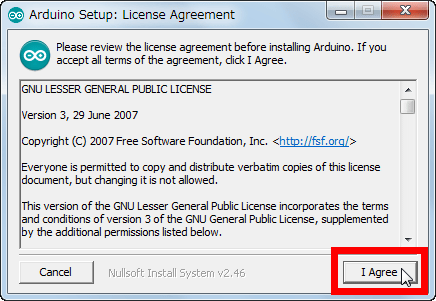
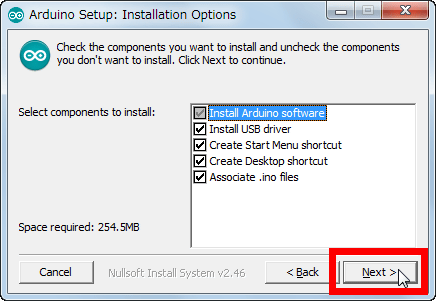
The Arduino Setup window will start, so click "I Agree".
Click "Next".
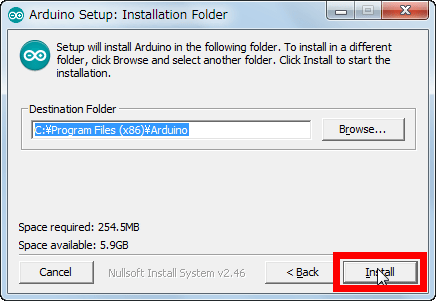
Click "Install".
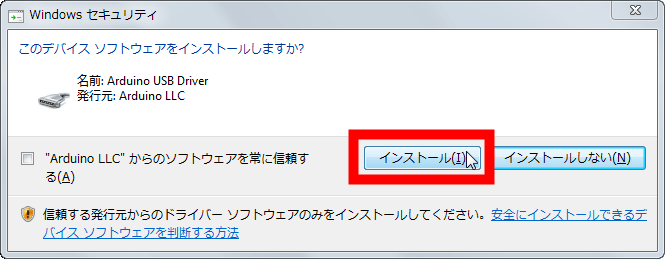
If security warning appears, click "Install".
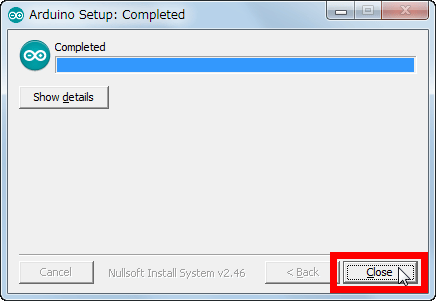
When installation is completed, click "Close".
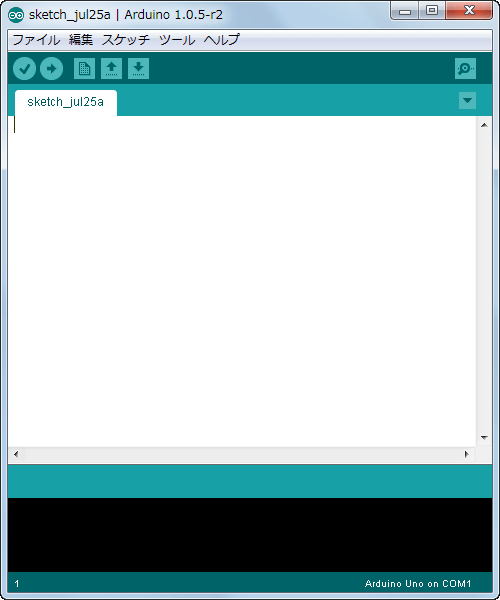
This is Arduino IDE's top screen. Using the Arduino IDE, write a design drawing called "sketch" and program the operation to uArm.
• 2: Installing the serial port driver
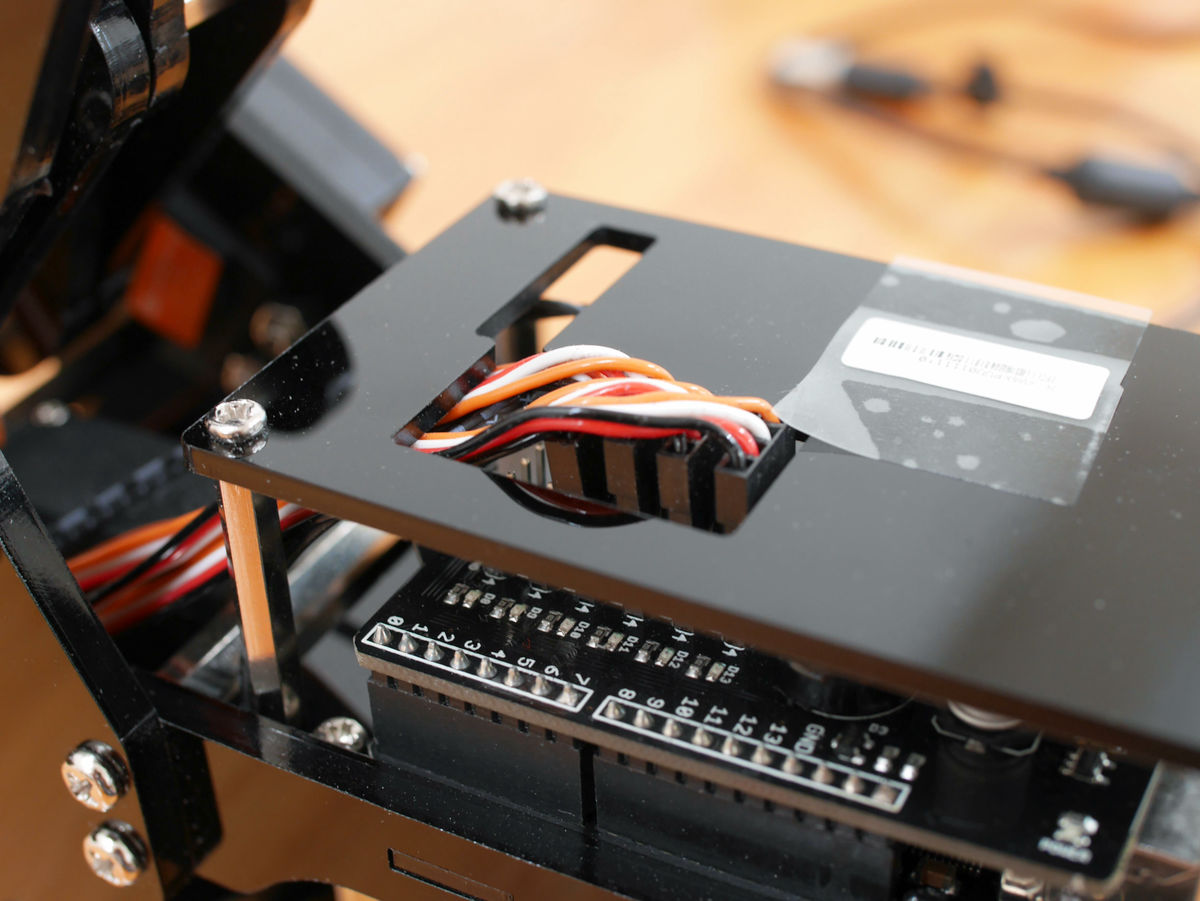
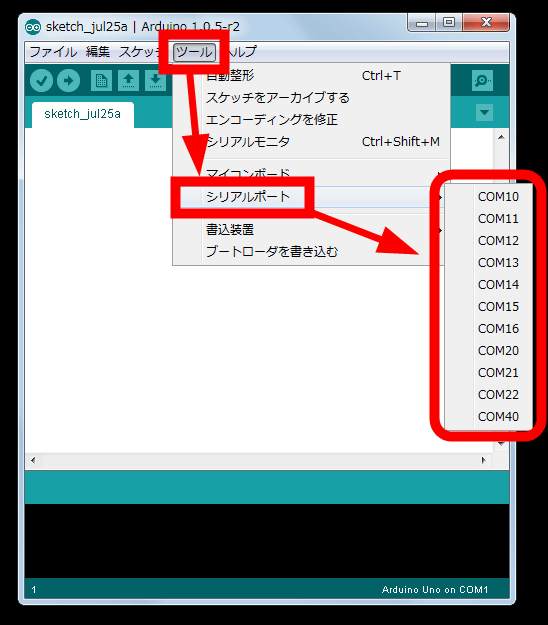
At this point, check if there is an FTDI driver for serial port on the PC. If you see Arduino IDE's "Tools" → "Serial Port" and the display "COM (Numeric)" is displayed, the FTDI driver is installed so skip the following tasks.
