




低コストで軽量な四足歩行ロボットが作れるオープンソースプロジェクト「Open Dynamic Robot Initiative」
四足歩行ロボットといえば、ロボット開発企業のボストン・ダイナミクスが開発する「Spot」などが思い浮かびます。Spotは1台当たり800万円以上と非常に高額ですが、より低コストで四足歩行ロボットを構築することを目指すオープンソースプロジェクトが「Open Dynamic Robot Initiative」です。
Open Dynamic Robot Initiative · GitHub
https://github.com/open-dynamic-robot-initiative
Open Dynamic Robot Initiative
https://open-dynamic-robot-initiative.github.io/
The Open Dynamic Robot Initiative’s 3D printed robot dog can now be remote-controlled - 3D Printing Industry
https://3dprintingindustry.com/news/the-open-dynamic-robot-initiatives-3d-printed-robot-dog-can-now-be-remote-controlled-196801/
Open Dynamic Robot Initiativeはマックス・プランク研究所のMovement Generation and Control Group、ニューヨーク大学工学部、フランス国立科学研究センターのLaboratory for Analysis and Architecture of Systemsなど、複数のロボット関連研究機関が主導する共同オープンソースプロジェクトです。プロジェクトは当初、さまざまなロボット構築に利用できる低コストのアクチュエーターの開発からスタートし、最終的にはロボット研究コミュニティが求める低コストかつ軽量なロボット開発を目標としています。
実際にOpen Dynamic Robot Initiativeが開発する四足歩行ロボットがどのようなものかは、以下のムービーを見るとよくわかります。
Introduction Video - Open Dynamic Robot Initiative - YouTube
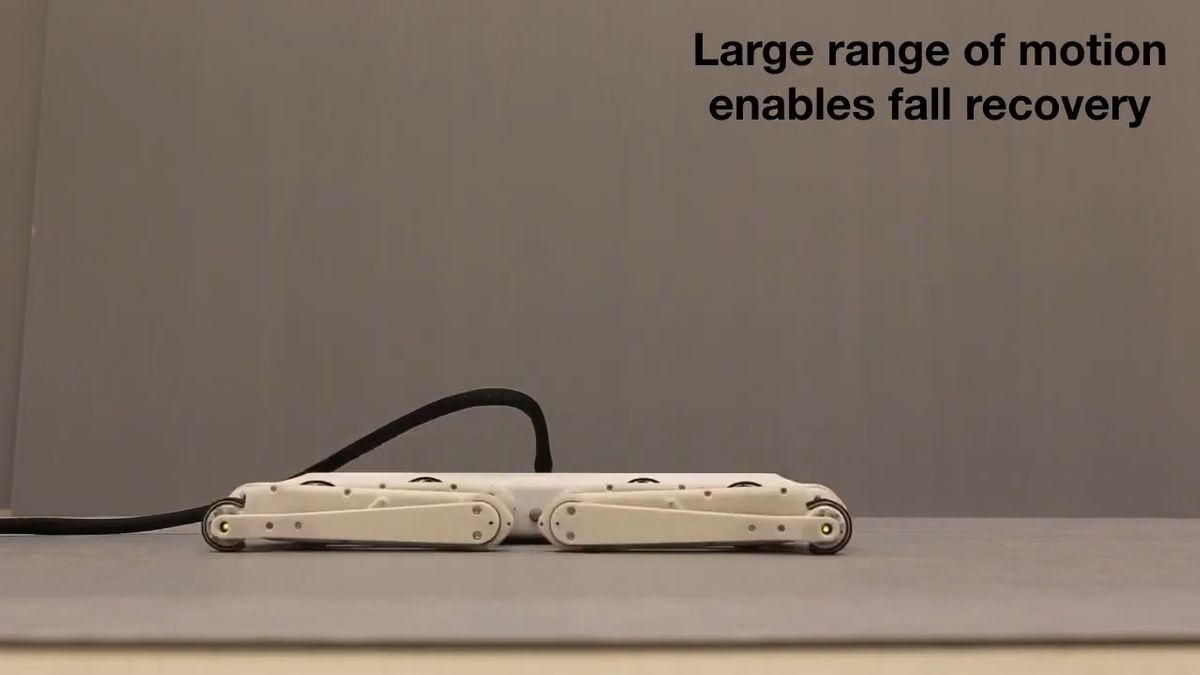
Open Dynamic Robot Initiativeが開発する四足歩行ロボットがこれ。四本の足を折りたたんだ状態から……
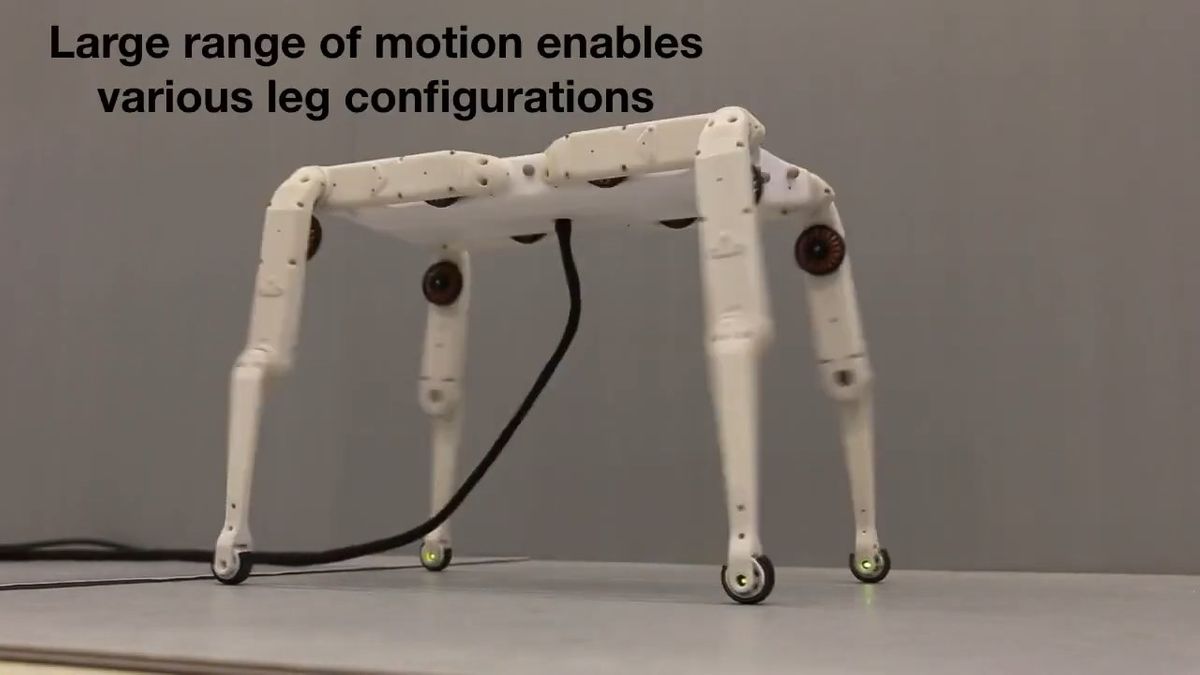
スムーズに直立することが可能。
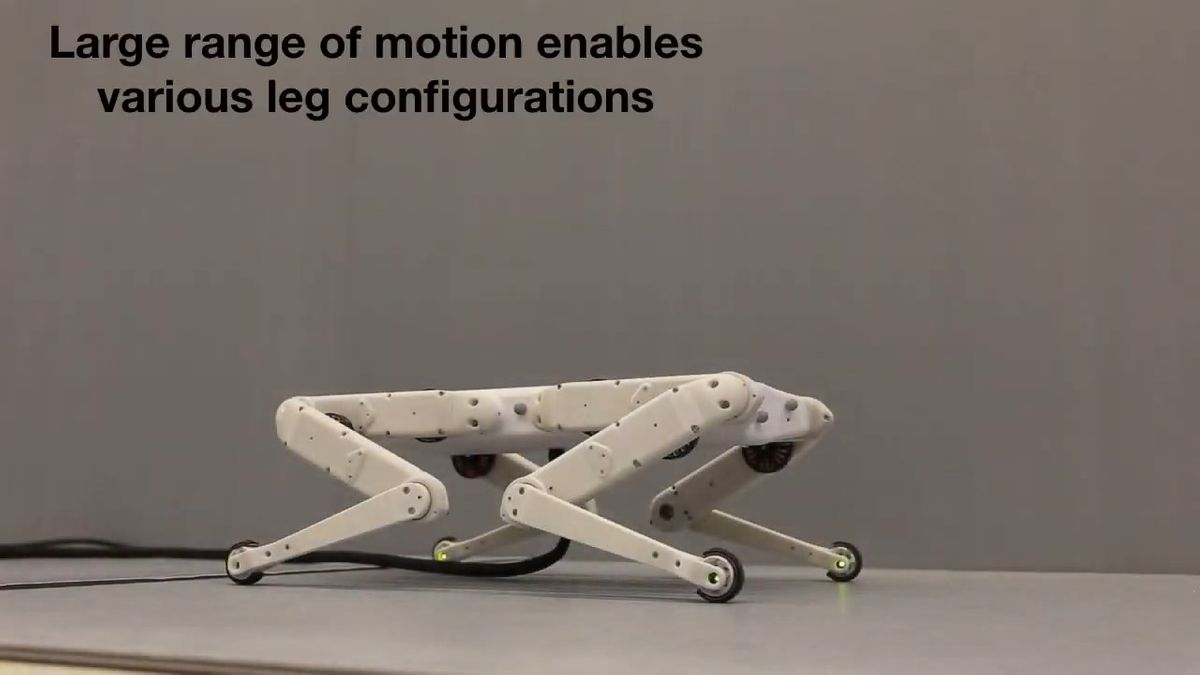
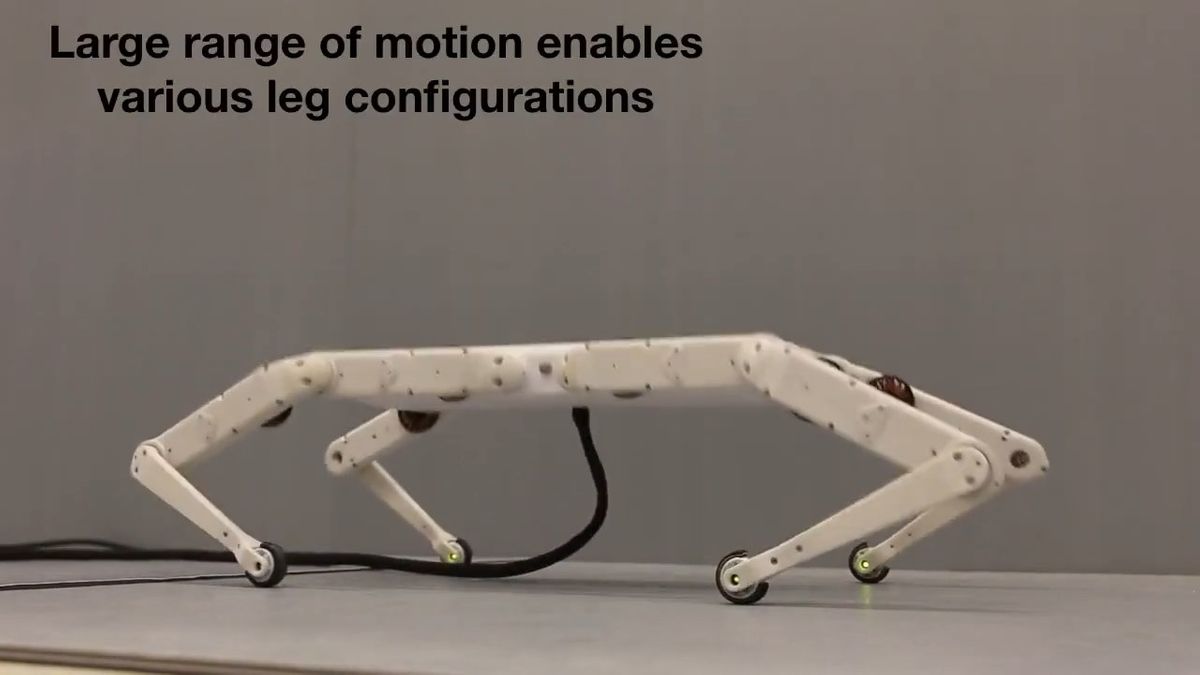
さらに、そのままの動きで関節を逆側に曲げてしゃがむことも可能です。
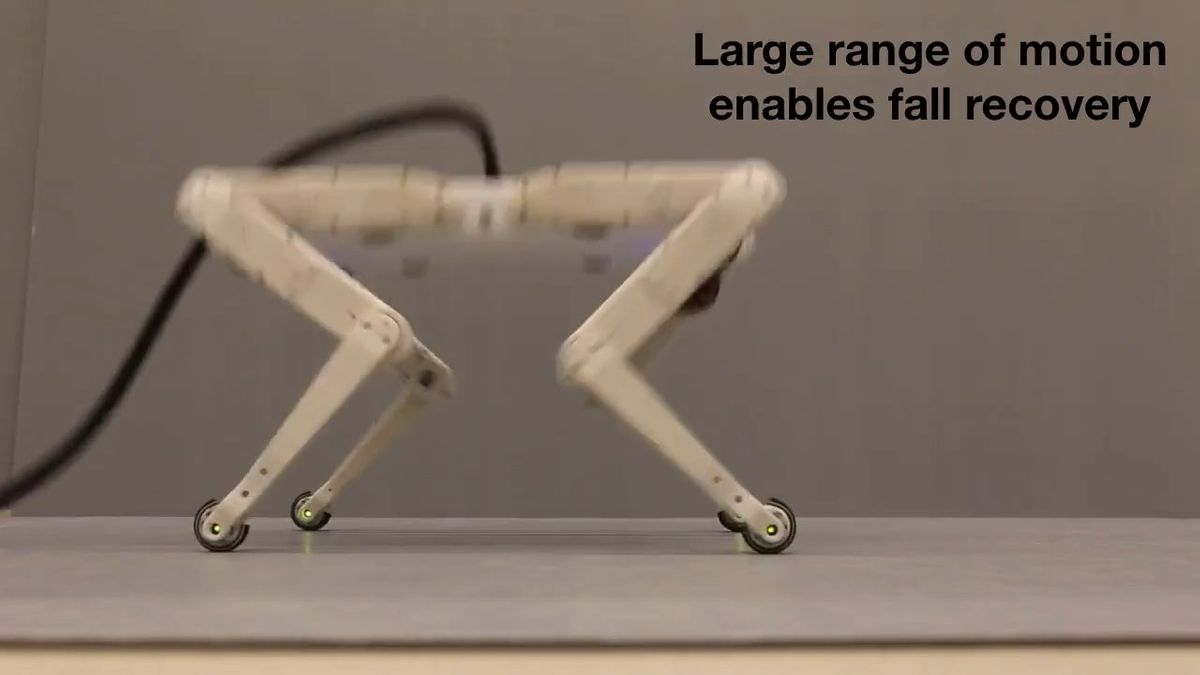
わざと乱暴に倒して……
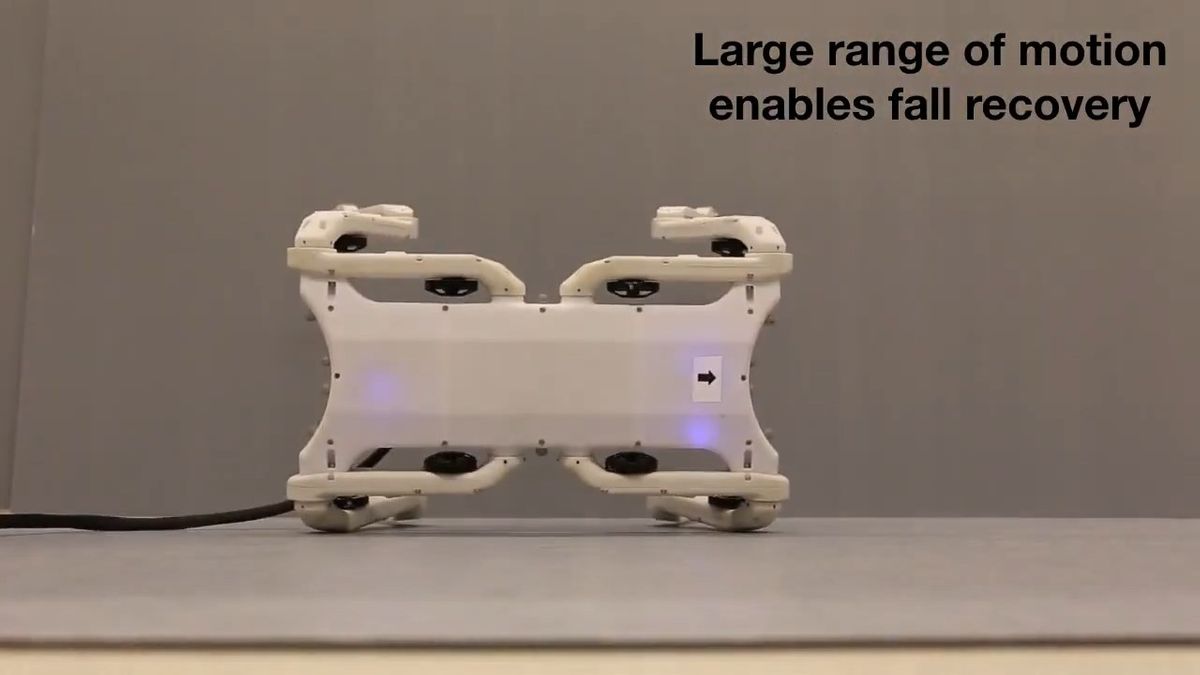
ひっくり返した状態のまま放置。
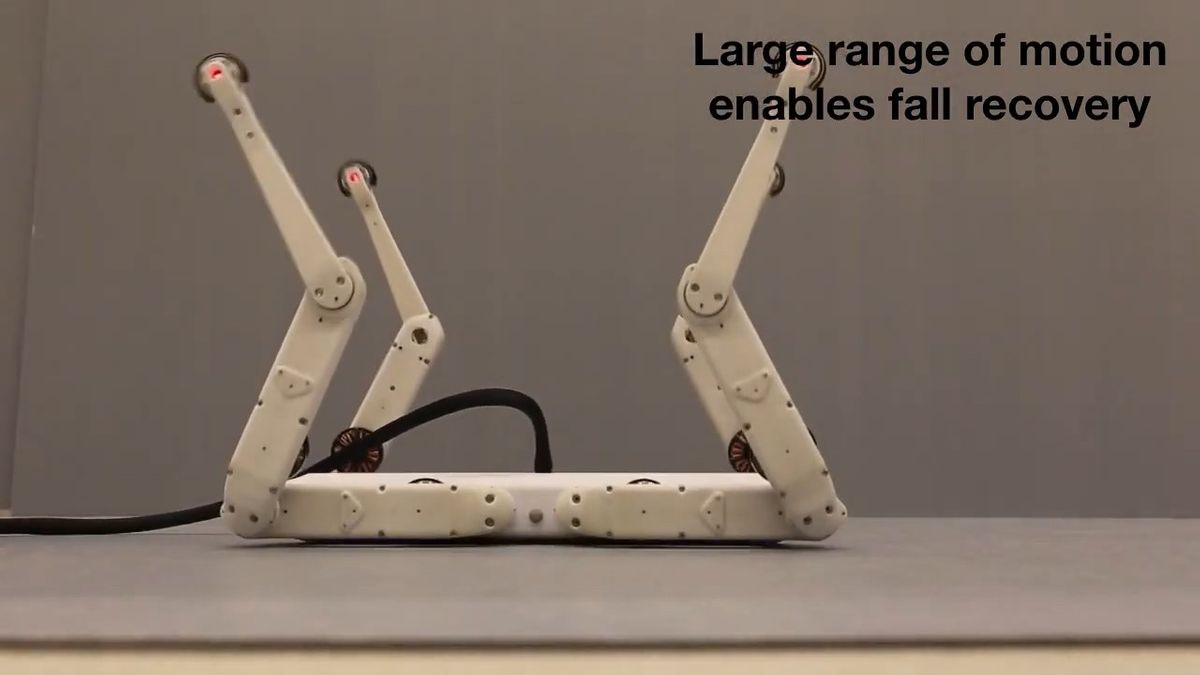
