二足歩行ロボットに「不安定な足場を歩く方法」を教えることに研究者が初めて成功

足を持つロボットはタイヤを持つロボットと違って障害物の多い場所でも進んでいけるため、災害時に役立つと考えられていますが、一方でロボットがガレキや飛び石の上を歩けるようにするアルゴリズムの開発は難しく難航しています。そんななか、カリフォルニア大学バークレー校とカーネギーメロン大学の研究者は二足歩行ロボット「ATRIAS」に飛び石間の距離や飛び石の高さが異なっても歩行が可能なアルゴリズムを開発しました。
Teaching Bipedal Robots to Step Across Discrete Terrain - IEEE Spectrum
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/dynamic-walking-on-stepping-stones
予測不能な分断された足場に遭遇しても進んでいける二足歩行のロボットは災害救助のほか、宇宙探索、人間向けにデザインされた都会での運用などを可能にします。しかし、近年は二足歩行ロボットのメカニカル・デザインが発達してきたとはいえ、まだまだ実用レベルに達しているとはいえません。最新のロボットであっても準静的な動きが遅く、予期せぬ障害物に対応できなかったり、エネルギー効率が悪かったりするためです。
同様の問題は下肢に装着する外骨格型ロボットにも存在し、外骨格ロボットを利用する多くの人は分断された足場を歩く時につえが必要になるため、完全に両手をあけることができません。
そんななか、カリフォルニア大学バークレー校とカーネギーメロン大学の研究者はロボットとフィードバックアルゴリズムのデザインにより、新しいロボット・アプリケーションを開発。新しいフレームワークは自由度が高く、正確な足取りを保証するだけでなく、外部からの予測できない力にも強いという特徴を持つとのこと。このフレームワークを使った独自のロボットが開発されるとともに、「RABBIT」「ATRIAS」「DURUS」といった既存のロボットにアルゴリズムを適用するとどうなるかもシミュレーションされました。
実験に使われた足場はこんな感じ。
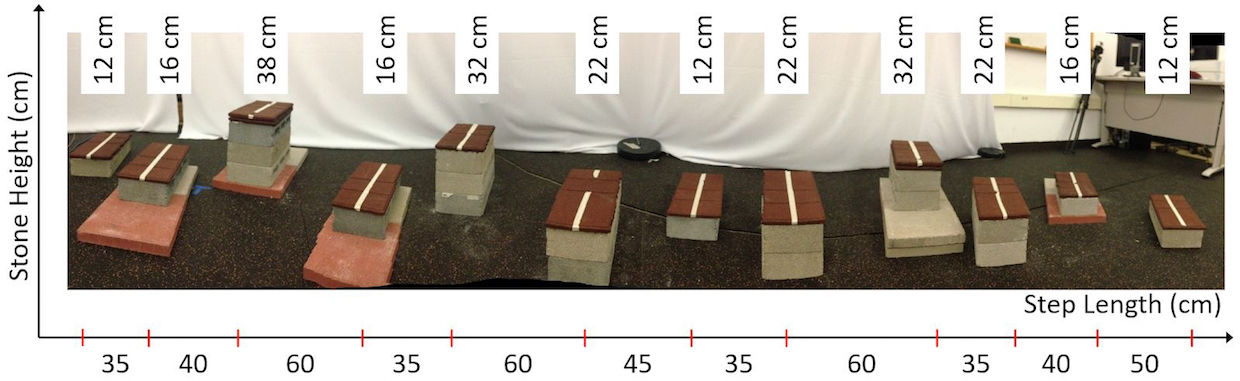
実際にオレゴン大学のDynamic Robotics Labが開発した二足歩行ロボット「ATRIAS」でフレームワークを採用したデモの映像がこれ。ATRIASは自分が歩く足場がどのような状態であるかをあらかじめ知らさてていません。研究者によると、二足歩行のロボットが高さや距離の異なる足場での動歩行に成功したのは、これが初めてとのこと。
Dynamic Bipedal Locomotion over Stochastic Discrete Terrain - YouTube

二足歩行ロボットは、複雑な非線形微分方程式によって制御される自由度の高いシステムを持ちます。このようなシステムは絶えず地面と相互作用し複雑な力学を捉えねばならないため、「複雑な足場を進むロボット」の開発は非常に難しくなります。また、ATRIASにようなロボットは足首にアクチュエータを持たないため、人が竹馬に乗って歩いている時のように、バランスを取るには「歩き続ける」しかないという問題点もあります。さらに、モーターにおけるトルクの限界や摩擦といった要素が加わり、「ロボットをコントロールするプロセスのデザイン」が非常に重要になってくるわけです。

一方で、研究者によって開発されているロボットは記事作成時点で「盲目」の状態。そこで、次なるステップとして、研究者はロボットに周囲の環境についての情報を与えるため、ディープラーニングといったアルゴリズムの統合を試みているとのこと。これによりロボットは周囲の環境を推定し、システムを完全に自動化できるものとみられています。研究者によると、ダチョウのように歩く二足歩行ロボット「Cassie」が間もなくカリフォルニア大学バークレー校に到着する予定であり、実験が行われる模様です。
Cassie - Next Generation Robot - YouTube
・関連記事
ボストン・ダイナミクスの新映像は「ドアノブをつかんでドアを開ける」4足歩行ロボット - GIGAZINE
ボストン・ダイナミクスの4足ロボット「SpotMini」改良版はキモさが少し減退 - GIGAZINE
人型ロボ「アトラス」が倒されても荷物を奪われてもめげずに任務を遂行するシュールなムービー - GIGAZINE
ターミネーターの世界がついに到来、人型ロボット「アトラス」がラボの外へ - GIGAZINE
コウモリや「バック転で逃げるクモ」など自然の生き物を驚くほどリアルにメカで再現したロボット - GIGAZINE
・関連コンテンツ