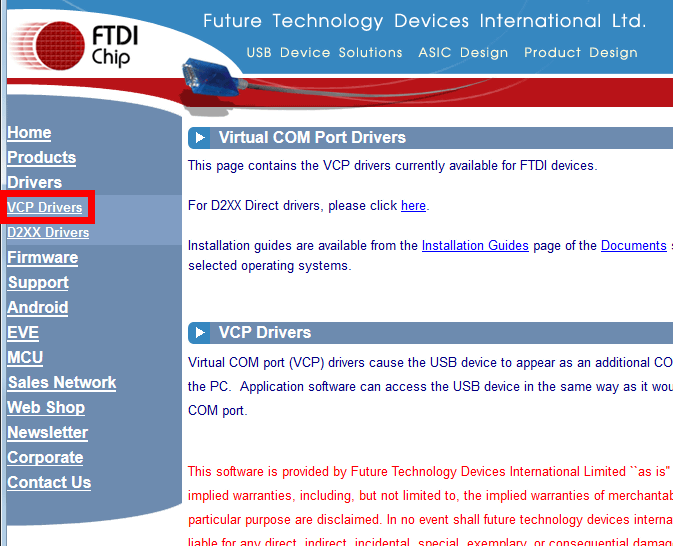
If "serial port" is grayed out, installation of the FTDI driver is necessary. thispageClick "VCP Drivers" under "Drivers" of
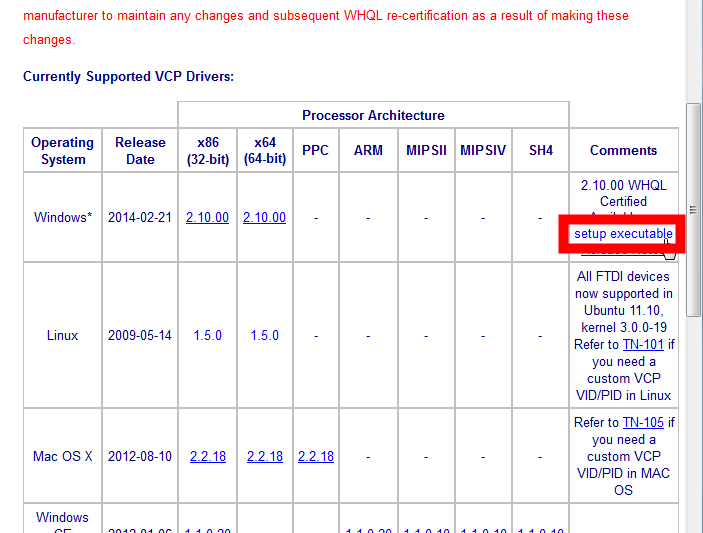
For Windows OS, click "setup executable" of "Windows".
Click Save File to save the EXE file to your favorite place such as the desktop and execute it.
If security warning appears, click "execute".
Click "Extract".
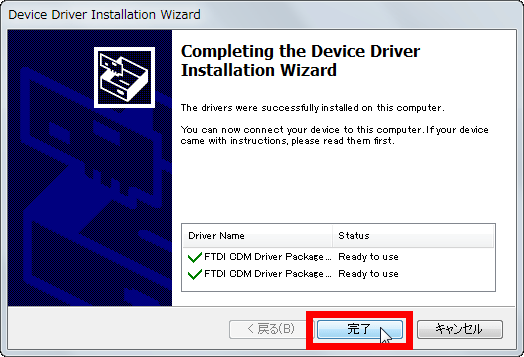
Click "Next".
Click "Finish" and OK.
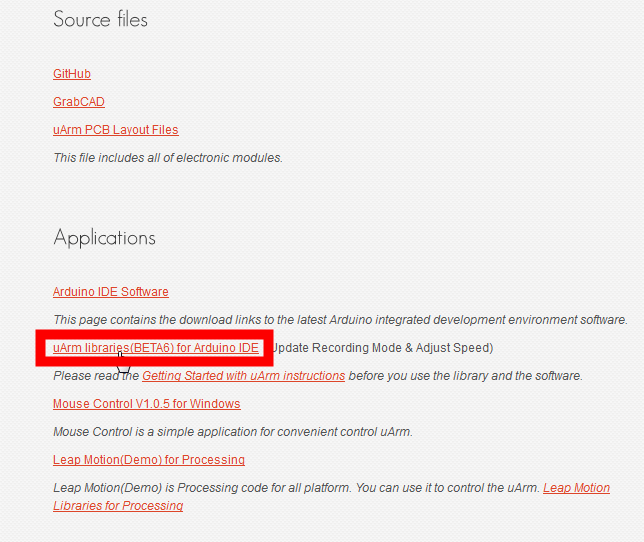
· 3: Installation of uArm control library
Next, thispageDownload the uArm control library from. Click "uArm libraries (BETA 6) for Arduino IDE".
