




走行しながら障害物を認識して飛び越える驚異の技術を実現する四足歩行の「チーターロボット」が登場

不気味な動きで注目されたGoogleの四足歩行ロボットから、蹴られても倒れない高性能四足歩行ロボット「Spot」が開発されるなど、四足歩行ロボットの技術は発展が続いています。そんな中、マサチューセッツ工科大学(MIT)が開発している「チーターロボット」が時速約8kmで走りながら、自律的に障害物を認識して障害物を越えていくことに世界で初めて成功している様子が公開されています。
MIT cheetah robot lands the running jump | MIT News
http://newsoffice.mit.edu/2015/cheetah-robot-lands-running-jump-0529
Watch MIT's Robot Cheetah Jump Over Obstacles | Popular Science
http://www.popsci.com/watch-mits-cheetah-robot-jump-high-over-obstacles
チーターロボットが走って障害物を次々に飛び越えていく様子は以下のムービーから確認できます。
MIT cheetah robot lands the running jump - YouTube

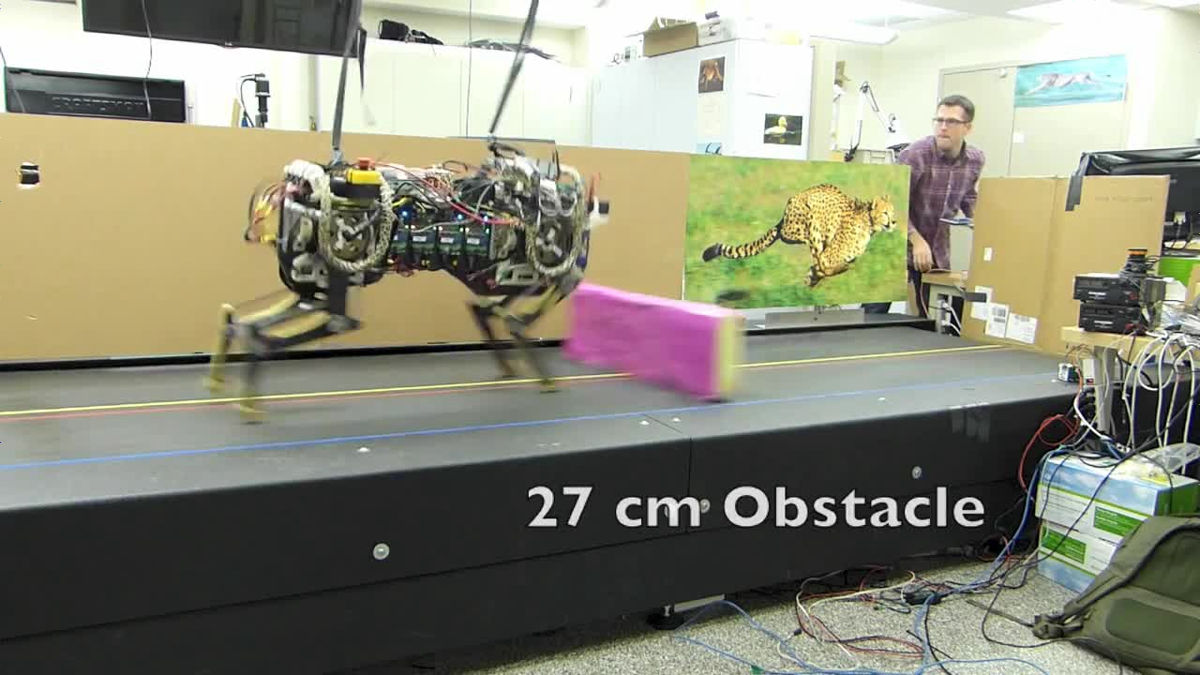
MITが作ったのは自律的に障害物を乗り越えるチーターロボット。トレッドミル(ランニングマシン)の上を時速約8kmでチーターロボットが走っていると、目の前に障害物が流れてきます。
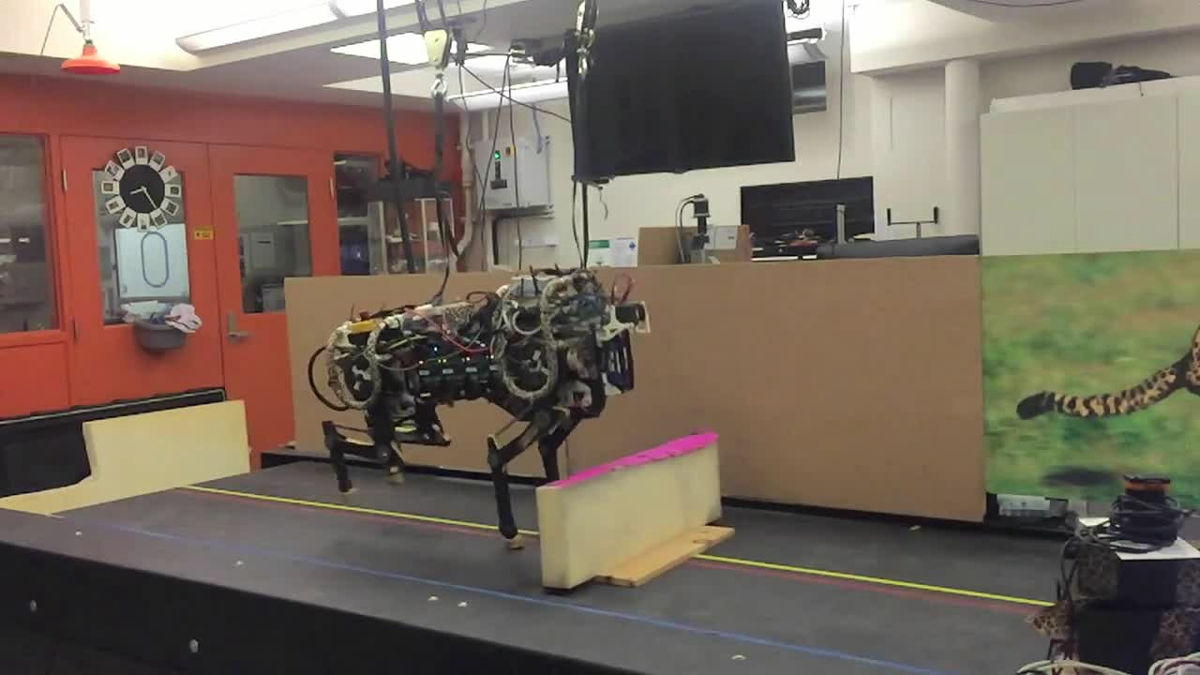
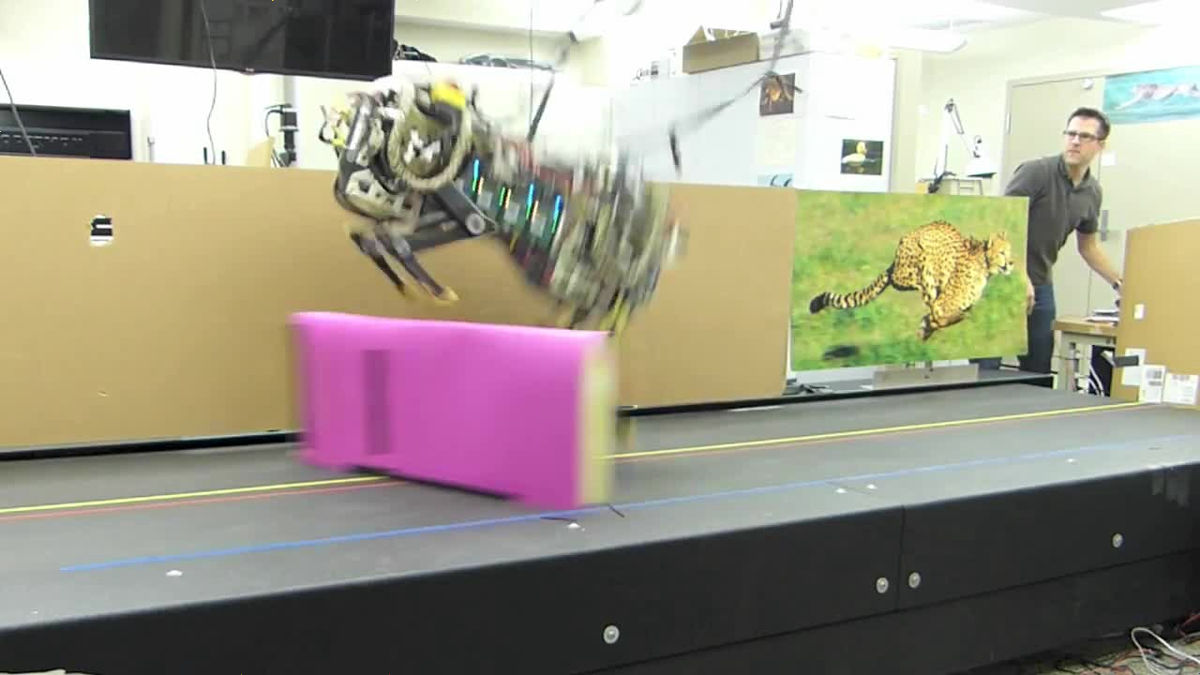
すると、人が何か操作を加えなくても、ピョンっと自動的にジャンプ。
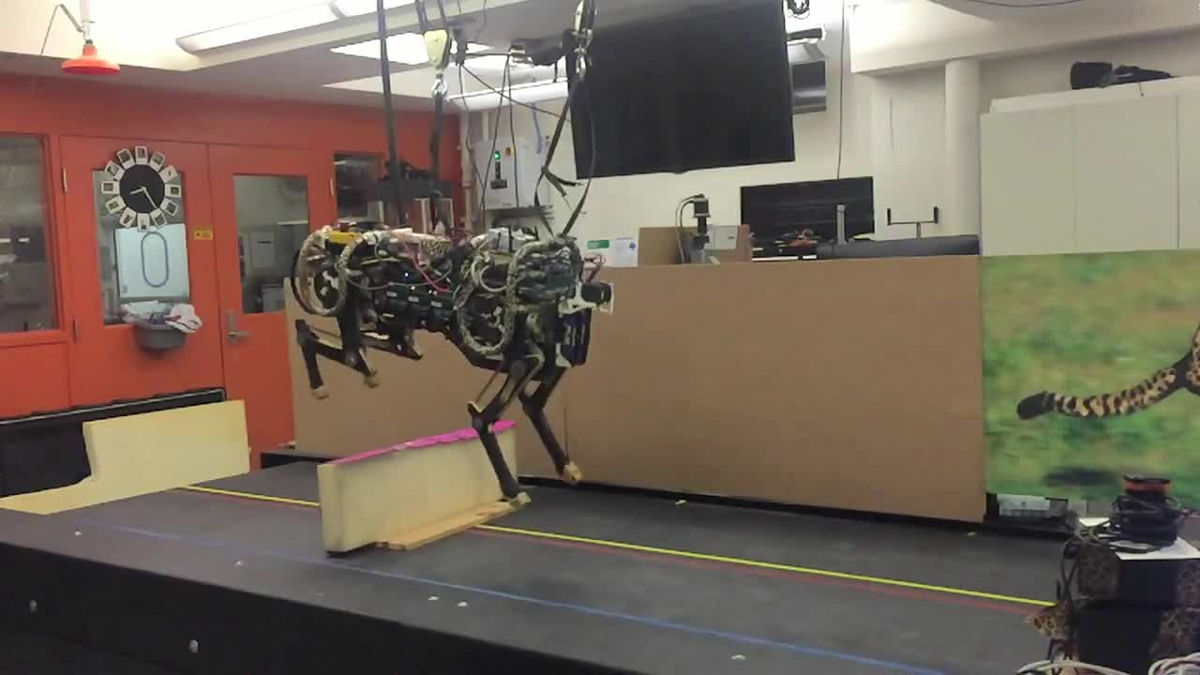
無事着地し、再びタカタカと走り出します。トレッドミルの長さは4メートルですが、チーターロボットが障害物を認識してジャンプを成功させるのに必要な距離は1メートルほどで十分のようです。

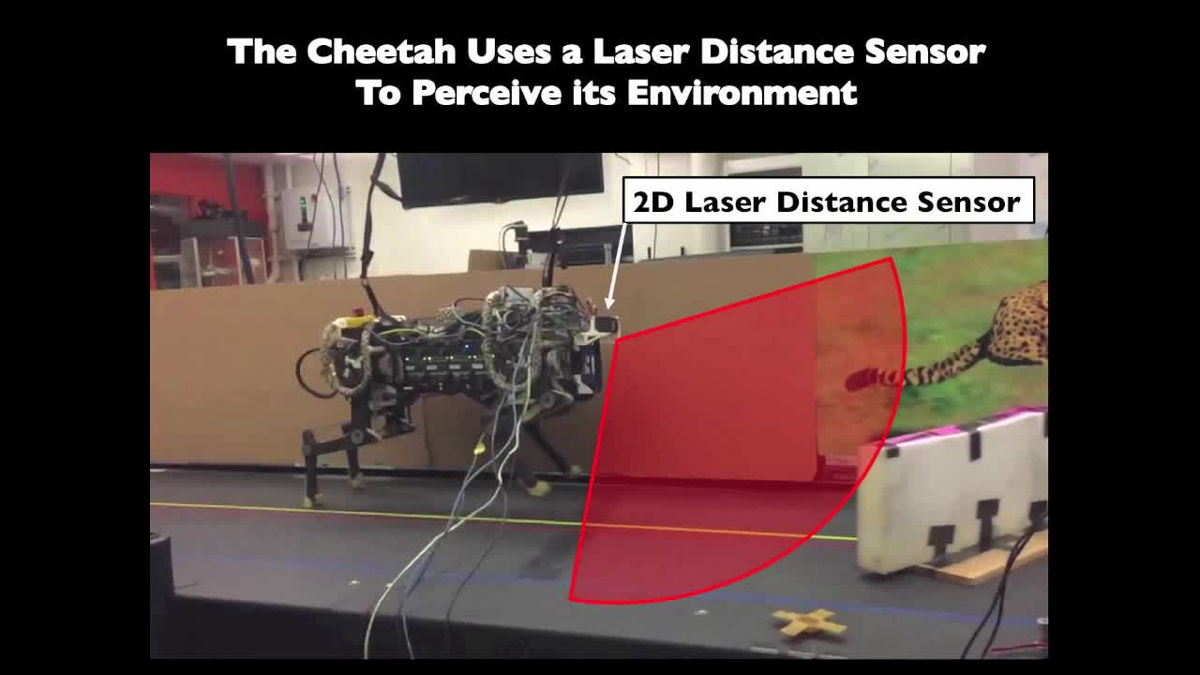
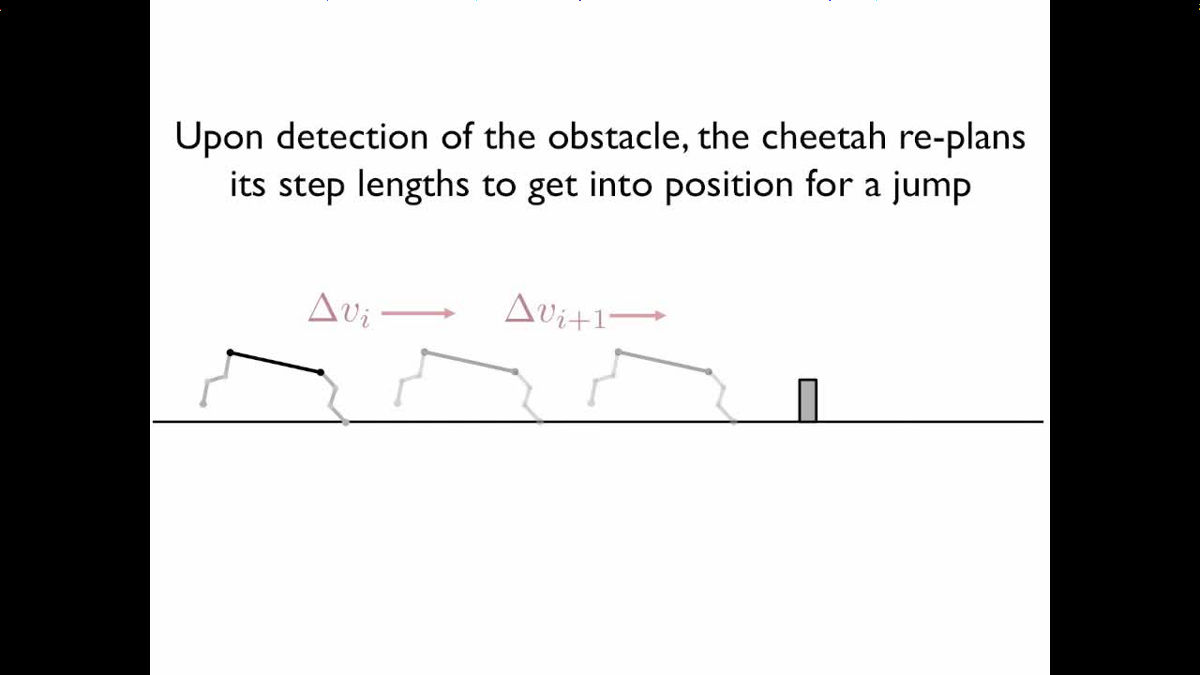
自律的なジャンプを行うために、3つのリアルタイム・アルゴリズムが使われているとのこと。まずは2Dレーザーを使った距離センサーが周囲の環境を把握。
距離センサーによって得られたデータをもとに、迫り来る障害物の高さや、障害物までの距離を理解します。
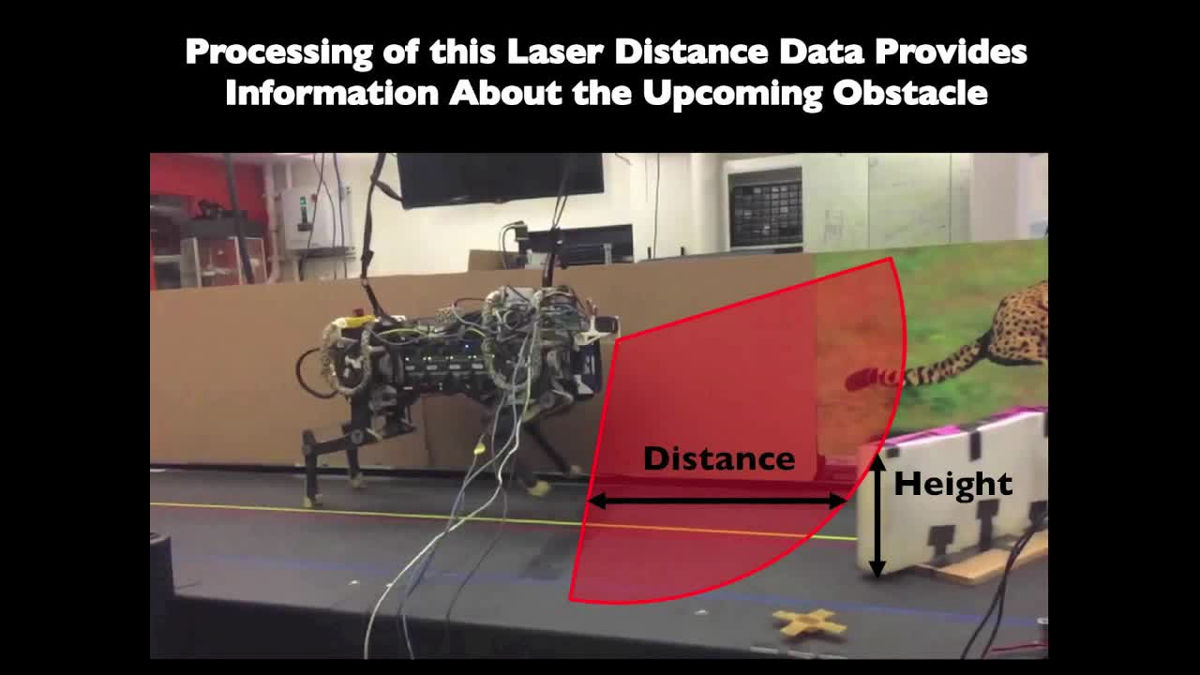
そして、障害物を乗り越えるために必要なジャンプの位置と、そこまでに踏むべきステップの幅などを計算します。
次に、障害物を乗り越えるために必要な足の動きを選びます。
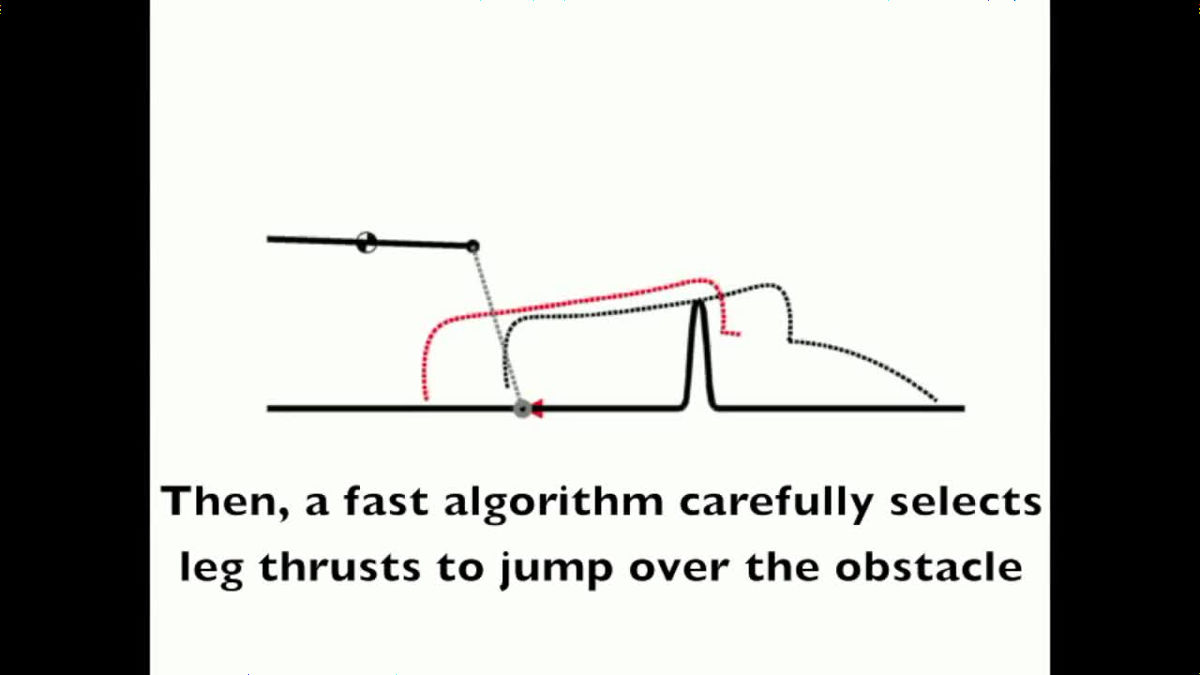
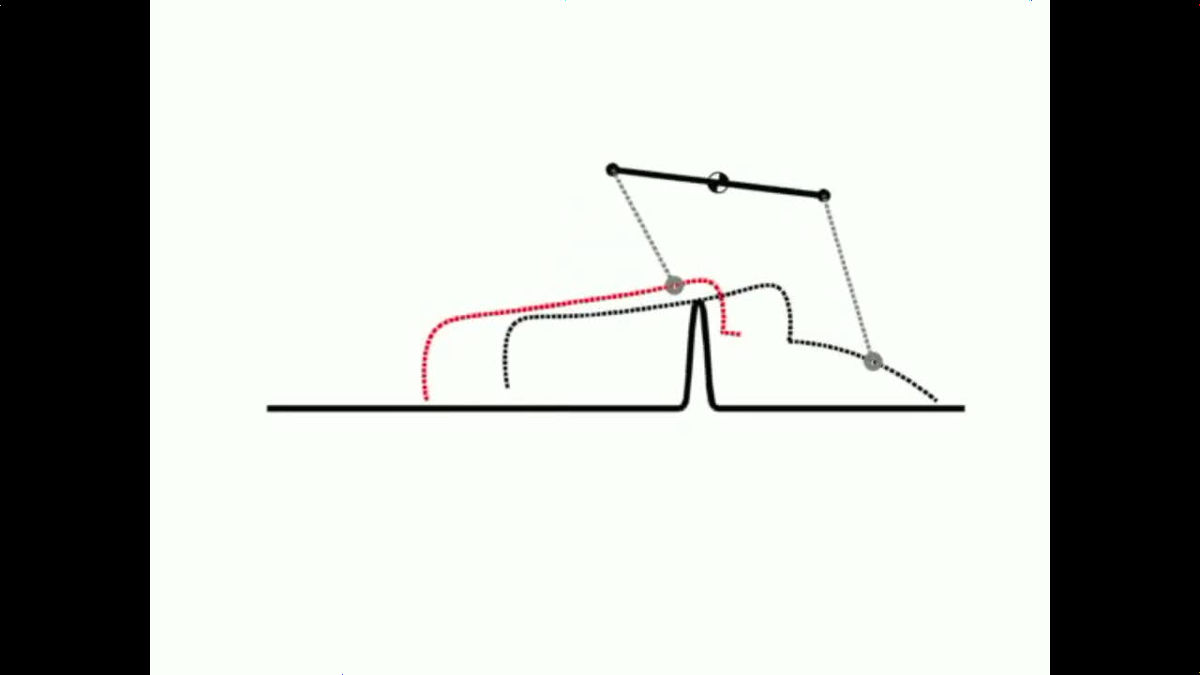
前足と後ろ足の軌跡をあらかじめ計算しておき……
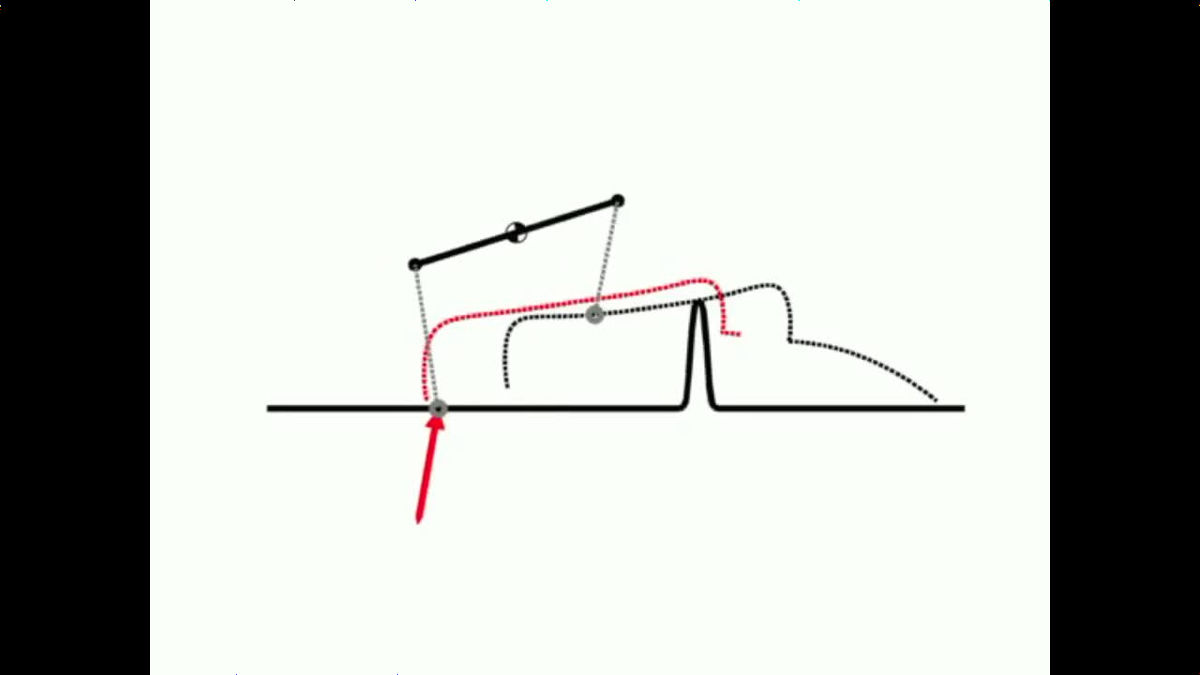
それに従って正確に足を動かしていきます。
このアルゴリズムを使うと、さまざまな高さの障害物でも難なく越えていけるわけです。例えば高さ27cmの障害物でも……
ひょいっとジャンプ。

続いて、それよりも13cm高い、高さ40cmの障害物がやってきても……

アルゴリズムを使って軽々と越えていけるわけです。
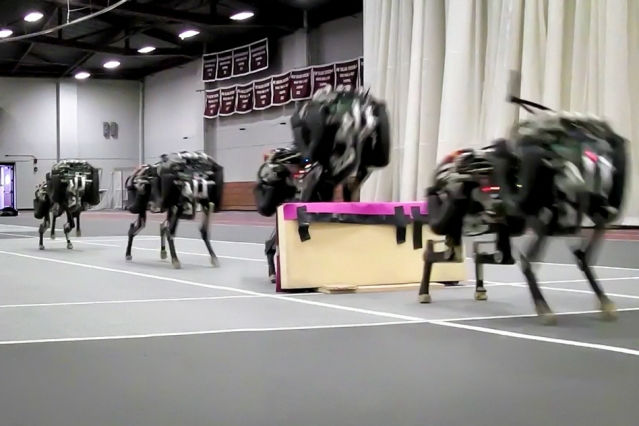
なお、ムービーには連続する障害物を次々と越えていくチーターロボットを横から撮影した様子もあり、その動きの滑らかさ・正確さを確認することができます。

なお、長さ4mのトレッドミル上で行われたテストでは成功率が70%ほどでしたが、広い場所に複数の障害物を並べて置いたテストでは、約90%の成功率を記録したとのこと。チーターロボットが障害物を越えて行く様子はアメリカ国防高等研究計画局(DARPA)のRobotics Challengeで公開されたものであり、研究を率いたSangbae Kim氏らは7月に正式な論文を発表するそうです。
・関連記事
Googleの不気味な四足歩行ロボット「ビッグドッグ」が登場する映画「Young Ones」予告編 - GIGAZINE
Googleが歩行ロボットメーカーのボストン・ダイナミクスを買収 - GIGAZINE
ゴキブリをモチーフにした世界最速の小型ロボット「VELOCIRoACH」誕生 - GIGAZINE
ゴキブリが突然目の前から消える仕組みを再現したロボット - GIGAZINE
機械なのか人間なのか判別不能なレベルのロボットダンス「Robot Nom Nom」 - GIGAZINE
人間に第3・第4の腕を作りだすロボット・アームの開発が進行中 - GIGAZINE
・関連コンテンツ





in 動画, ハードウェア, Posted by darkhorse_log
You can read the machine translated English article Quadruped walking "cheetah robot" to rea….