この状態から足を折りたたみ……
反転せずに立ちあがることもできます。
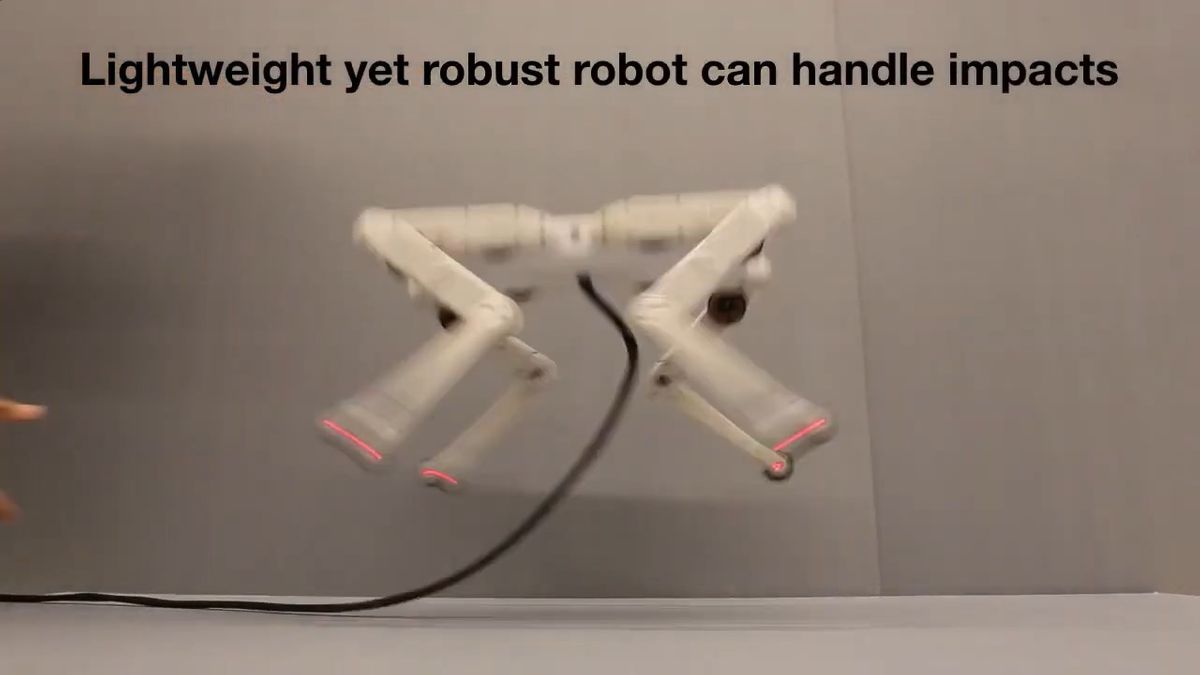
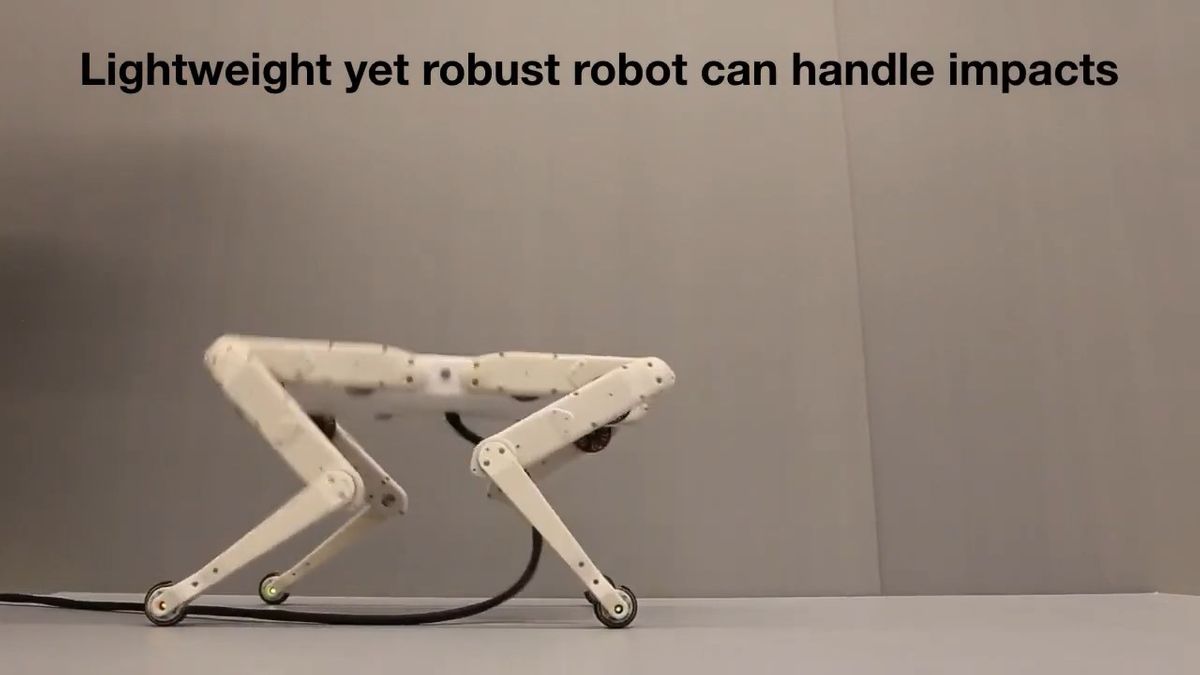
また、ロボットは非常に軽量かつ頑丈なため……
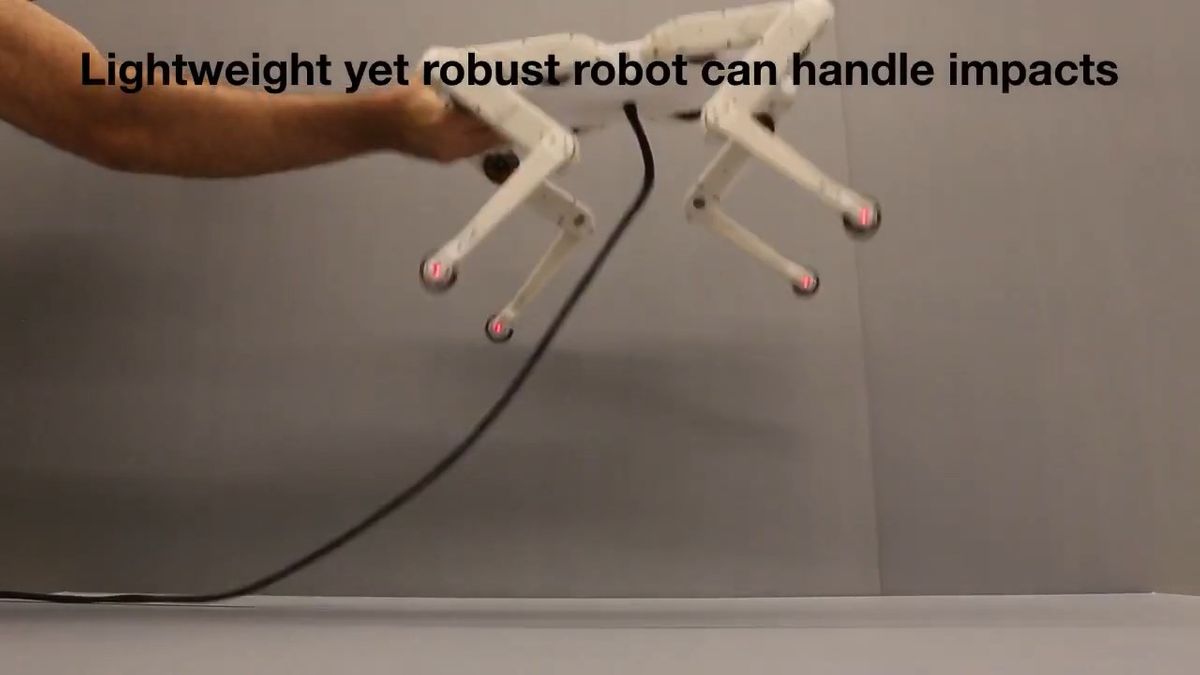
雑に落としても壊れません。
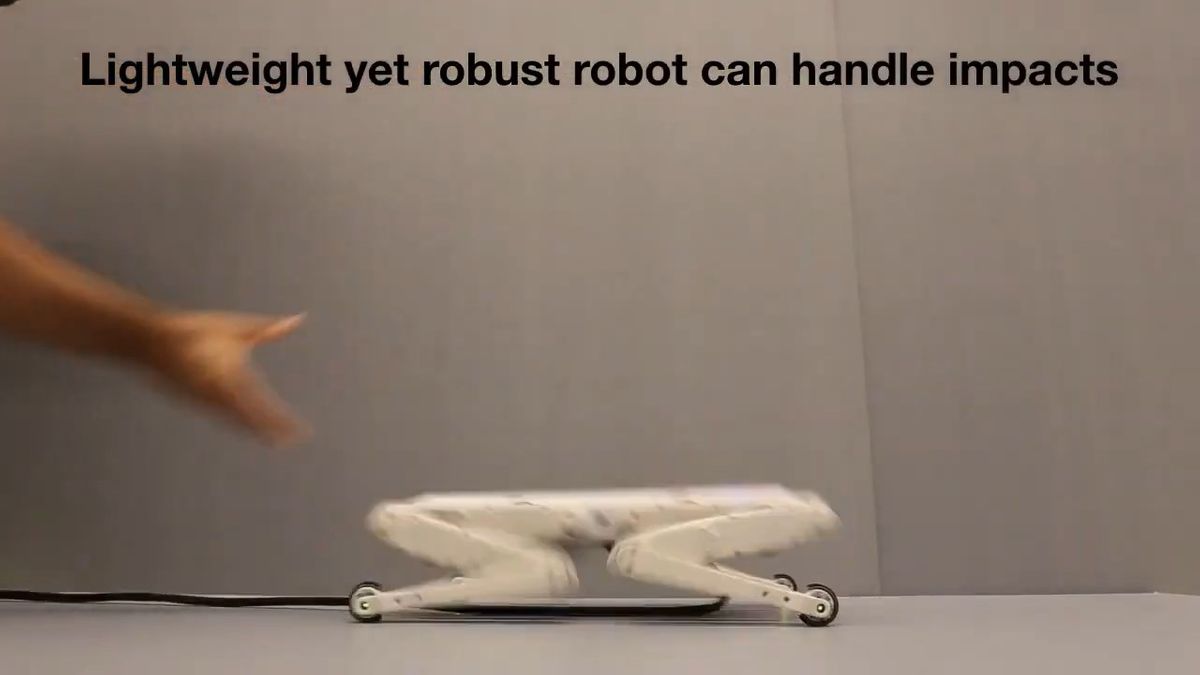
バウンドするほどの衝撃でも、四本足で衝撃を吸収することが可能です。こうした耐久性テストや激しい動作を行わせる強化学習は、高コストのロボットを使うには危険すぎますが、低コストで構築できる四足歩行ロボットであれば比較的容易に実験することができます。
上から棒で押しても……
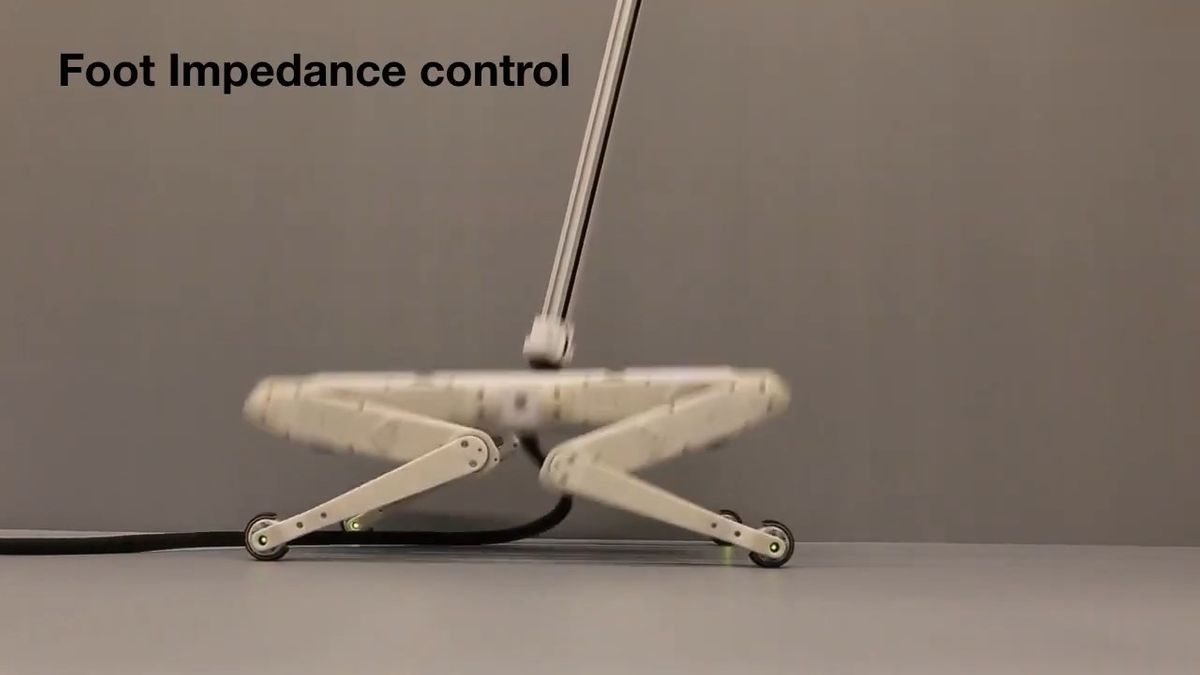
姿勢を安定させることができます。
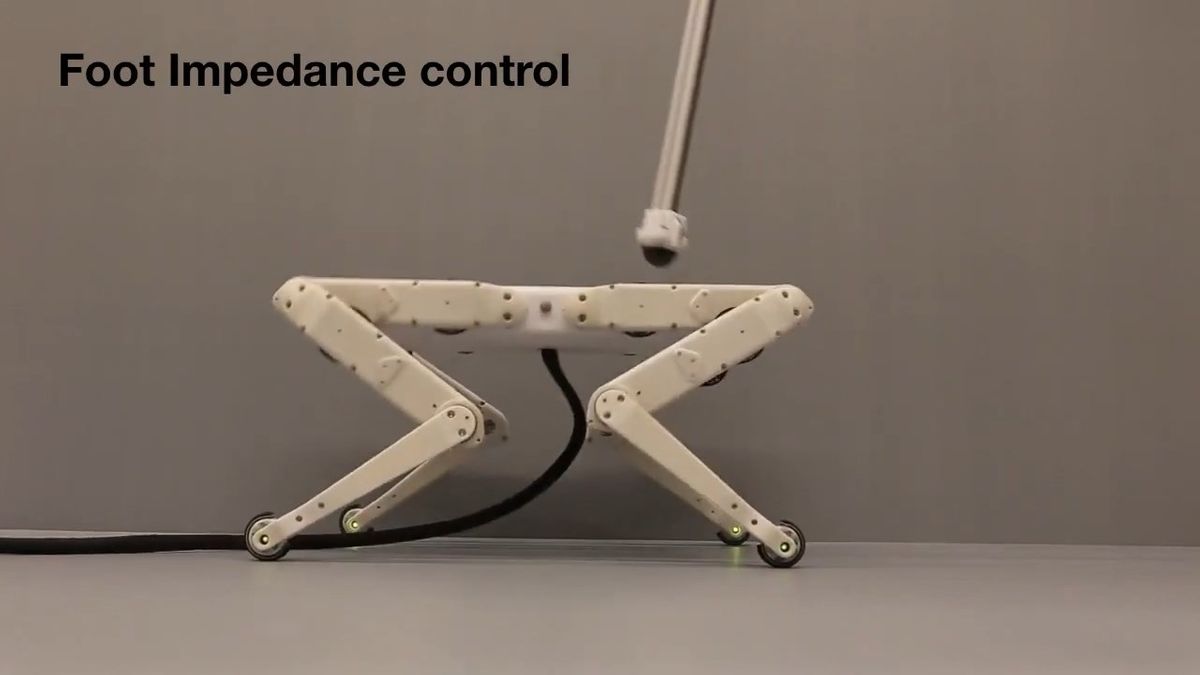
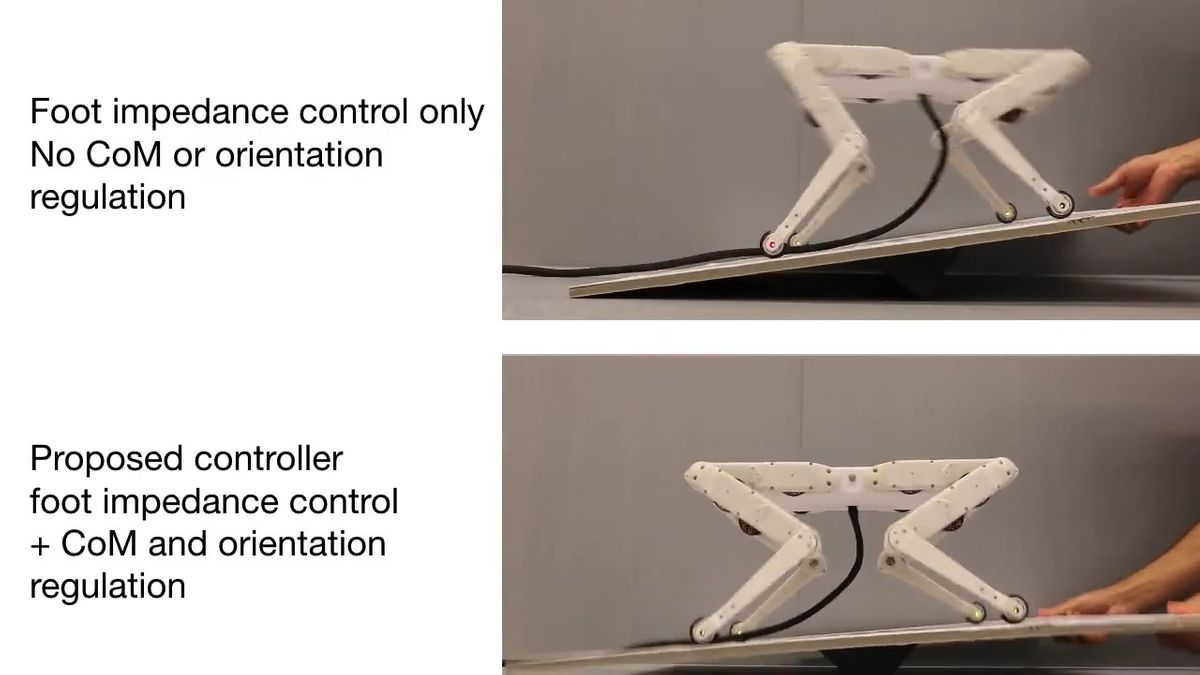
胴体を水平に保つ高度な姿勢制御ソフトウェアも開発されています。
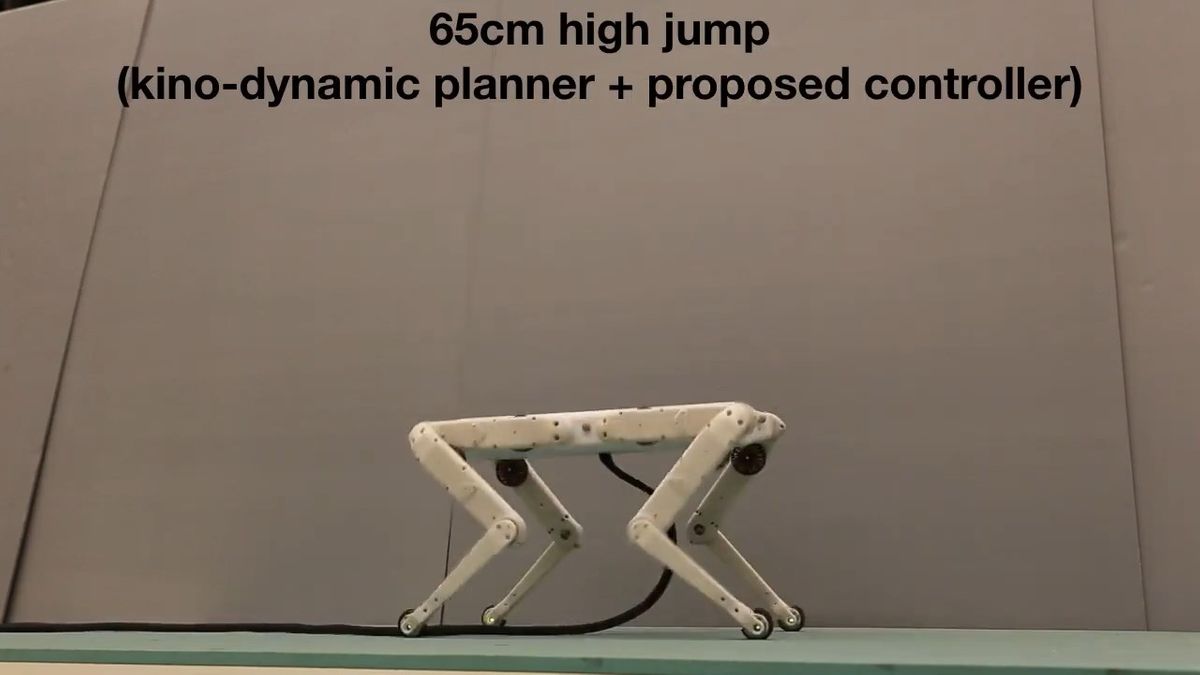
さらに、その場で足を折り曲げて……
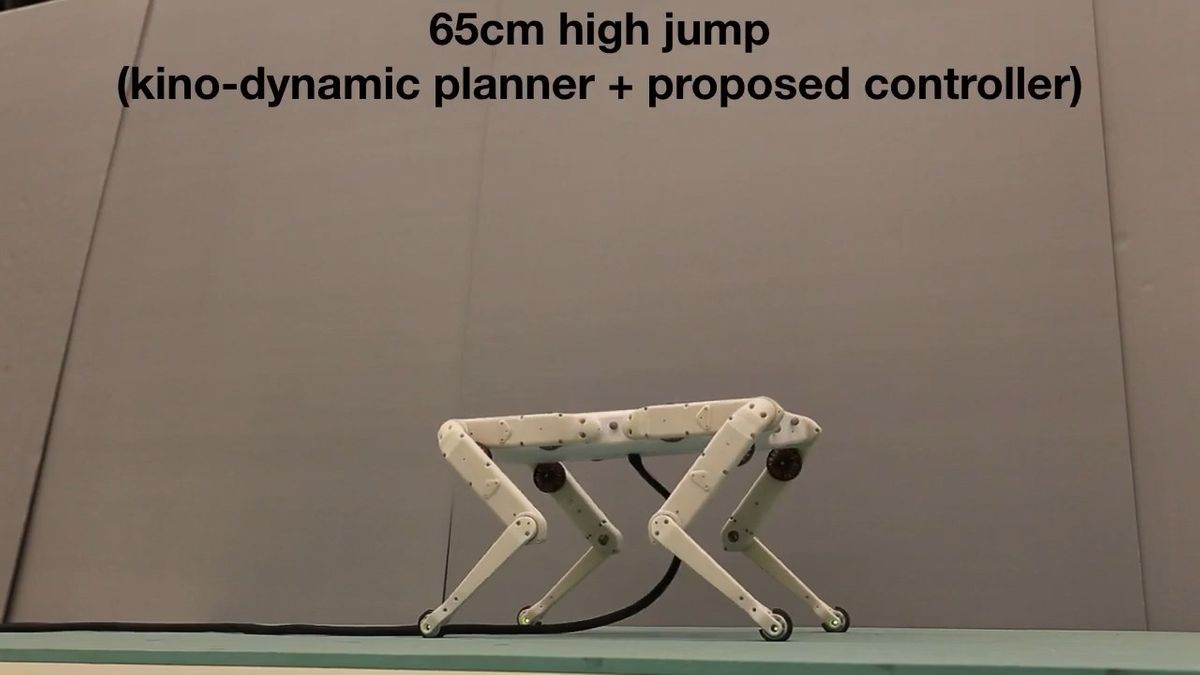
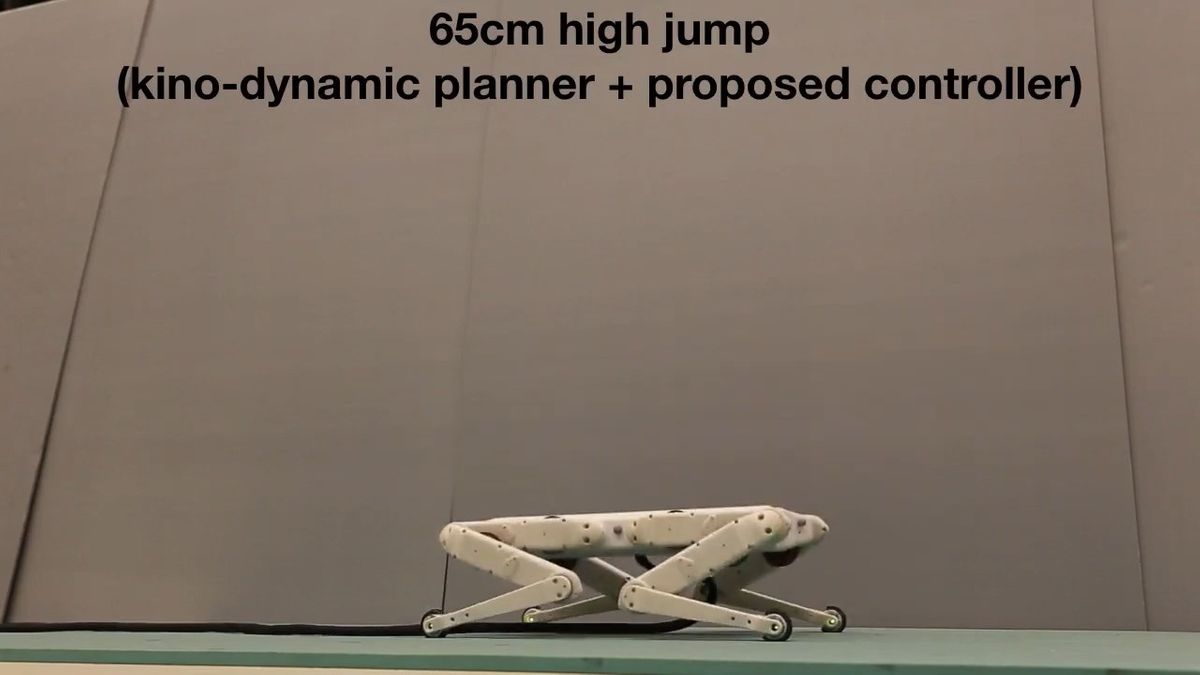
勢いよく垂直にジャンプすることも可能。なんと65cmも飛び上がることができるそうです。
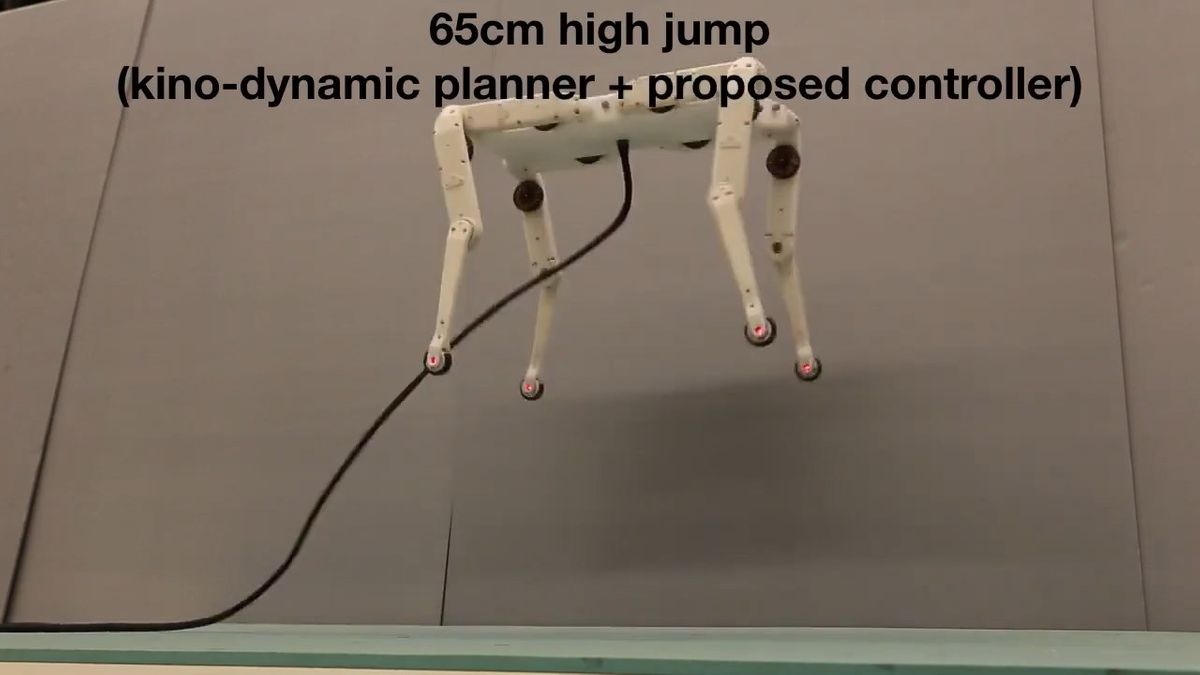
着地も問題なし。
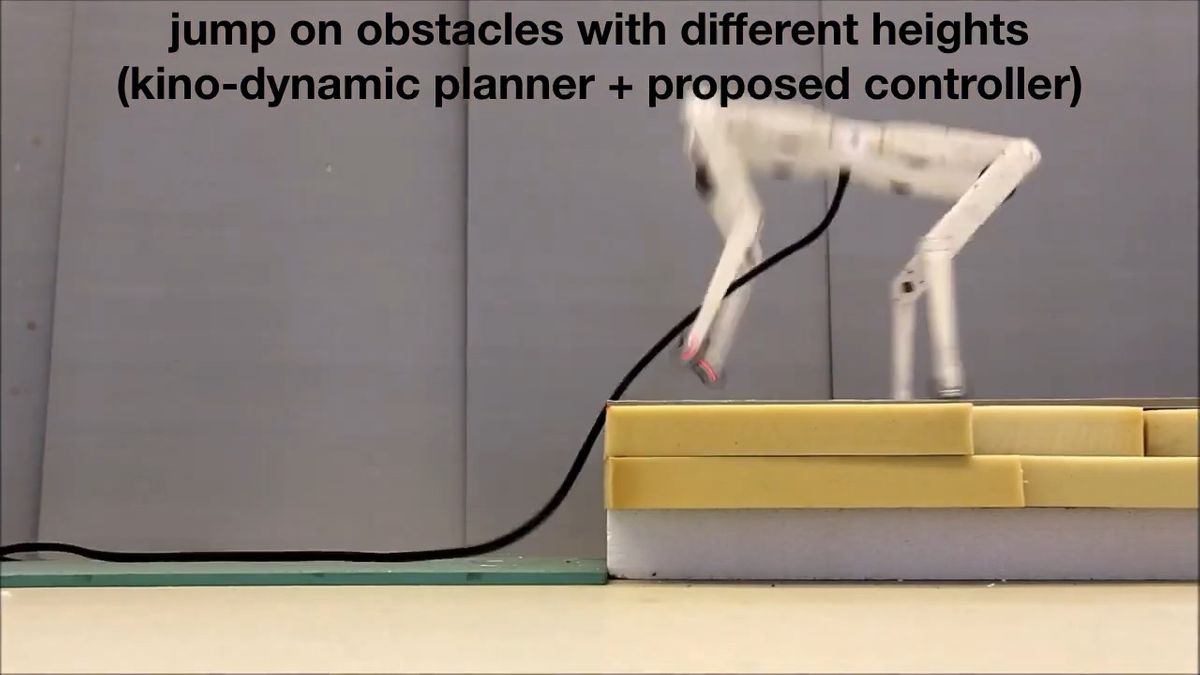
目の前の段差に向かってジャンプし……
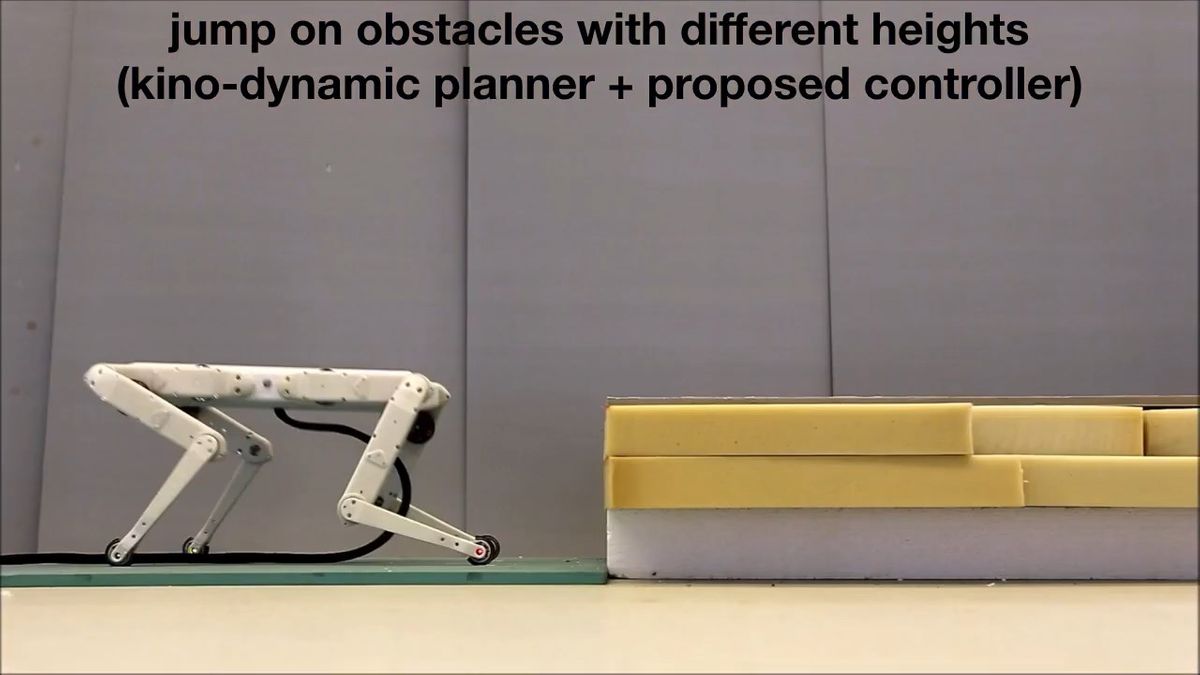
飛び乗ることもできます。
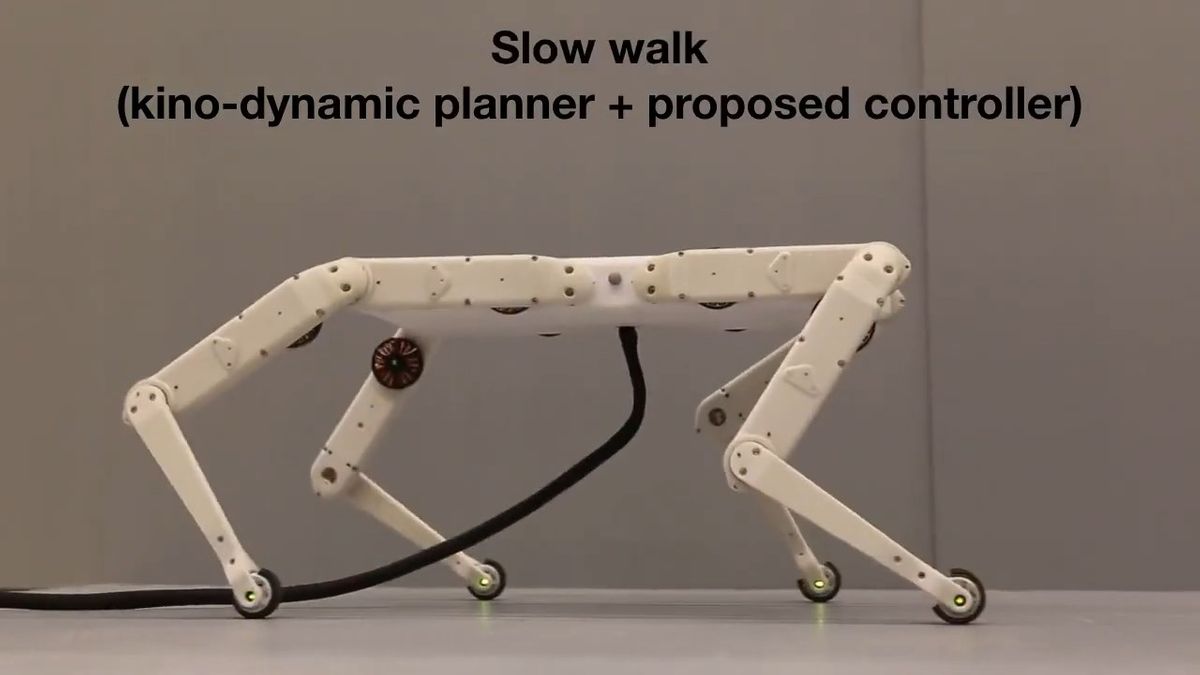
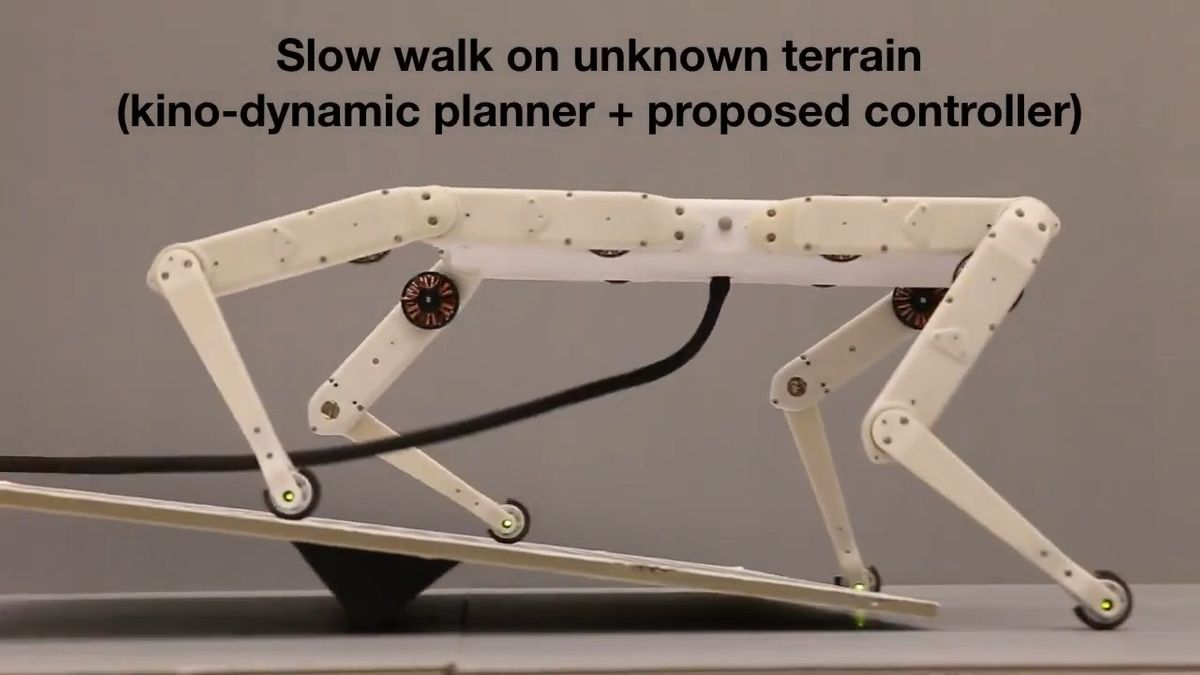
さまざまなスピードで歩くことも可能です。
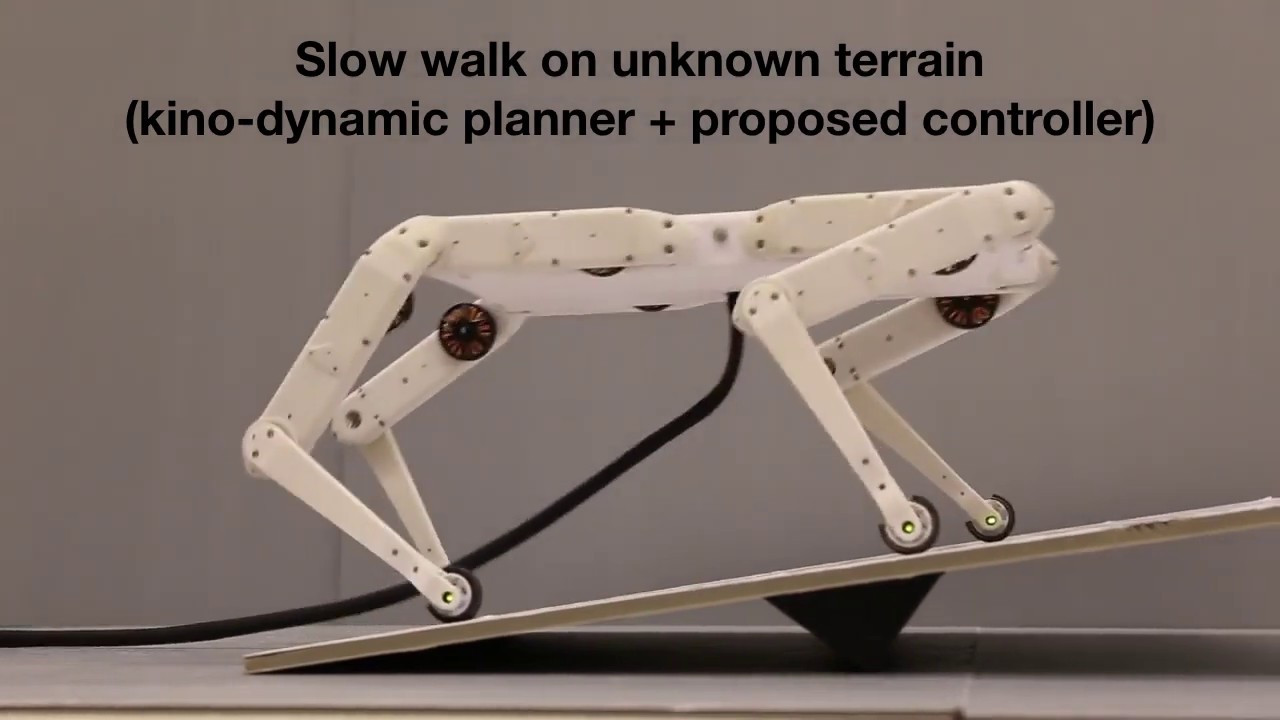
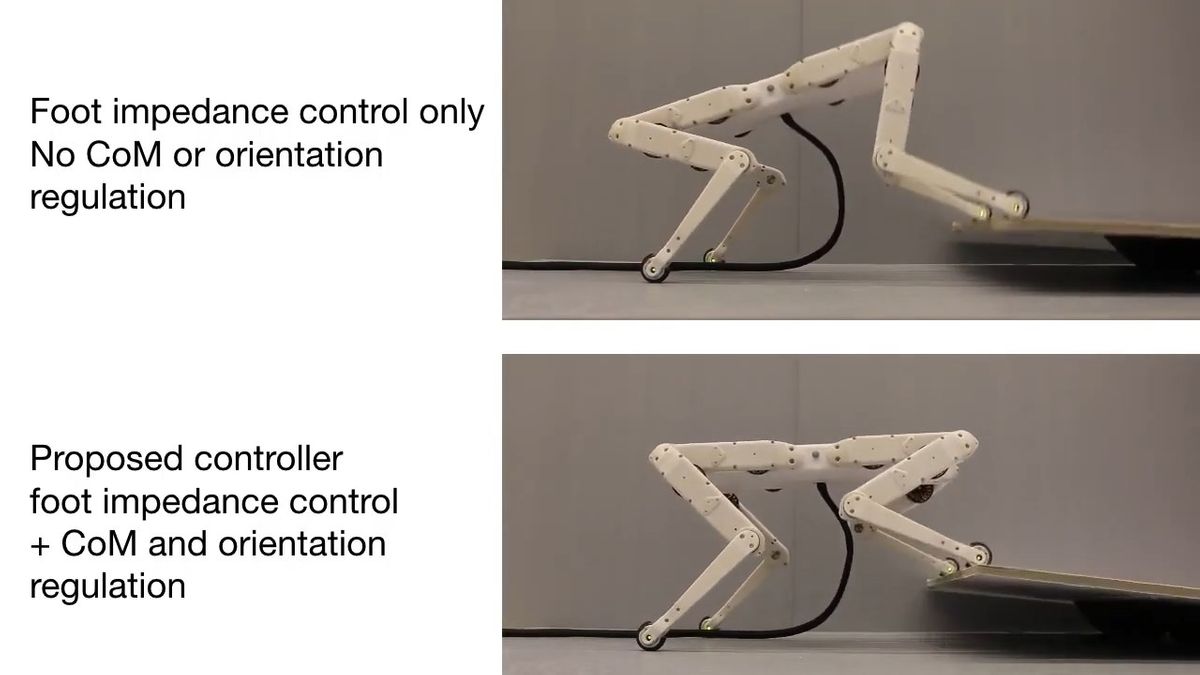
坂道を上り……
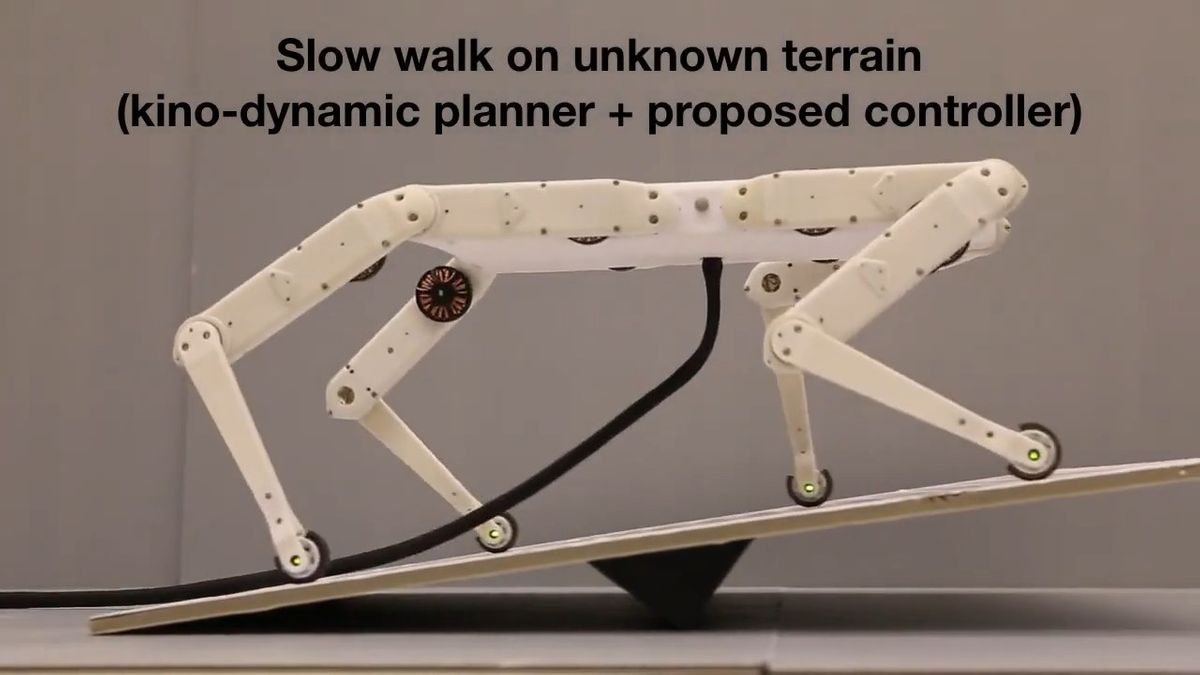
途中で勾配の向きが変化しても対応できました。
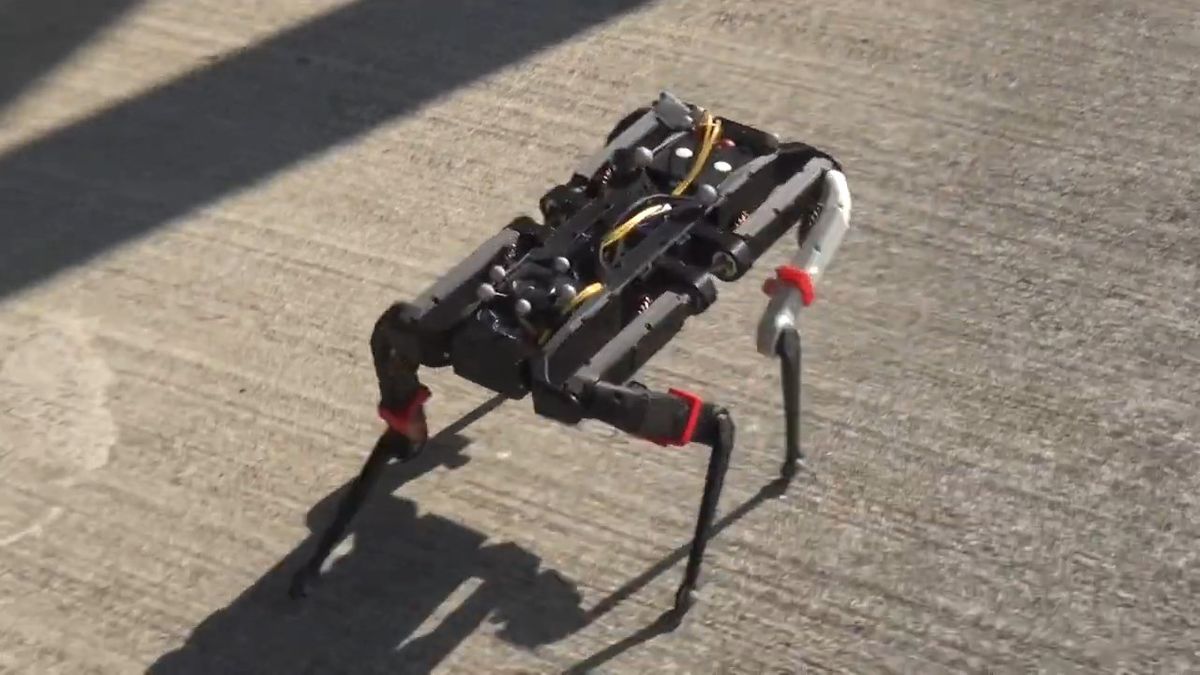
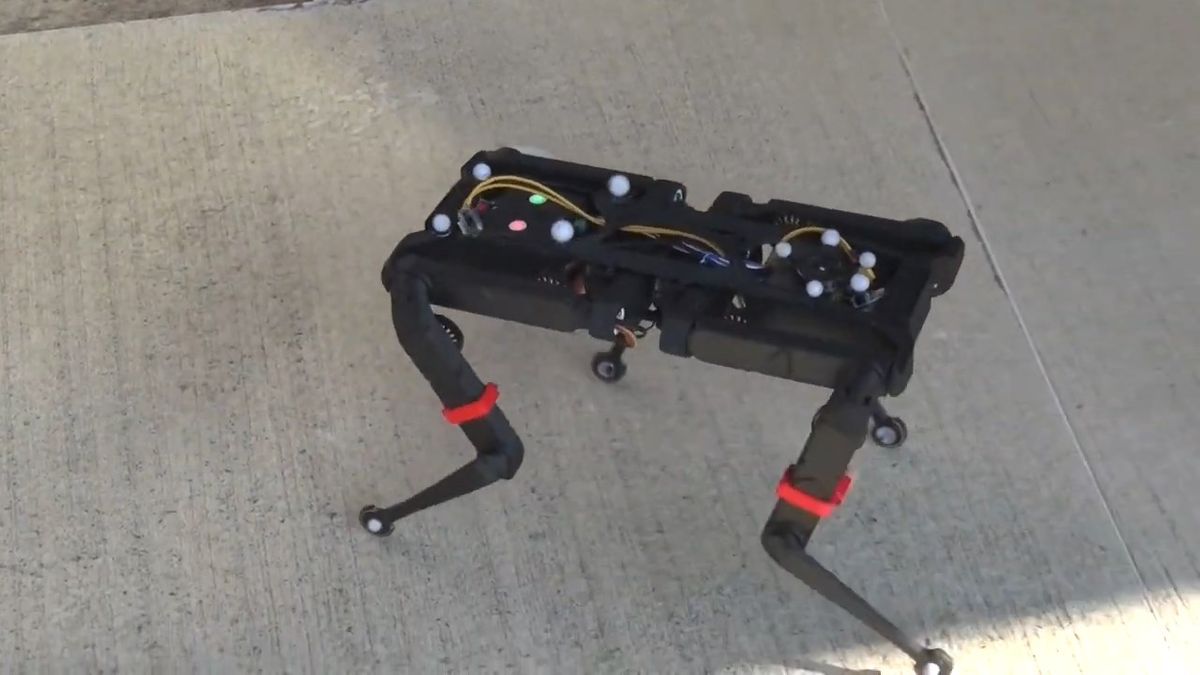
また、最新バージョンの「Solo12」にはバッテリーと無線通信装置も搭載され、Wi-Fiによる遠隔操作が可能となっています。
Solo12 outdoor experiment at LAAS, Autonomy Update - YouTube

折りたたまれていた状態からすっと立ち上がるSolo12。

その場で足踏みを開始し……

歩き出しました。
方向転換もスムーズです。
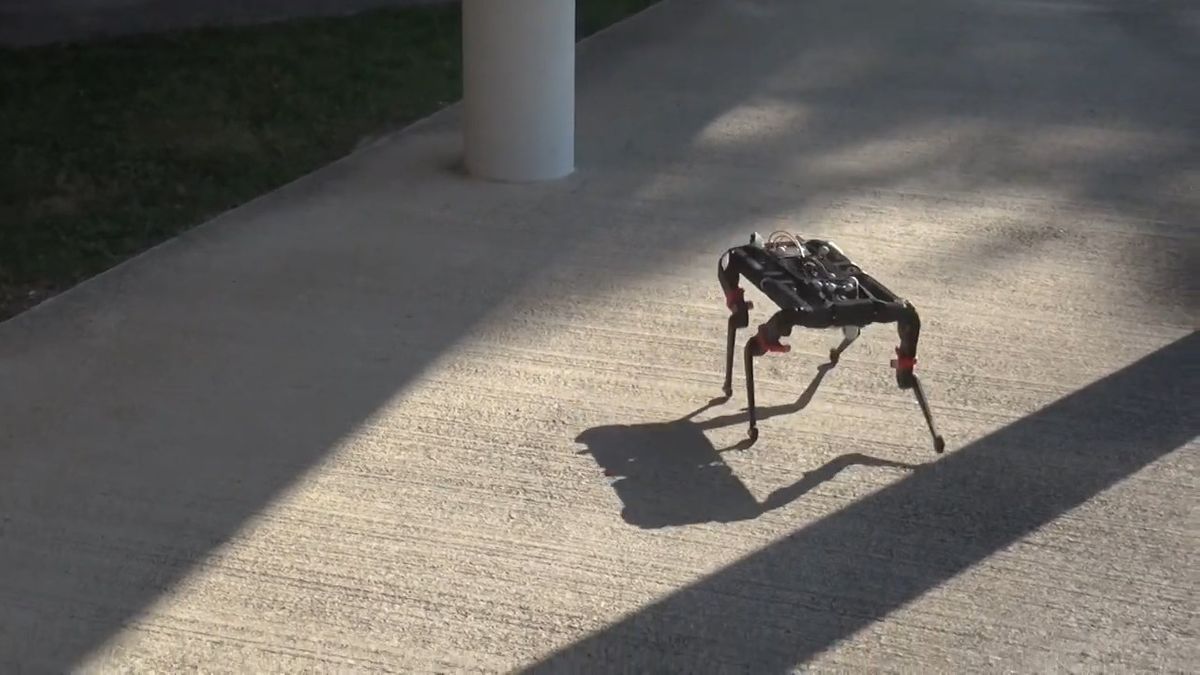
未舗装の草地も問題なく歩くことが可能。

本体とデスクトップコントローラーはWi-Fiで通信しており、デバイスの閉ループ制御は別のPCで行われているとのことです。

画面の左端にチラッとコントローラーらしき物体を持つ男性の姿が映りました。

Solo12はWi-Fiの電波が届く限り操作できますが……

電波が届かなくなると、その場にパタンと倒れてしまいました。

通信可能距離はおよそ30mほどだそうです。

Open Dynamic Robot Initiativeが開発する全てのハードウェアの図面およびソフトウェアはオープンソース化されており、GitHubで確認することが可能。主要な部品も3Dプリンターで製造可能であるため、他の研究所でも簡単に四足歩行ロボットを作ることができるとのことです。
・関連記事
ボストン・ダイナミクスの四足歩行ロボット・Spotがアメフトのハーフタイムショーでチアリーダーと踊り狂うムービー - GIGAZINE
二足歩行ロボット「Atlas」が跳んではねて後方宙返りを披露するムービーをボストン・ダイナミクスが公開 - GIGAZINE
ボストン・ダイナミクスのロボットたちが軽快なステップで踊り狂うムービーが公開 - GIGAZINE
旋回やジャンプも自由自在なオープンソースの四足歩行ロボット「Stanford Pupper」を実際に組み立てられる詳細な説明書が公開 - GIGAZINE
人が乗ることができるオープンソースの巨大多脚ロボ「Stompy」 - GIGAZINE
自作でゲーム機を作ったエンジニアが製作手順や回路図を公開 - GIGAZINE
約2万円で自作できてSteamVRにも完全対応のオープンソースVRヘッドセット「Relativty」 - GIGAZINE
家電や電気メーターを一元管理し操作の自動化も可能なオープンソースのホームオートメーション「Home Assistant」 - GIGAZINE
はんだごてで自作できるオープンソースの電子書籍デバイス「Open Book」 - GIGAZINE
・関連コンテンツ







in 動画, ハードウェア, サイエンス, Posted by log1h_ik
You can read the machine translated English article 'Open Dynamic Robot Initiative', an open….