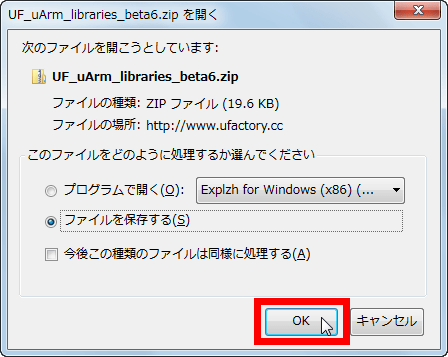
Click "OK" and save the ZIP file in your favorite place such as the desktop.
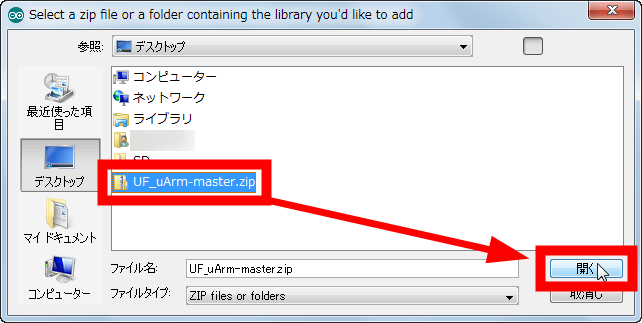
Click "Sketch" → "Use Library" → "Add Library" in Arduino IDE.
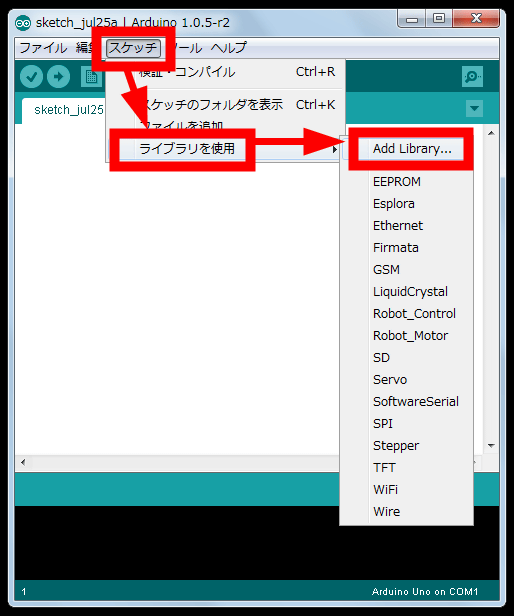
Select the file "UF_uArm_mastar.zip" that you saved earlier and click "Open".
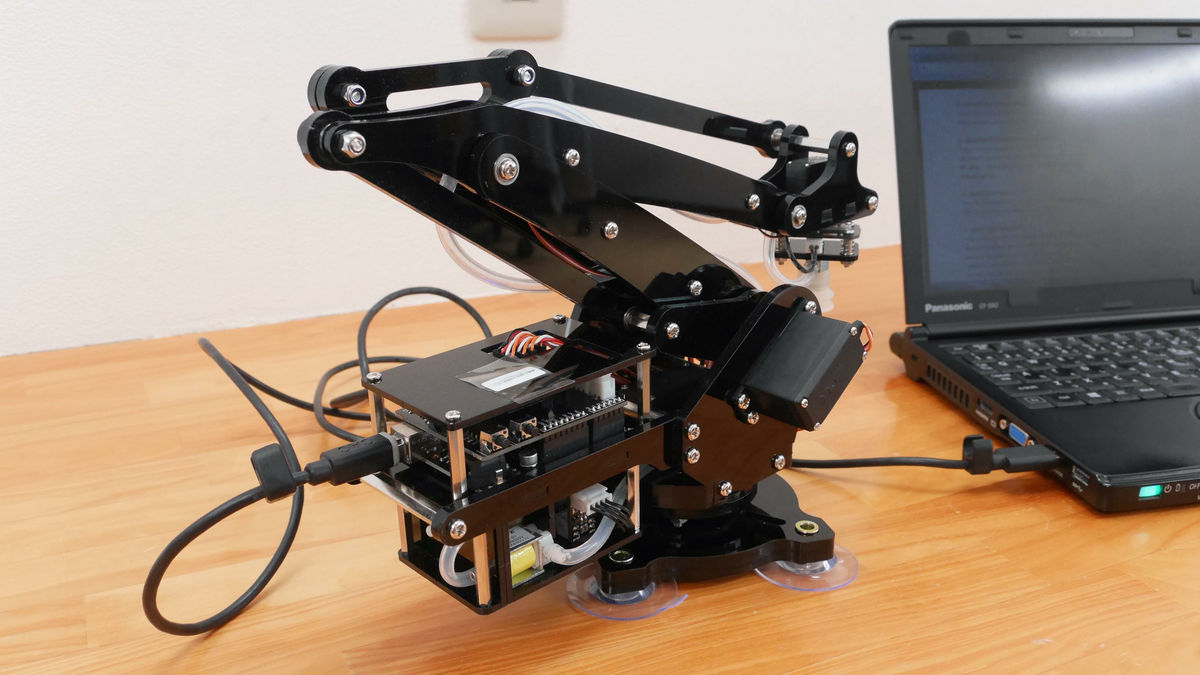
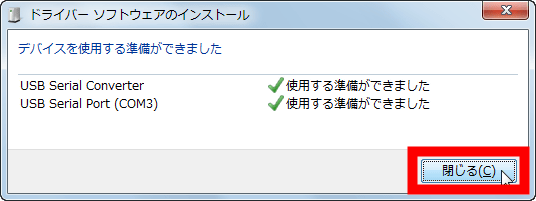
· 4: Connect uArm and PC
Here, connect the PC and uArm using the supplied USB cable.
Click "Close" when the driver is recognized and installed.
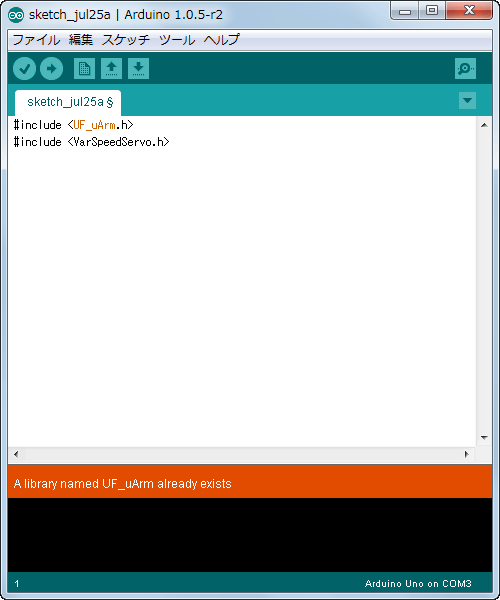
· 5: Load library
In Arduino IDE, click "Sketch" → "Use Library" → "UF_uArm".
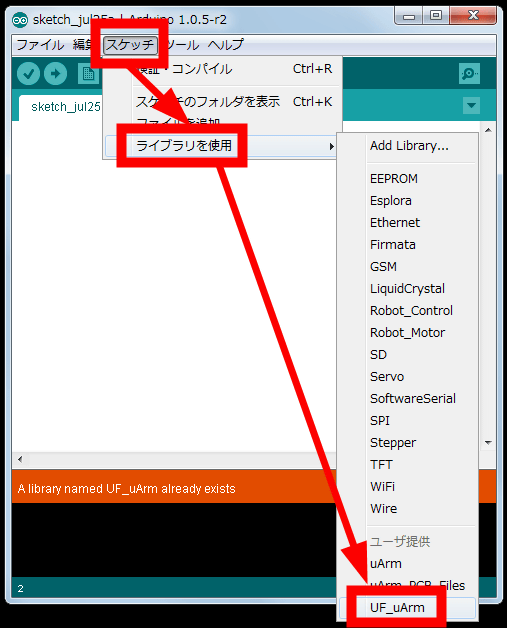
If library is loaded with such feeling OK.
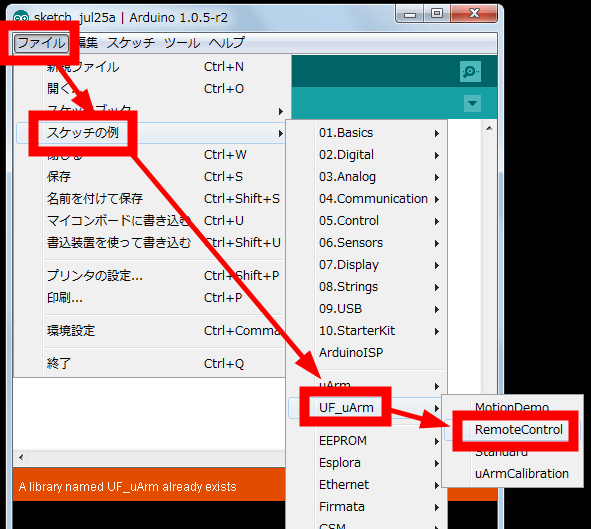
· 6: Read remote control sketch
Next, let uArm read the remote control sketch prepared in advance. Click File → Sketch Example → UF_uArm → RemoteControl.
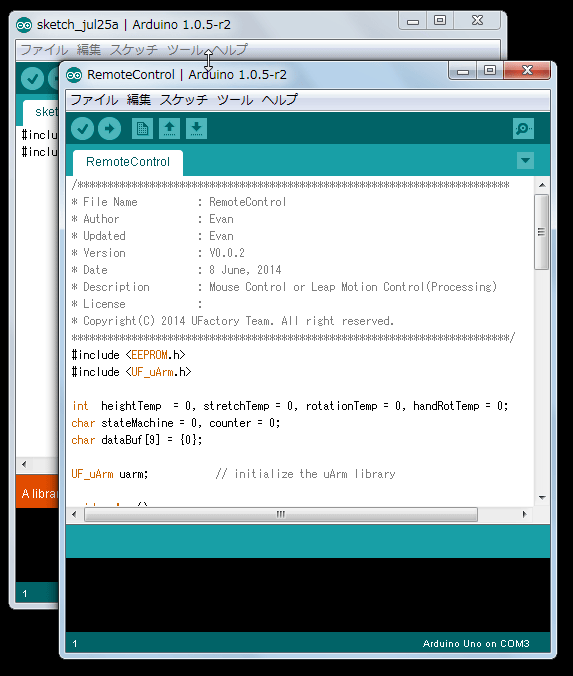
Reading of the remote control sketch succeeded when a new window was launched.
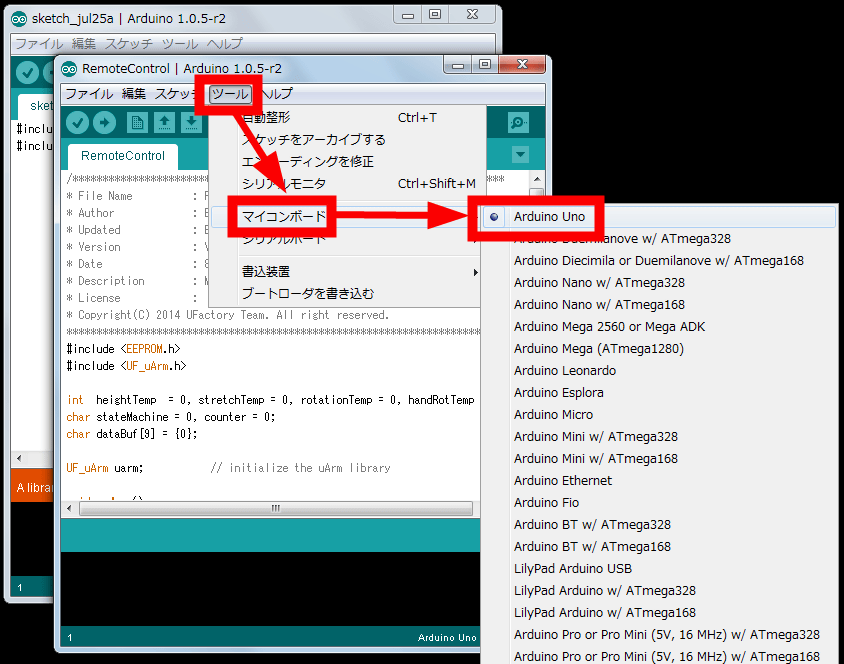
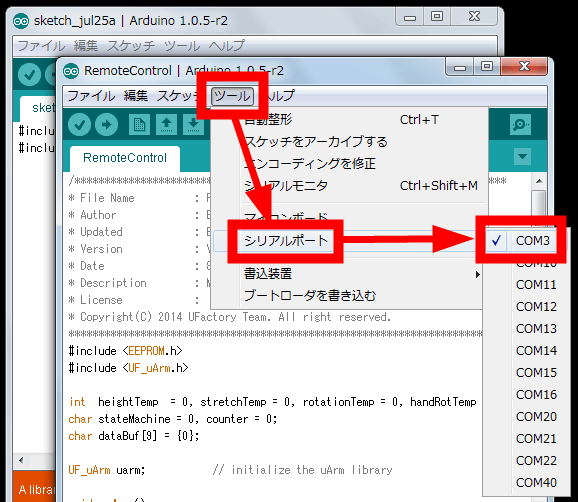
In the new window, click "Tools" → "Microcomputer board" → "Arduino Uno".
Click "Tool" → "Serial board" → "COM 3" in that order.
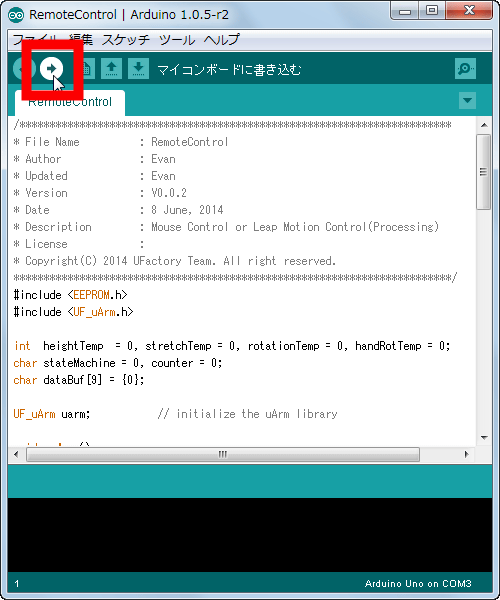
Click the "write icon" at the upper left of the screen to write the remote control sketch to the uArm main unit.
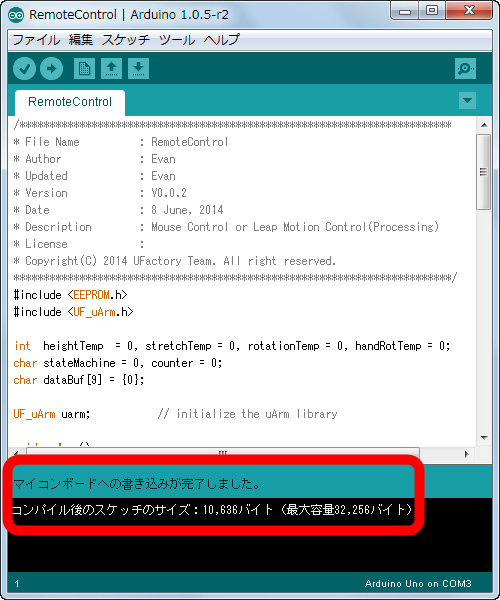
After waiting for a while, it will be OK if "Writing to the microcomputer board is completed."
· 6: Calibration
Calibration must be performed when using uArm for the first time. You can see how to calibrate by looking at the following movie.
UArm Calibration with new Arduino library - YouTube
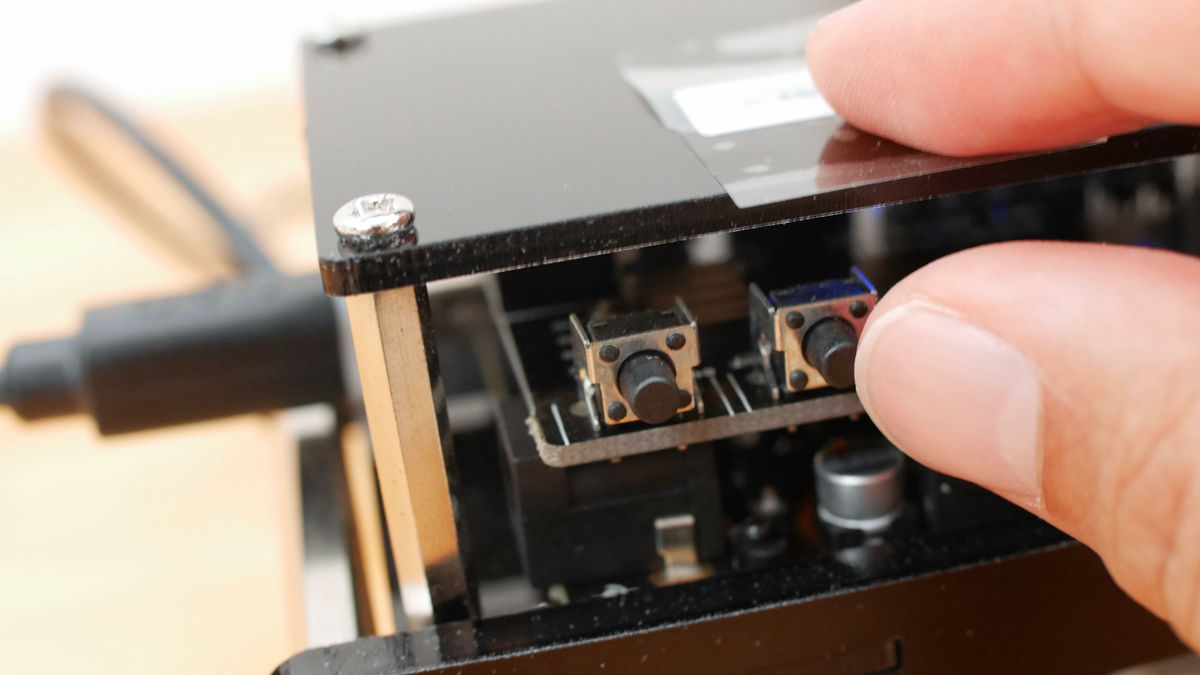
Connect the power cable and press and hold the right D7 button on the rear side of uArm right side for 3 seconds.
Extend uArm's arm by pulling it to the maximum ... ...
Push the base of the arm tightly and press the D7 button again once, the calibration is completed. The arm automatically returns to the closed state (home position).
◆Try steering uArm with mouse
As setup is completed, immediately use the mouse to pilot uArm. First of all,pageOpen the file "Mouse Control" by clicking "Save File".
If you receive a security warning, click "Run" to activate Mouse Control.
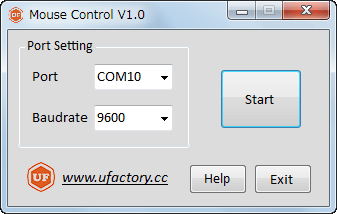
Mouse Control's top screen is such a very simple window.
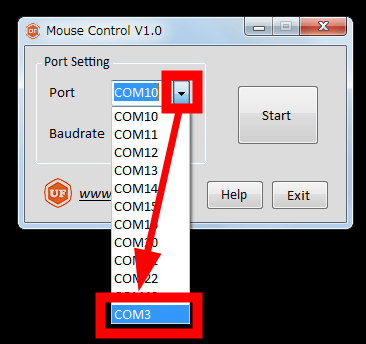
Click "▼" of Port and switch to "COM 3" ......
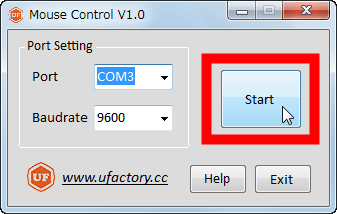
Click "Start".
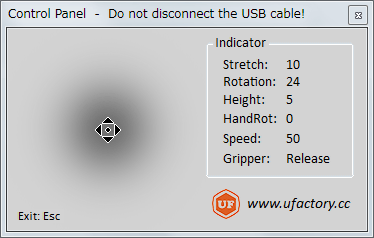
Then such a window will start up and you can maneuver uArm with the mouse. When the mouse is moved back and forth, the arm expands and contracts, and when it moves left and right, the pedestal turns, the height of the arm is raised and lowered with the wheel, and furthermore, by pressing the vacuum ON / OFF with the left click, the object is picked up and picked up It is possible.
The appearance of lifting small objects thoroughly with uArm is from the following movie.
Operate uArm with a mouse and move small items like this, YouTube
Suction power of uArm is considerable. You can pick up canned cans and can juice with contents lightly.
UArm lifts can juice easily HIGH POWER - YouTube
◆Summary
The desktop robot arm "uArm" can be easily operated with a mouse, can easily pick up canned juice with a powerful suction power vacuum, and by exchanging the tip portion, it is possible to scratch things on the desk with a huge scissors called a gripper at random It is also possible to roll.

Also, it is a place to publicly own developed softwareGitHubLibraries for uArm will be released one after another with gesture operation already, you can operate PCLeap MotionThere is also a control library that allows you to steer uArm using, and if you use it, you can move uArm as if it were your own arm.
Of course, if you are confident in programming, you can also design your own sketch with specialized software "Arduino IDE" and let uArm memorize various actions. What you do with uArm and what you can do depends on who you use.
When uArm is on the desk, it occupies considerable space, and it is carefully and boldly taken carefully and carefully using the dedicated software Mouse Control, which requires delicate mouse operation for objects that are clearly reachable It sometimes took over the figurines of the next person under the desk, and if you notice it, you will be absorbed in drawing sketches of Arduino IDE and it seems that you can spend a very wonderful time.
Related Posts: