NVIDIA and other research teams develop 'DrEureka,' a technology that accelerates robot training with large-scale language models

When teaching a robot new skills, it is common to first train it in a simulated environment and then deploy it in the real world, but the gap between the simulated and real environments becomes an issue. A research team from NVIDIA, the University of Pennsylvania, the University of Texas at Austin, and others has developed a technology called ' DrEureka ' that automates the task of bridging this gap using large-scale language models.
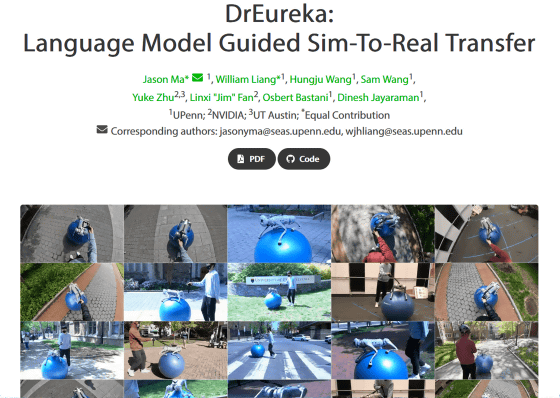
DrEureka | Language Model Guided Sim-To-Real Transfer
Nvidia's DrEureka outperforms humans in training robotics systems | VentureBeat
https://venturebeat.com/automation/nvidias-dreureka-outperforms-humans-in-training-robotics-systems/
In the approach of training a robot to learn skills in a simulated environment and then deploying it in a real environment, it is common to manually design and tune the 'reward function' that finds the correct action for the task and the physical parameters of the simulated environment. Because this process is time-consuming and labor-intensive, the research team decided to develop a technology to automate this task using large-scale language models.
The research team based their system on Eureka , an AI agent developed by NVIDIA Research. Eureka is an AI agent that autonomously creates reward algorithms for training robots, and can use large-scale language models to create optimal reward functions.
This time, the research team announced 'DrEureka (Domain Randomized Eureka),' which randomizes the physical parameters of Eureka's simulation environment, allowing robots to generalize learning in the simulation environment to unpredictable situations they encounter in the real world.
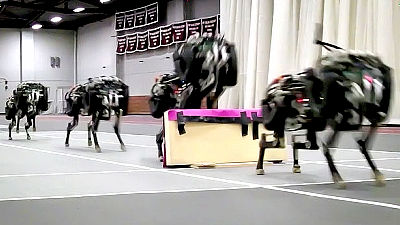
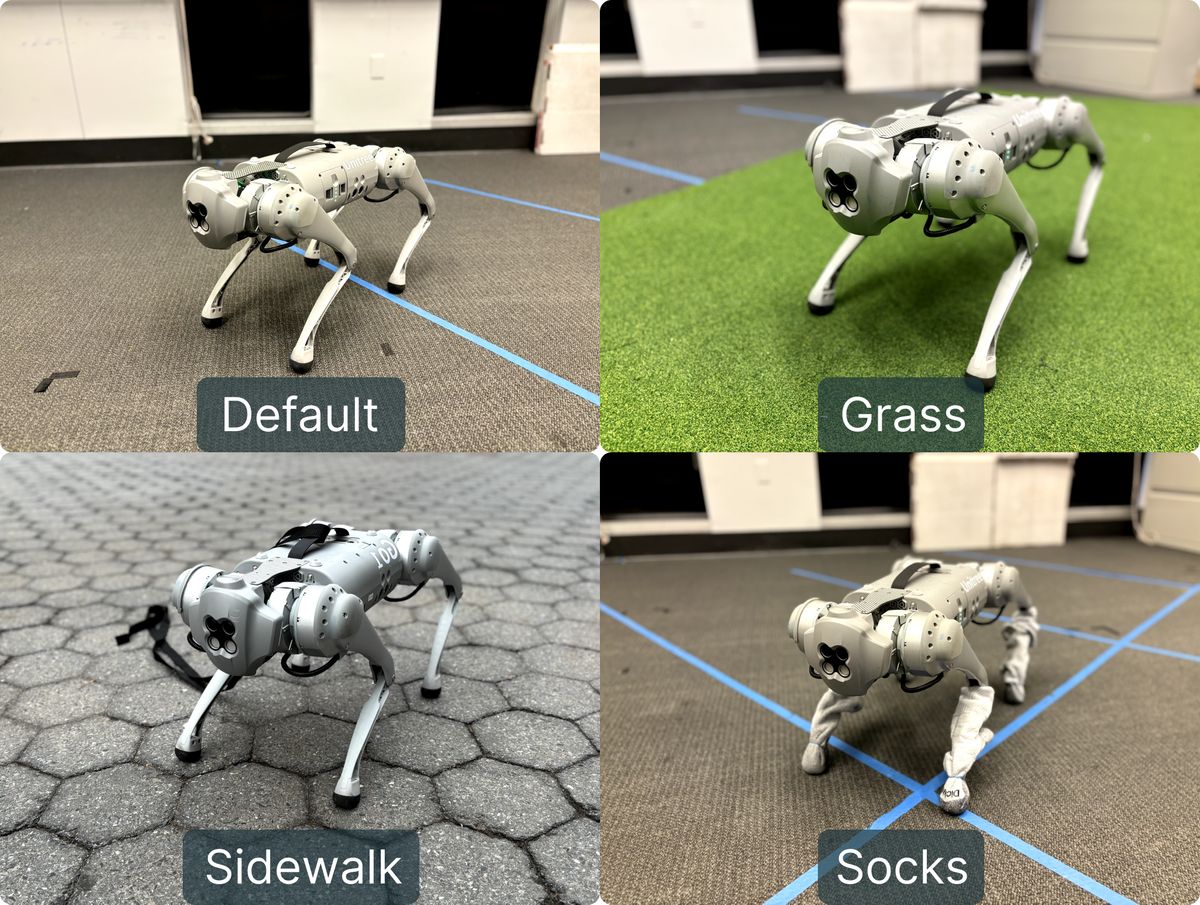
In an experiment where a robotic dog was trained to walk on four legs using DrEureka, it was found to be 34% faster forward and 20% faster on different terrains than a conventional system designed by humans. In addition, in a task where a robotic hand was required to rotate a Rubik's cube, the robotic hand trained by DrEureka was able to rotate the cube 300% more times than the human-designed training.
In addition, the research team also conducted an experiment in which a quadruped robot dog was trained to walk on a yoga ball while balancing using DrEureka. You can see in the video below how a robot dog trained by DrEureka actually walks on a yoga ball while balancing.
A robot dog appeared from the left edge of the screen, wiggling and swaying on a yoga ball.

The human holds the reins of the robot dog, and the robot dog moves in sync with the human's movements while riding on the yoga ball.

You can continue to balance on the yoga ball without falling off even when the terrain changes.

In the video below, you can see a robotic dog trained by DrEureka deftly balancing on a yoga ball that gradually deflates as air deflates.
DrEureka Balancing on a Deflating Ball - YouTube
The DrEureka code is open source and available on GitHub.
GitHub - eureka-research/DrEureka
https://github.com/eureka-research/DrEureka
Related Posts: