




人類初の「月面探査レース」で勝利を目指す日本チーム「HAKUTO」の月面探査車のテストの様子を見学してきました
Googleがスポンサーとなって、民間による最初の月面無人探査を競うコンテスト「Google Lunar XPRIZE」では、日本からも唯一のチーム「HAKUTO」が参加して「月への一番乗り」を目指して開発を進めています。2016年9月27日(火)には、鳥取県の鳥取砂丘で報道陣を招いた公開テストが実施されたので、どのような機体でどのように動くのか、しっかりと観察してくることにしました。
HAKUTO
https://team-hakuto.jp/
au × HAKUTO MOON CHALLENGE
https://au-hakuto.jp/
公開試験の会場、快晴の鳥取砂丘にやって来ました。実際に探査機を走らせる予定となっているものの、雨が降ると中止になってしまうところだったので、この日は絶好のテスト走行びよりでした。

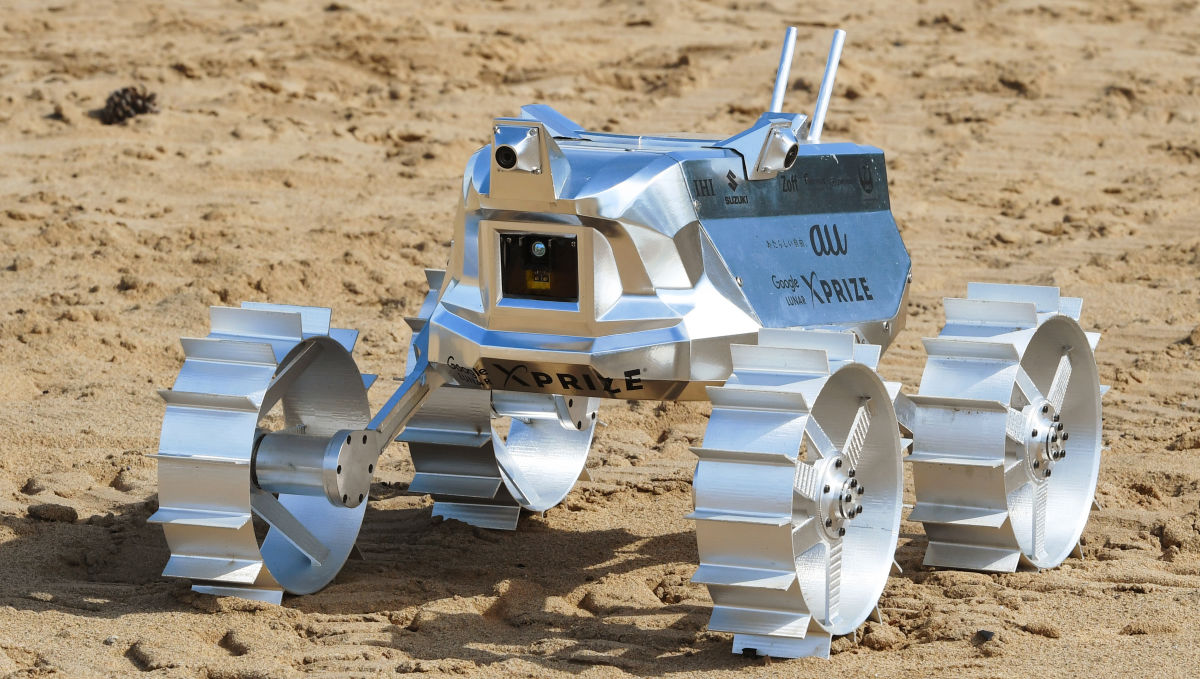
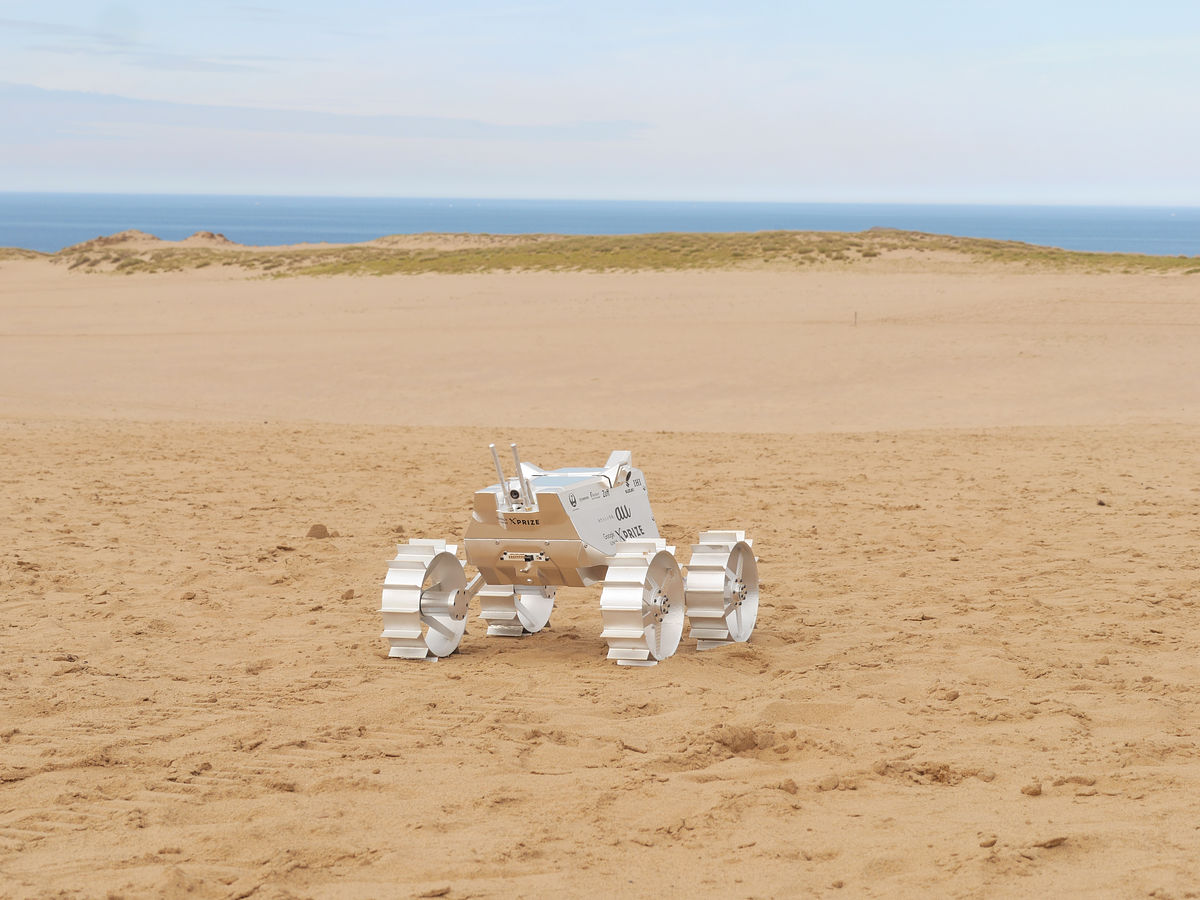
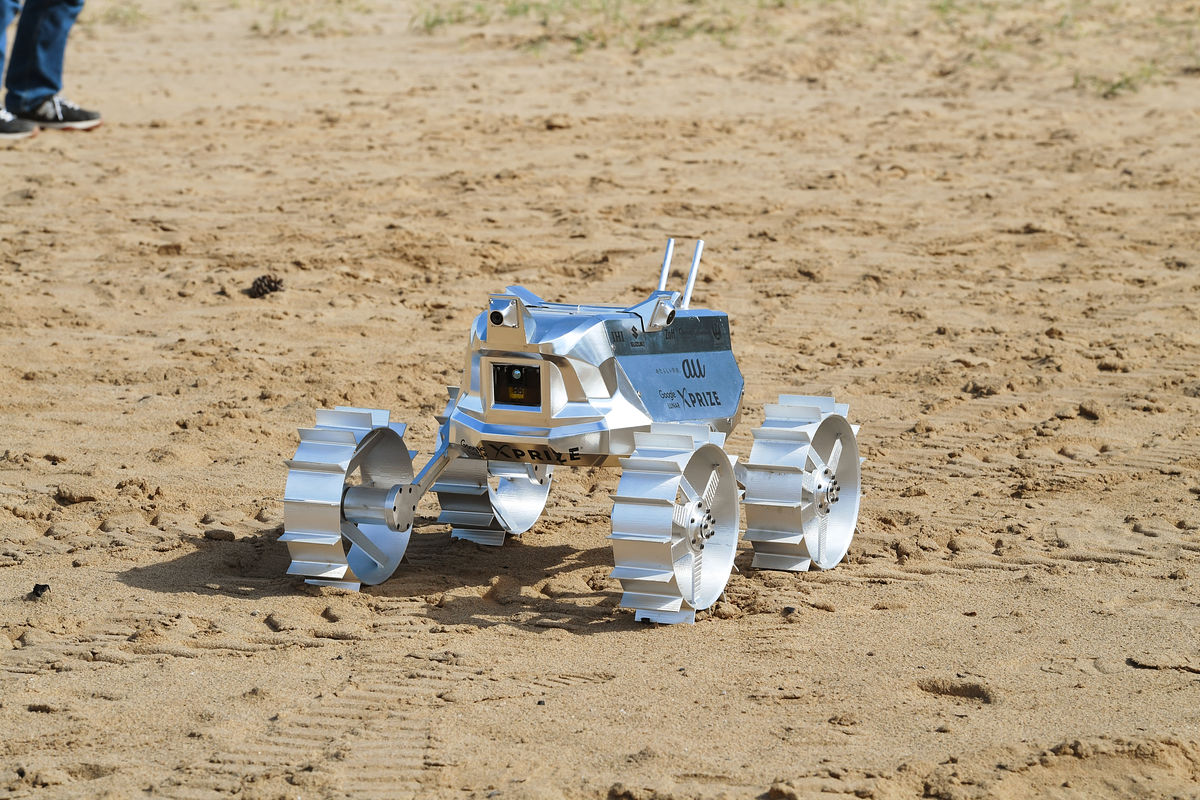
当日に公開された2つの機体の1つ、「HAKUTO Rover(ローバー)」のプリフライトモデル3。この機体は実証実験を行うために試作されたもので、本番にも用いられる機器やソフトウェアを基本的にそのまま搭載しています。今回はこの機体を用い、鳥取砂丘を月面に見立てることで、カメラの性能評価と、赤外線を用いて対象物との距離を測る「ToFセンサ」の性能評価、そして地球との通信を模した通信試験の3つが実施されることになっています。

実際にローバーが走っている様子はこんな感じ。ホイールのツメをしっかり砂に食い込ませながら、ゆっくりと前進したり方向転換したりする様子を見ることができます。
月面探査レース「XPRIZE」で勝利を目指す「HAKUTO」の月面探査車のテストの様子 - YouTube
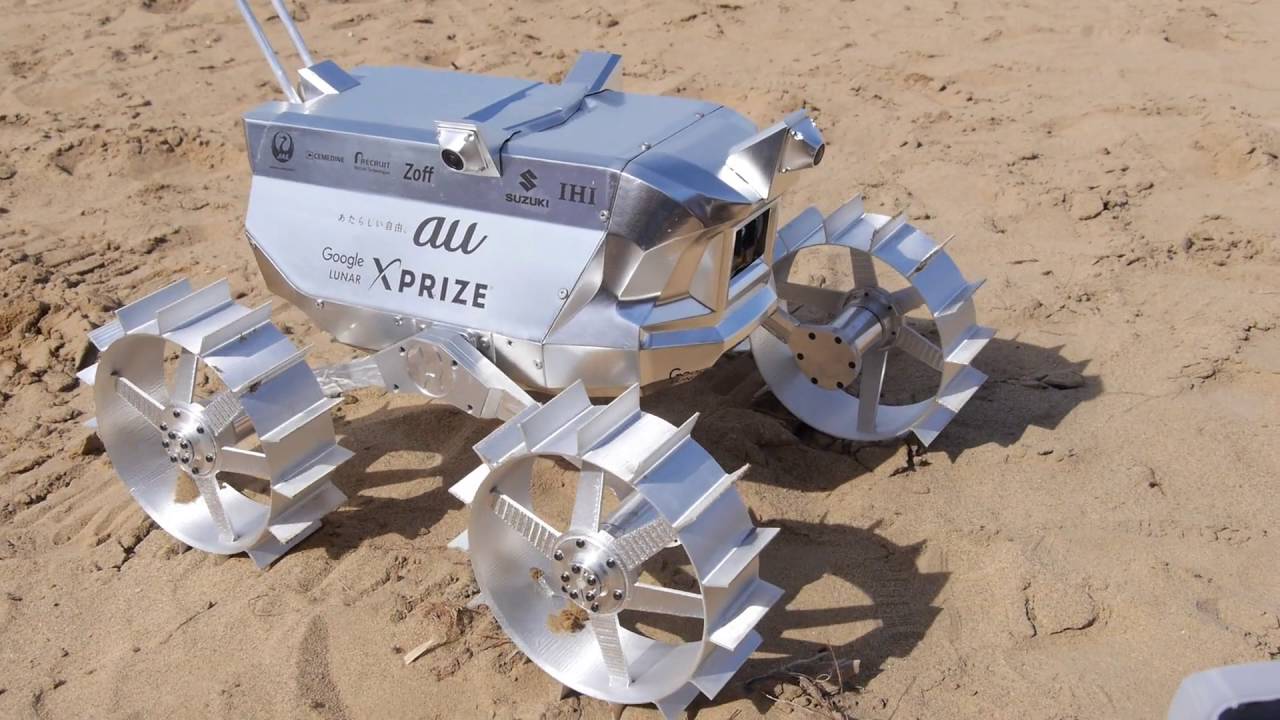
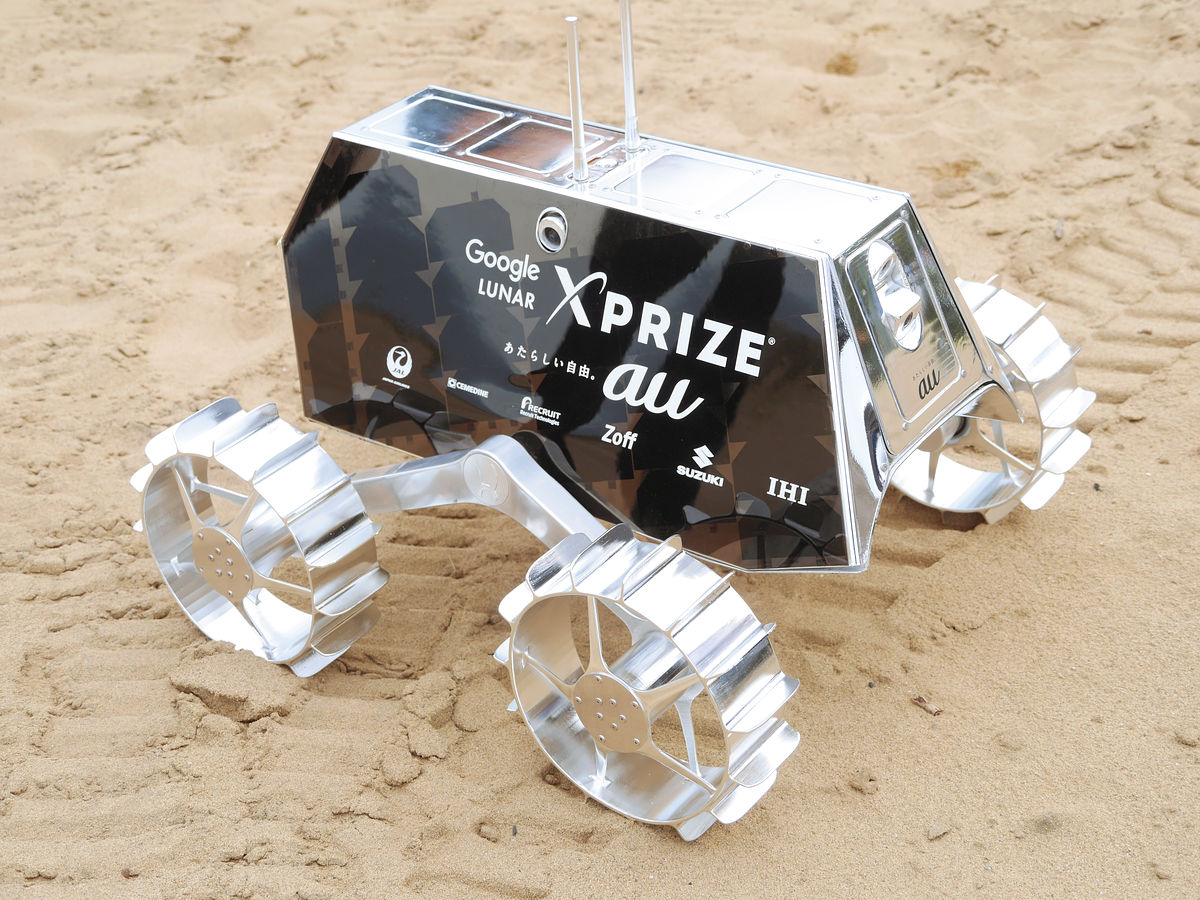
横から見るとこんな感じ。アルミ削り出しで作られた4つのホイールで、サラサラの月面をガッチリつかんで前進するように作られています。

グリップ力重視のホイール。このホイールは試作機の形状ですが、本番用の機体でもほぼ同じ形状のものが使われることになります。
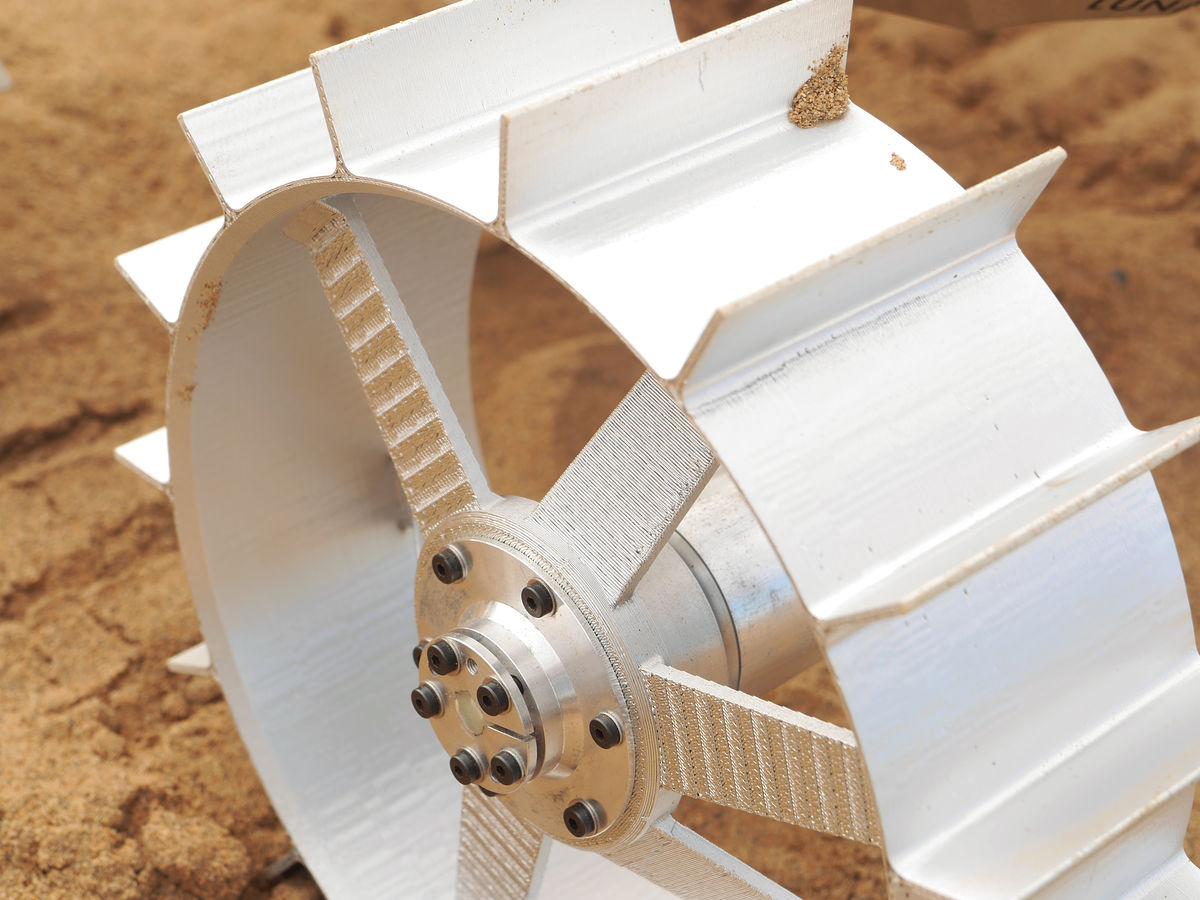
ホイールと車軸の間には十分なクリアランス(隙間)があるので、こんな風に砂が入り込んでも問題ないというわけです。
機体前部には写真/動画撮影用のカメラと、赤外線を照射して前方障害物との距離を測定するToFを搭載。

左右両サイドにもカメラを搭載。これに後部カメラをあわせることで、機体の周囲360度の全てを視認できるようになっています。

HAKUTOチームが参加する「Google Lunar XPRIZE」は、NASAやJAXAといった宇宙開発機関ではなく、民間によるロボット探査機の開発を競うコンペティションです。定められているミッションは、まず月面にロボット探査機を着陸させ、着陸地点から500メートル以上移動。その後、高解像度の動画や静止画データを地球に送信するというもので、これらのミッションを2017年中に完了させる必要があります。最も早くミッションを成功させたチームには賞金2000万ドル(約20億円)、2位のチームには500万ドル(約5億円)が与えられるなど、賞金総額は3000万ドル(約30億円)というとてつもないイベントです。
Google Lunar XPRIZE Home Page
http://lunar.xprize.org/

この人類初のレースに挑む日本唯一のチームが「HAKUTO」であり、そのために開発されているのがこの「ローバー」というわけです。ちなみに、ロケットの手配なども自前で行う必要があるのですが、ロケットの独自開発を行うのはさすがに無理があります。ということで、各チームは民間のロケット開発企業に打ち上げを依頼しており、HAKUTOでは他チームとの共同でSpaceXの「Falcon 9」ロケットでローバーを打ち上げ、Astrobotic社のランダー(月着陸船)「Griffin」で月面に軟着陸する予定となっています。
ローバーは月着陸船「ランダー」を経由して地上と通信することで、動画像データのやりとりや操縦を行います。試験会場には、地上で操作を行う「地上局」が設置され、各種機器が並んでいます。

ローバーは通信用設備として、2.4GHz帯のWi-Fi電波と900MHz帯の専用プロトコルによる通信装置を搭載しています。ということで、地上局エリアには電波を受信するためのWi-Fiルーターが設置されています。このように、民生機器が多く使用されているのも、民間型宇宙開発コンペの特長といえるのかも。ちなみに、月とのやりとりには片道2.5秒・往復で5秒のライムラグが発生するとのことです。

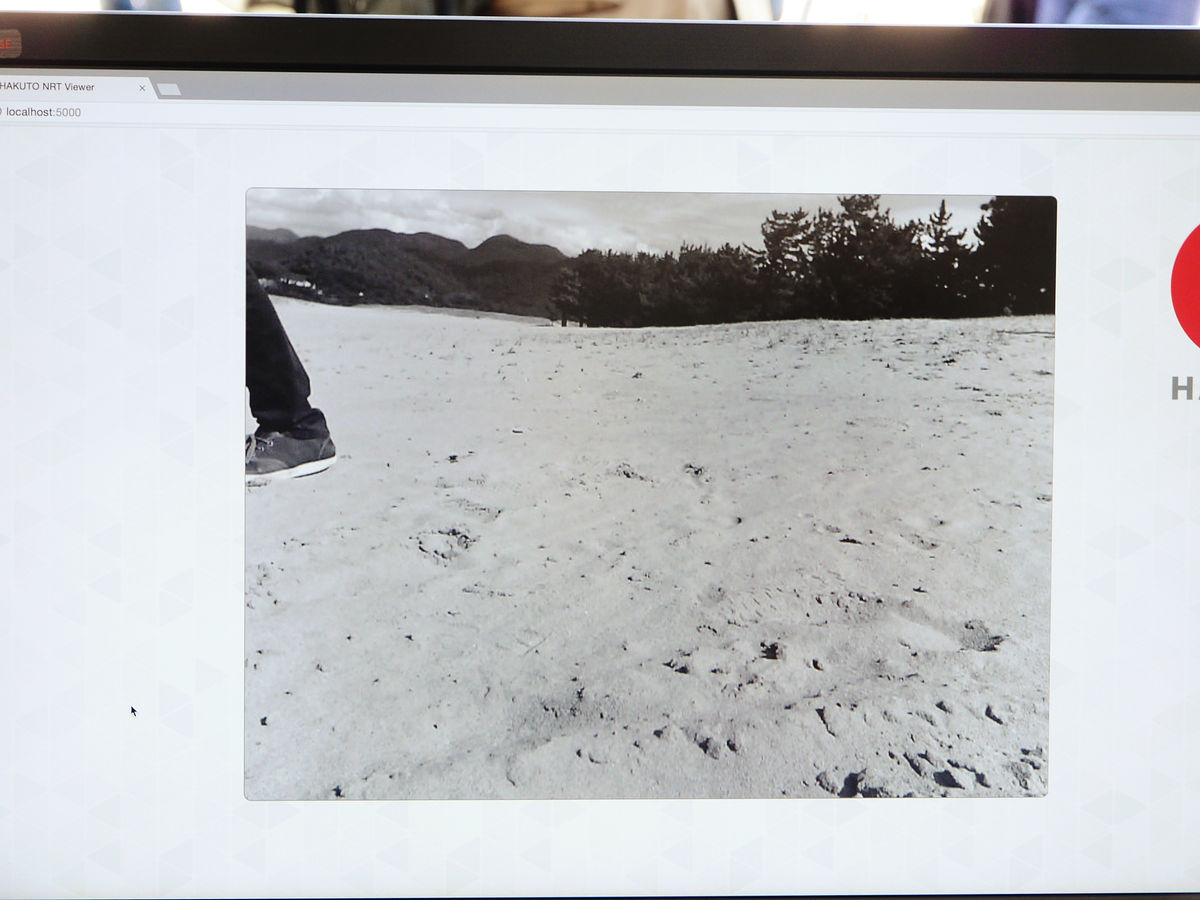
ローバーから送られてくる動画像や機体データなどの一例。画面には前後左右4つのカメラの映像のほか、機体の傾きやホイールの回転数などのテレメトリデータと、「50cm進め」「60度回転しろ」などのコマンドメニューが表示されています。

実際に送信されてきた画像がコレ。この時は昼間だったので、実際の月面の風景とはまったく異なると思われますが、その様子はこのあと行われる夜間試験で見ることができるかも。
ToFが捉えた前方障害物の様子。画面に表示される黒く細かい点が、物体との位置関係を示しているのですが、一体どのような状況をとらえた画面なのかというと……
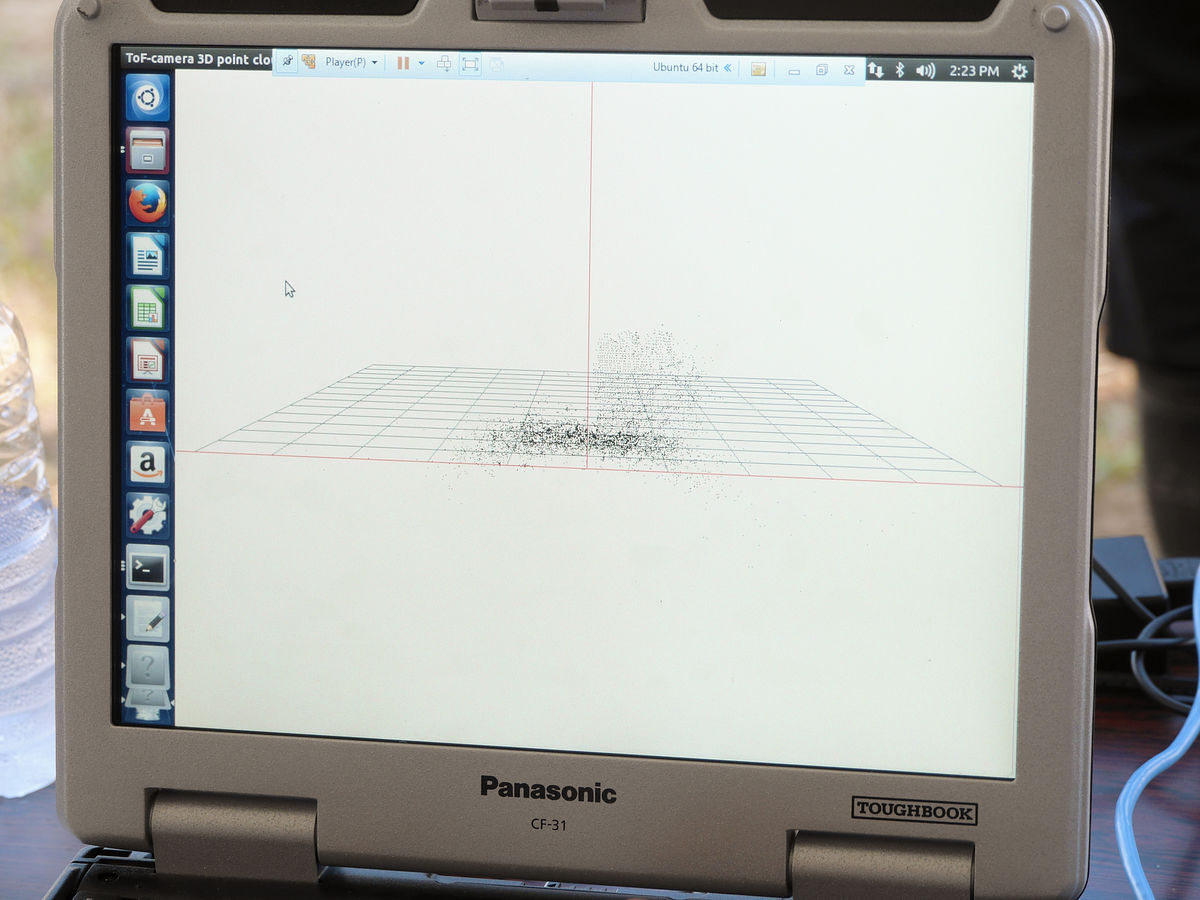
こんな風に、前方に大きな岩が存在する状況というわけです。このようにして捉えた周囲の状況をローバーは地上に送り、地上局のチームは機体の状況を判断しながら操縦して500メートル進み、同時にカメラによる撮影を行ってミッションクリアを目指します。

実際にローバーから送られてくるテレメトリデータの画面はこんな感じでした。
月面探査レース「XPRIZE」で勝利を目指す「HAKUTO」の月面探査車がから送られてくるテレメトリデータ画面 - YouTube

ローバーの移動速度は、時速100メートル程度とのこと。万が一転倒してしまうと一巻の終わりになってしまうため、周囲の状況を確認しながら走行する必要があるということなのかもしれません。
インタビューに応じるHAKUTOを率いる袴田 武史代表。ミッションに挑戦する目的について袴田代表は、「今は誰もがこのような目標にチャレンジできる時代になっています。この活動を通じて人々に元気を与えることができれば」と語っていました。また、プロジェクトの進み具合について尋ねられると「事前に研究室での試行錯誤を行っているので、大きな問題は発生していません。現在は実際に月に行く『フライトモデル』の作製に取り掛かっており、全体としては8合目に差し掛かっているところです」と答えていました。

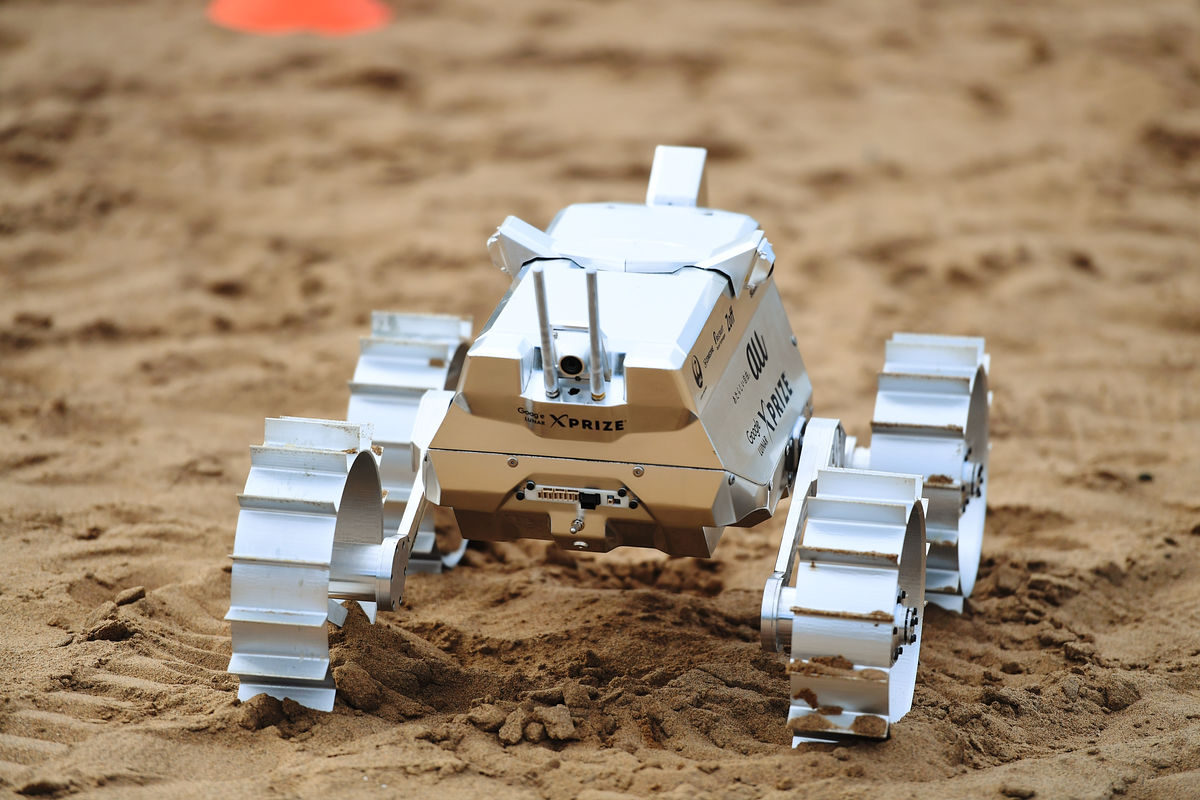
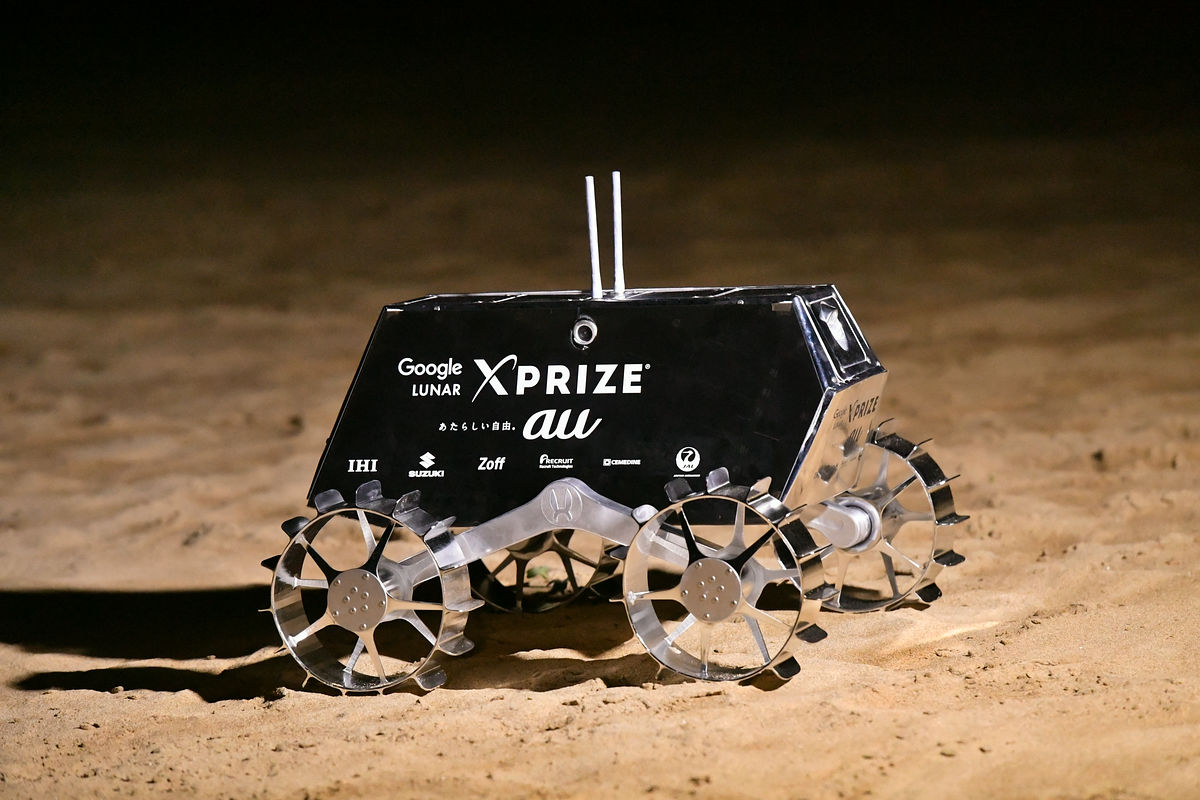
袴田代表が触れていた「フライトモデル」の試作機がコレ。まだ試作機の段階のため、実際の形状とは異なる部分はありますが、機体側面には発電用の太陽光パネルが設置され、ホイールの形状もやや変化しています。
ホイールに付いたツメの部分は角が丸く処理されています。また、軸とホイール本体をつなぐスポークは星形の形状をしており、裏と表の両面で支えるデザインとなっています。

もちろん機体周囲には確認用のカメラやセンサーを搭載。現時点の機体にはパートナー企業のロゴなどがプリントされていますが、実際に宇宙にいく機体だと、色が違う部分に太陽光が当たることで発熱の仕方にバラつきが生じる可能性があります。そのため、本番用の実機では、ロゴを機体に彫り込む処理を行うことになっているそうです。

機体側面に搭載された太陽光パネル。実機では、発電効率を最大限にするために太陽光パネルがむき出しの状態になります。本番用の機体は、軽くて強靱なCFRP(炭素繊維強化樹脂)、いわゆるカーボン素材などが用いられ、機体重量を「プリフライトモデル3」の7kgから、4kgへと大幅に軽量化しているとのこと。ロケットの打ち上げには1kgあたり1億円の打ち上げコストがかかるともいわれており、費用を圧縮するための大切な取り組みの1つです。

試験会場には、HAKUTOとの取り組みを進めている鳥取県の平井知事も訪れていました。

関心深くローバーを眺める平井知事。テレビなどで見かける印象ままの平井知事の姿でした。

こんな感じで昼の試験は終了。このあと夜からは、真っ暗な鳥取砂丘に強力なライトを真横から当てることで実際の月面に近い環境を再現した状態での走行実験が行われるとのこと。その様子はあとでこの記事に追加する予定なので、見てみたい人はGIGAZINE公式Twitter・Facebook・Google+アカウントでもお知らせするのでぜひフォローしておいてください。
◆夜の部
同日の20時から、夜間のカメラ試験が実施されました。星空の下にまぶしい光が見えるのですが、アレが太陽の光を再現する光源です。

強力なライトを地面に向かって照らすことで、探査機に降り注ぐ太陽光の状態を再現。月は大気がないため、光の拡散がないのですが、この実験は少しでも地上でその状況を再現しようとするものです。

使用されている光源は、4キロワットという強力なライト。このライトで2万ルクスの照度を再現できますが、それでも予測される月の表面の状態に比べると6分の1の明るさしかないとのこと。

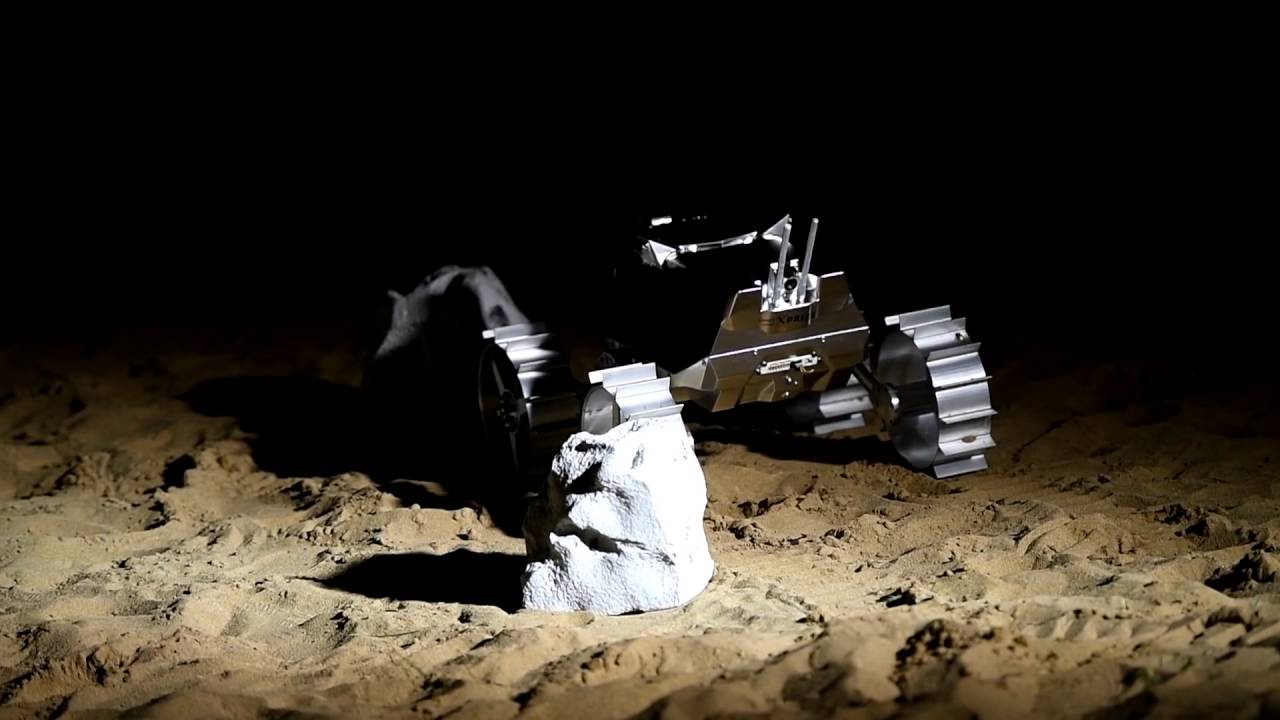
月の石に見立てたオブジェクトを中心に、0度から180度の角度に探査機を配置し、カメラが性能通りに映像を捉えられているか確認していきます。1度置いては数分間計測し、また置き直しては計測、という地道な作業が繰り返されます。

地上局のモニター画面はこんな感じ。1パターンずつ映像を確認していきます。

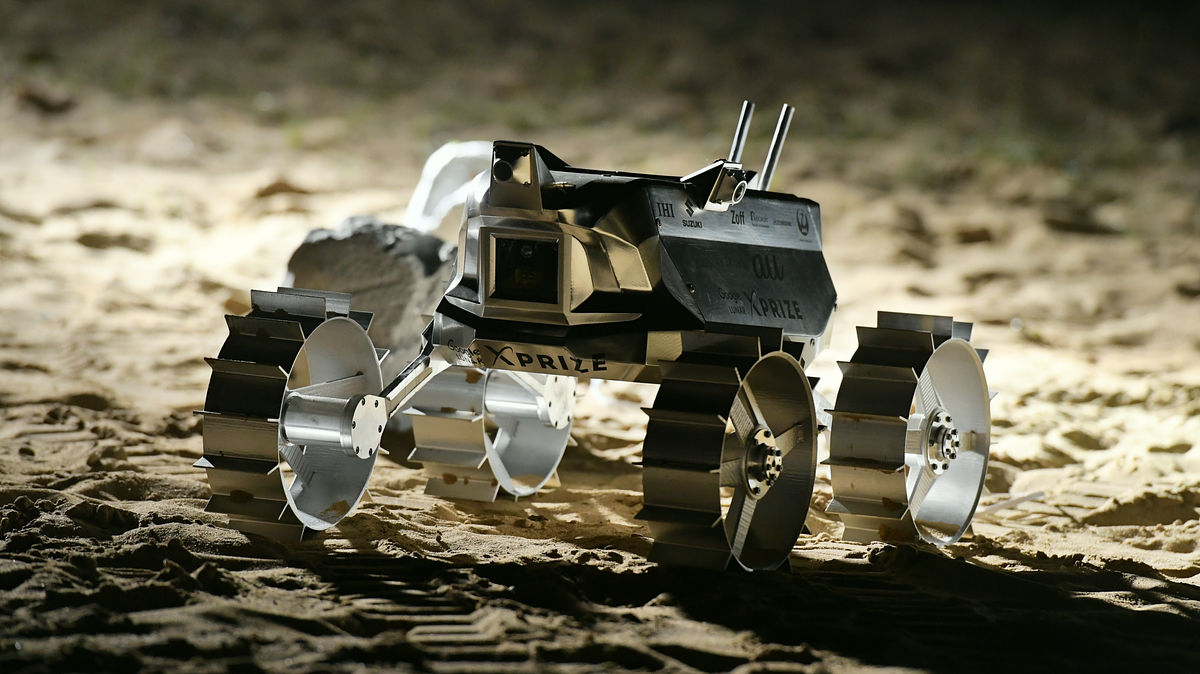
漆黒の闇に浮かび上がる探査機(の試作機)。月の表面で見る探査機の姿はこんな状態なのかも。

実際に打ち上げられる「フライトモデル」の試作機も置かれていました。これはまだ実証実験の前の段階です。
実際に、遠隔操作でローバーが岩を避けながら走行する様子はこちら。実際の速度を感じてもらうために、ノーカットで公開しています。
月面探査レース「XPRIZE」で勝利を目指す「HAKUTO」の月面探査車が岩を避けながら前進する様子 - YouTube
この日はテスト走行ということもあり、データをうまく吸い出せないなどのトラブルに遭遇することも。しかし、その後に原因を究明して解決に成功するという様子も見られました。

HAKUTOのローバーが実際に月に行くのは「2017年のどこか」と、実に含みを持たせた回答でした。これは、他のチームの動向を牽制する意味合いも含まれているようで、XPRIZEがいよいよ大詰めに差し掛かりつつあることをうかがわせるものとなっていました。
・関連記事
インターネット時代の天体観測はアマチュア天文家が大きな役割を果たせるようになってきている - GIGAZINE
宇宙開発競争から火星有人飛行まで、膨大な写真と映像でNASAが宇宙飛行の歴史を振り返るムービー「Suit Up」 - GIGAZINE
宇宙の彼方で行方不明だった彗星着陸機「フィラエ」を発見、ミッション終了を間近に控えた相棒「ロゼッタ」が写真撮影に成功 - GIGAZINE
冥王星の写真撮影に惑星探査機「ニューホライズンズ」が成功、ついに人類は太陽系全ての惑星へ到達完了 - GIGAZINE
・関連コンテンツ





in ハードウェア, サイエンス, 取材, Posted by darkhorse_log
You can read the machine translated English article I've been watching the testing of the lu….