Detailed instructions for actually assembling the open source quadruped robot 'Stanford Pupper' that can freely turn and jump are released
A research team at Stanford University has published the parts and software necessary for the production of the small quadruped robot ' Stanford Pupper ' and explained in detail how to make it.
Pupper — Stanford Student Robotics
Stanford Pupper-Google Docs
https://docs.google.com/document/d/1Ofrtlmh0dQoEvRji5PUVH9bgwHnR-8KkTXR1eMLzXh0/
You can immediately understand what kind of robot Stanford Pupper is by watching the following movie.
Stanford Pupper-YouTube
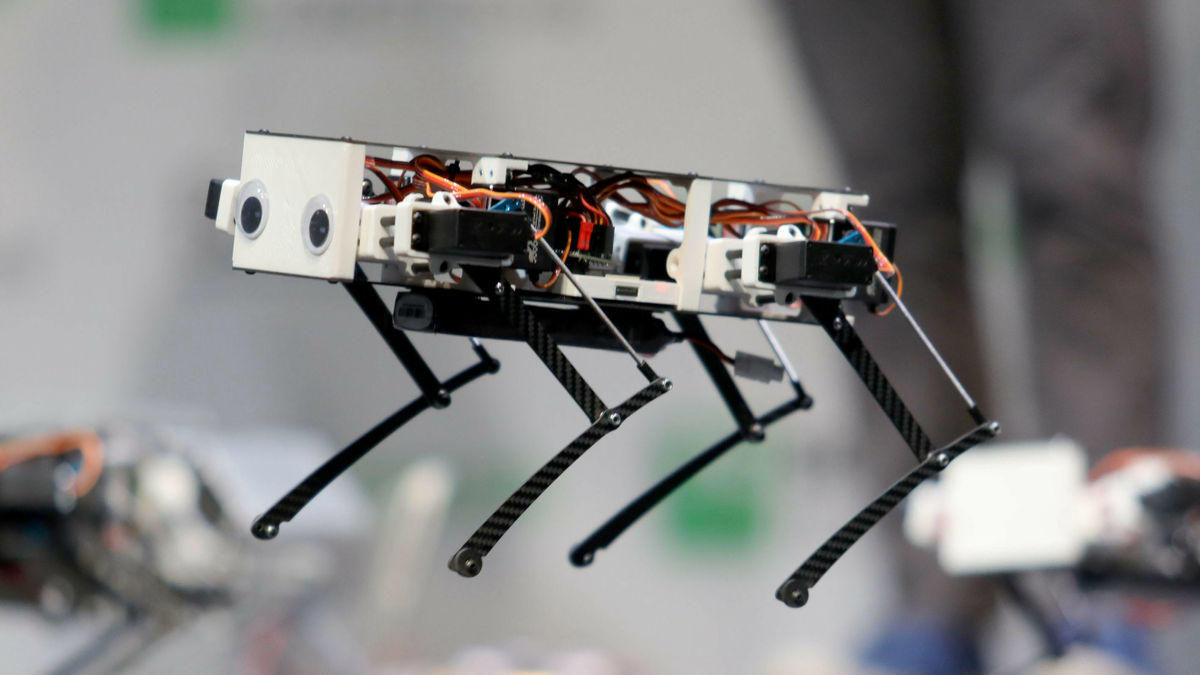
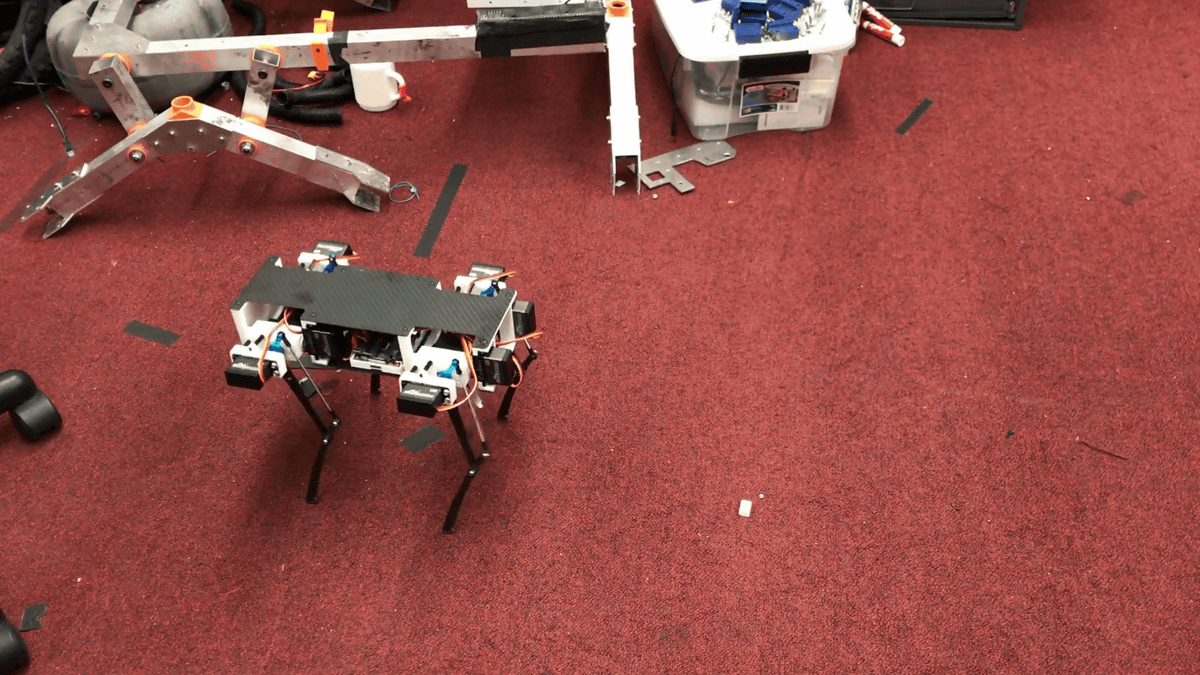
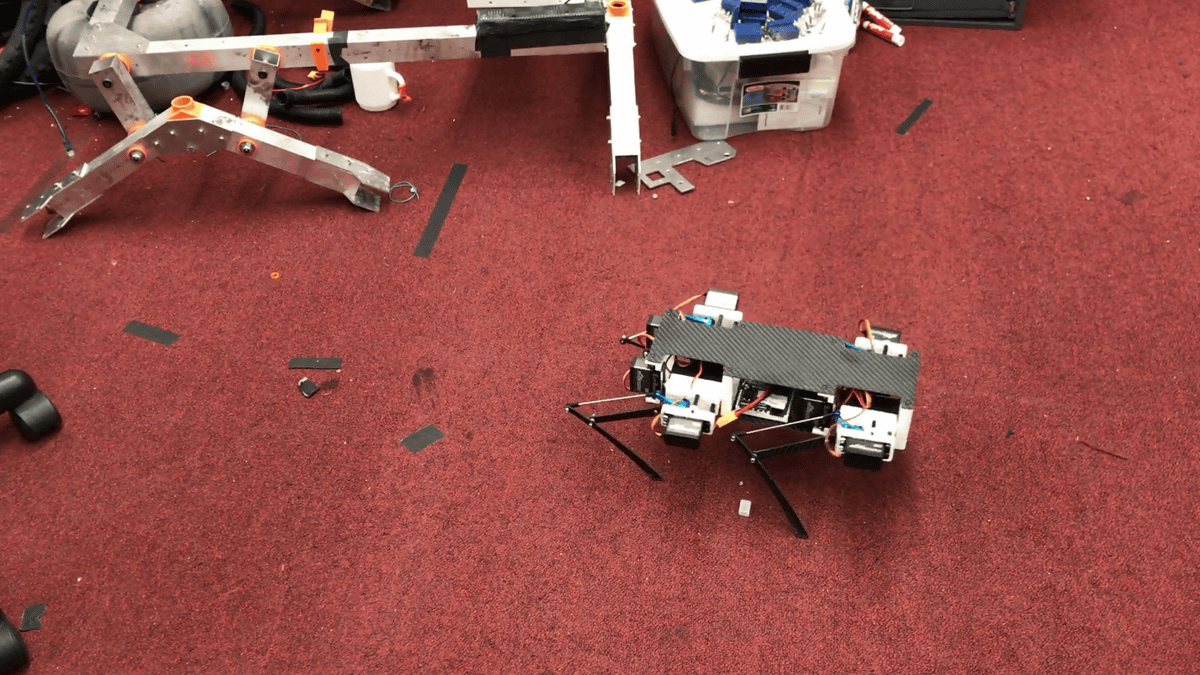
Stanford Pupper is a quadruped robot like a dog without a neck. Moving in an arc ...
Back running.
You can move the legs dexterously and turn on the spot.
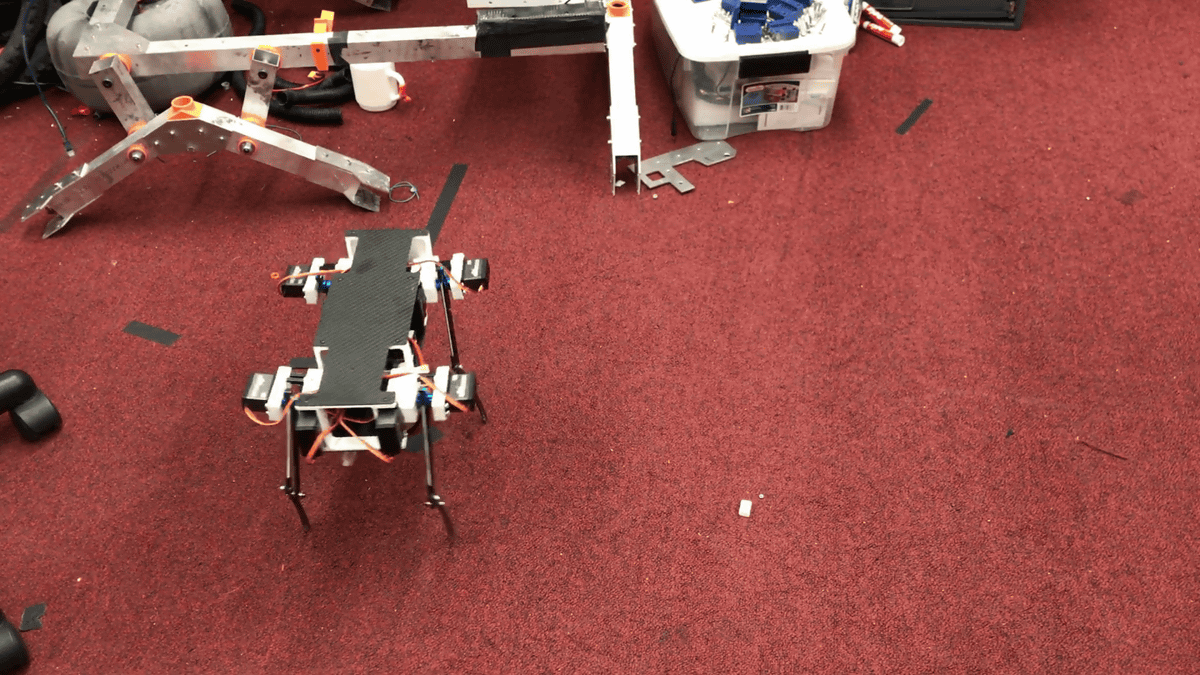
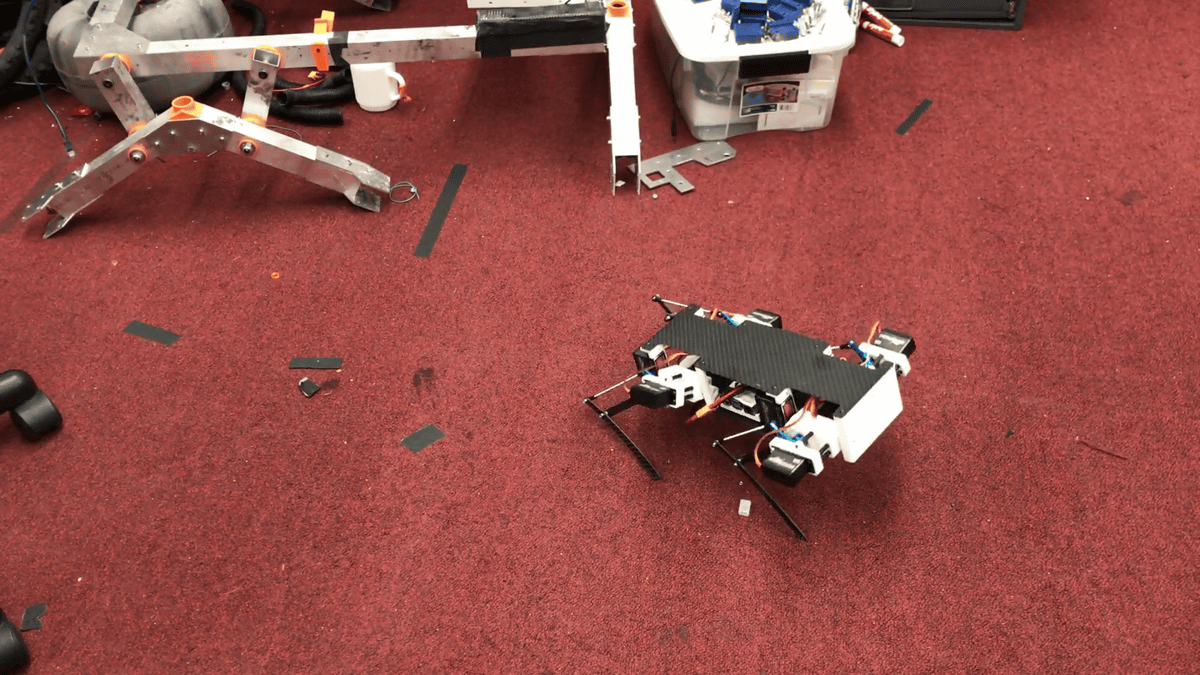
After bending the legs and lying down ...

You can also jump.
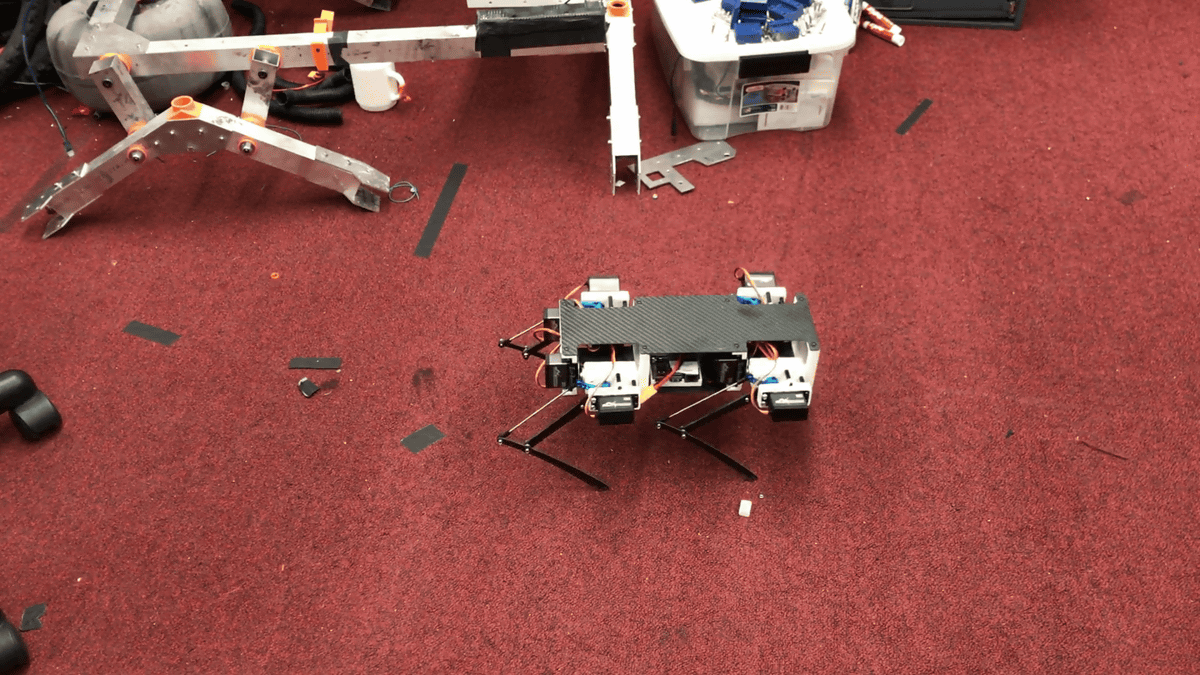
It is also possible to bend only a specific leg and twist the body diagonally.
Stanford Pupper is a robot that is supposed to be made by yourself. The total amount of assembly parts is about 600 dollars (about 64,000 yen) to 900 dollars (about 96,000 yen), and I already have the base Raspberry Pi and the PlayStation 4 dedicated controller DUALSHOCK 4 etc. necessary for operation If so, the cost required will be reduced accordingly. The production time varies depending on whether you have specialized knowledge or not, and it takes about 4-10 hours. The production difficulty is 'the level to make a small quadcopter drone'.
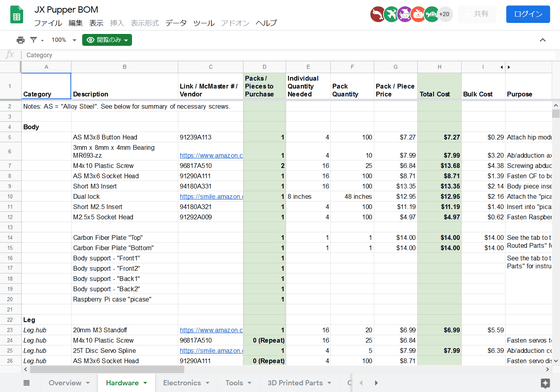
The parts needed to build the Stanford Pupper are detailed in the spreadsheet below. 'Category' describes 'Which part is necessary for the body' such as the body, and 'Description' shows the product name of the part, and 'Link / McMaster # / Vendor' shows the relevant part. There are links to mail order sites where you can purchase parts and model numbers.
JX Pupper BOM-Google Spreadsheet
https://docs.google.com/spreadsheets/d/1zZ2e00XdzA7zwb35Ly_HdzfDJcsxMIR_5vjwnf-KW70/edit#gid=1141991382
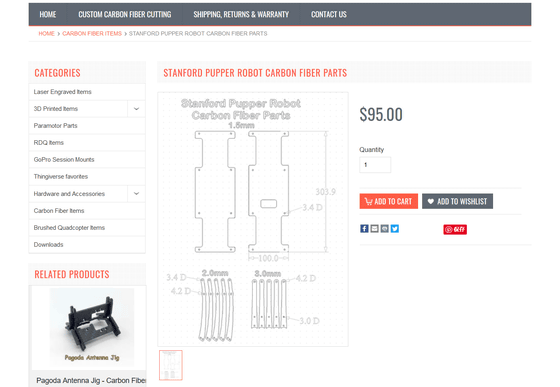
Parts not listed in the 'Link / McMaster # / Vendor' section are parts that are not for general sale. You need to print with a 3D printer or purchase from the following, and it costs $ 95 (about 10,000 yen).
Stanford Pupper Robot Carbon Fiber Parts-Plastic-Spider
https://great3d.com/stanford-pupper-robot-carbon-fiber-parts/
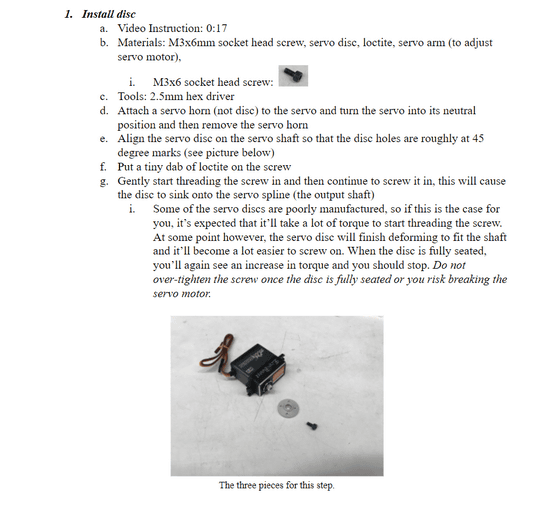
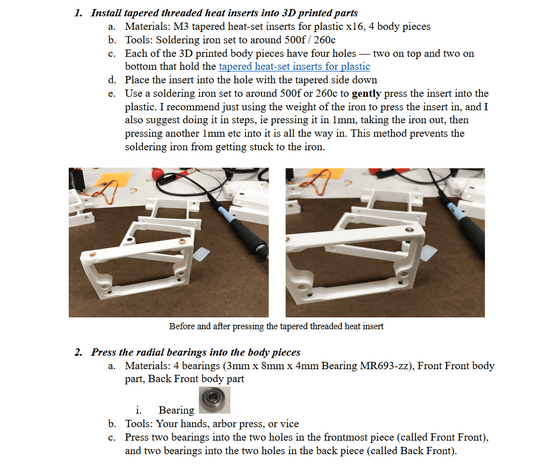
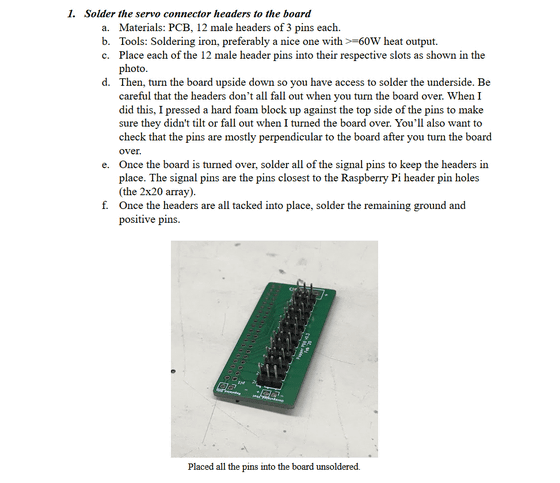
The assembly manual is divided into three parts, 'Hip (leg)', 'Body' and 'PCB' (distribution board), and each is explained in detail.
Hip Assembly-Google Docs
https://docs.google.com/document/d/1q-gAl5f5Jf3FpqBS3S7KLYmJK8pqScrbSuiDyUNBz_Q/
Pupper Body Assembly-Google Docs
https://docs.google.com/document/d/17fdzvwpjtqxSz1pGHZ9alKclC0lZnAiOoYe-dWSYFus/
Stanford Pupper PCB Assembly-Google Docs
https://docs.google.com/document/d/1dHCywVy-AITTzERyaq0_-DolPpvKBlEALdpsy_sTffg/
A movie that demonstrates assembly is also available on YouTube, so you can visually learn how to assemble.
Stanford Pupper Hip Assembly-YouTube
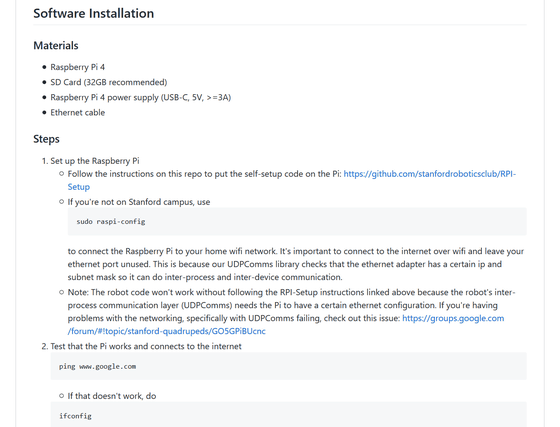
The source code and installation method are explained in detail on GitHub.
GitHub-stanfordroboticsclub / StanfordQuadruped
https://github.com/stanfordroboticsclub/StanfordQuadruped
Related Posts: