NVIDIA announces 'Isaac GR00T N1', an open platform model for humanoid robots, useful for developing general-purpose robots that can operate in a variety of environments

NVIDIA announced the Isaac GR00T N1 , an open platform model for humanoid robot development, at NVIDIA's developer conference,
Accelerate Generalist Humanoid Robot Development with NVIDIA Isaac GR00T N1 | NVIDIA Technical Blog
https://developer.nvidia.com/blog/accelerate-generalist-humanoid-robot-development-with-nvidia-isaac-gr00t-n1/
NVIDIA Isaac GR00T N1: An Open Foundation Model for Humanoid Robots - YouTube
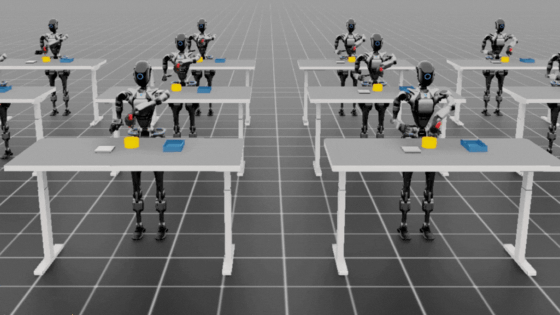
Humanoid robots are designed to adapt to human workspaces and perform repetitive or demanding tasks, but developing a general-purpose robot that can handle diverse tasks and unpredictable environments is difficult. Traditionally, a dedicated AI model was required for each task, and training them from scratch required huge amounts of data, high computational costs, and limited versatility.
To address these challenges, Isaac GR00T N1 is a 'cross-embodiment' model that can receive multimodal inputs such as language and images and perform operational tasks in diverse environments. A major advantage is that a trained model can be applied to humanoid robots of various shapes and characteristics, eliminating the need for extensive retraining for each robot, significantly reducing development costs and time.

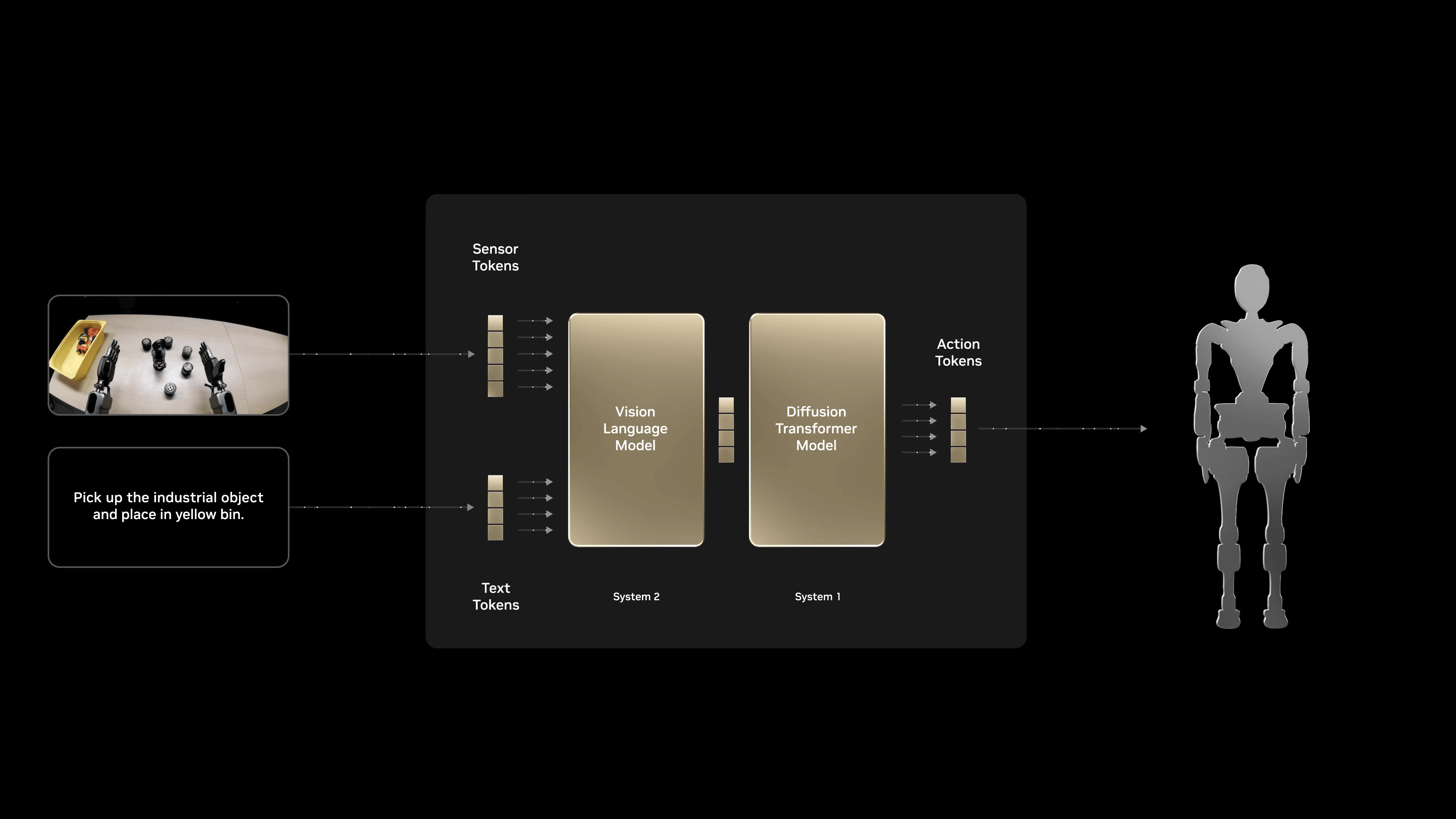
The Isaac GR00T N1 uses a dual-system architecture inspired by human cognition, with System 1 responsible for fast thinking such as reflexive actions and simple calculations, and System 2 responsible for slower thinking such as logical reasoning and careful decision-making.
System 1 is a visual language model based on NVIDIA's multimodal large-scale language model
You can see how the humanoid robot running on Isaac GR00T N1 works in the following movie. The robot on the left puts an object in a cup and hands it over to the person next to it, while the robot on the right takes the object out of the cup and stores it in a box separate from the cup.
Isaac GR00T N1 is developed by combining NVIDIA's SimReady data, simulation frameworks such as Isaac Sim and Isaac Lab , synthetic data blueprints, and pre-trained models. According to NVIDIA, 750,000 synthetic trajectories, equivalent to 6,500 hours (about 9 months) of human demonstration data, were generated in just 11 hours. By integrating this synthetic data with real data that incorporates human movements, it was said that a 40% performance improvement was achieved compared to using only real data.

The Isaac GR00T N1 2B model is publicly available and developers can access it through Hugging Face, with example datasets and PyTorch scripts also available on GitHub .
nvidia/GR00T-N1-2B · Hugging Face
https://huggingface.co/nvidia/GR00T-N1-2B
Related Posts: