'π0' is a general-purpose robot base model that can take clothes out of the washing machine, fold them, and clear the table after meals.

While AI can sometimes show talents that surpass humans in difficult tasks, such as beating humans at chess or creating new drugs, it can also struggle with tasks that humans can easily perform. This is known as the ' Moravek's Paradox ' by mechanical engineering researcher Hans Moravec, but we must also work on solving physical problems. Physical Intelligence , a group that develops foundational models and learning algorithms, spent eight months developing a general-purpose robot foundation model 'π0' as an AI model for robots that realize general-purpose movements.
Our First Generalist Policy
https://www.physicalintelligence.company/blog/pi0
According to Physical Intelligence, 'π0' is the first step in the long-term goal of developing 'Artificial Physical Intelligence', which allows robots to solve any task, just as you would with a large-scale language model (LLM) or a chatbot assistant.
Because π0 has learned from a wide variety of data, it can execute a wide variety of instructions. Unlike LLM, it is trained not only on images and text, but also on concrete robotic experiences, learning to output direct motor commands through a new architecture, acquiring 'physical intelligence.'
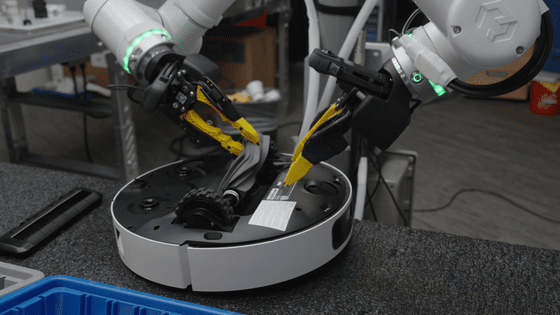
Demonstration footage shows π0 performing tasks such as unloading laundry from the washing machine and folding it, clearing the table after a meal, and assembling a box.
A robotic arm opens the lid of a drum-type washing machine and removes laundry.
Folding the laundry after taking it out of the washing machine
Clearing away the dishes left behind after a meal
Coffee beans are measured and transferred to the mill
How to assemble the box
The first prototype model was trained on an open-source dataset and a dataset of dexterity tasks collected from eight different robots. The reason for using a broad, rather than specialized, dataset as the training source is to allow the base model to learn general knowledge of physical interactions rather than solving specific applications, which Physical Intelligence describes as 'the first foundation for physical intelligence.'
To successfully build the model, Physical Intelligence believes it is necessary to involve the entire robotics community in a collaborative effort, and has already begun collaborating with many companies and research institutes.
Related Posts: