A drone capable of high speed flight while avoiding obstacles fully automatically

Drone which anyone can easily skip has come out in various kinds in the past few years, but now MIT is drone who automatically fly around the obstacles and fly at 30 miles per hour (about 48 km) It is made.
Self-flying drone dips, darts and dives through trees at 30 mph | MIT CSAIL
http://www.csail.mit.edu/drone_flies_through_forest_at_30_mph
The video on how drones fly is released on YouTube.
Drone Autonomously Avoiding Obstacles at 30 MPH - YouTube
A drone flies from the launch pad on the ground.

MIT 's drone is shaped like a widely spreading wing in the side, it is a bit different from the drones with multiple rotors, which is commonly known. The wing width is 34 inches (about 86 cm), the weight is over 1 pound (about 453 g), and it costs over $ 1,700 (about 210,000 yen) as production cost.

The drone flying in front of the autonomous flight

From behind, the drones that human beings are chasing follow.

The picture was taken by the drone who is tracking from behind

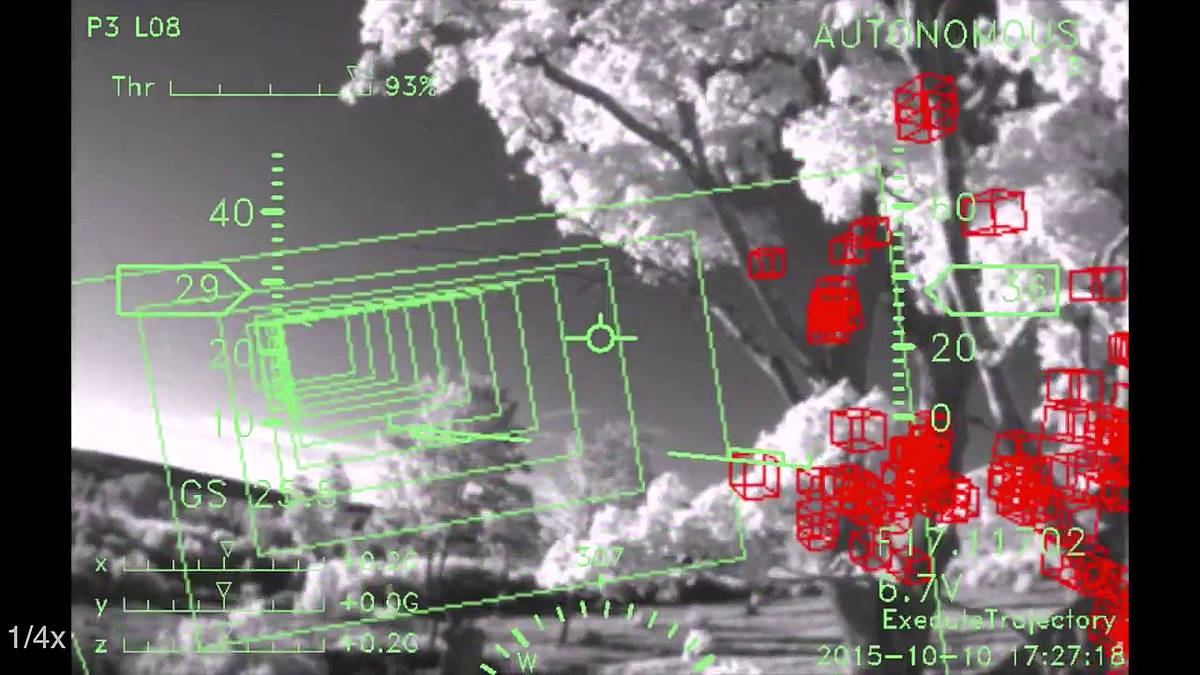
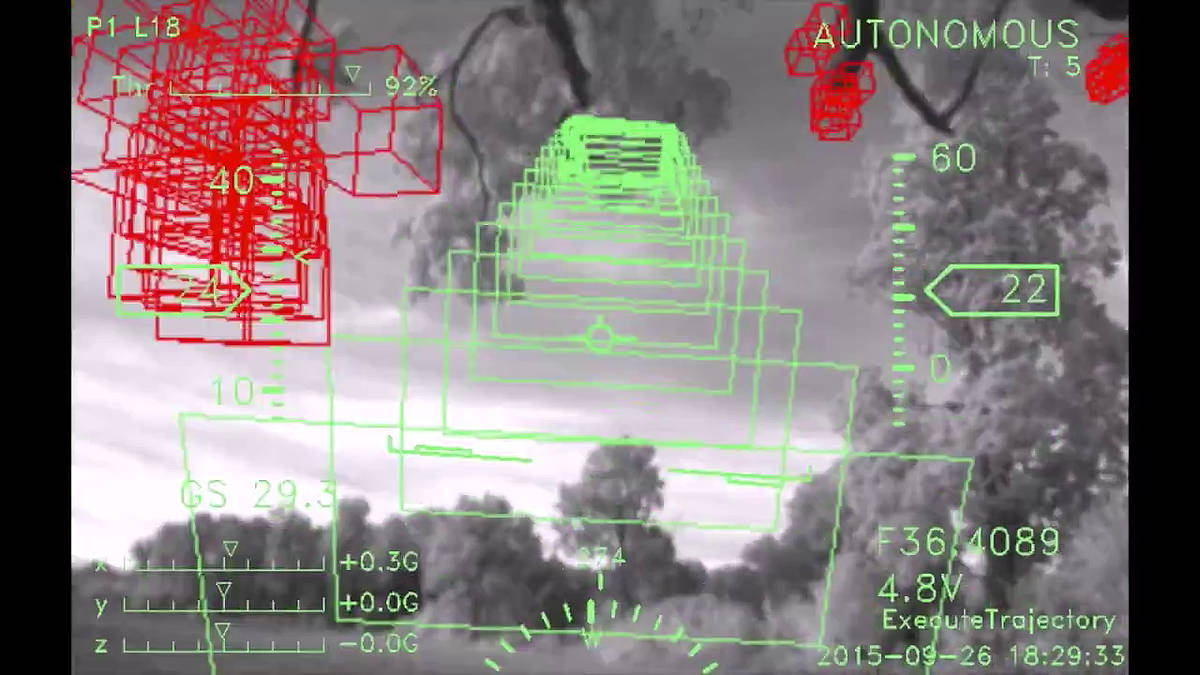
The drone in autonomous flight seems to be like this.

What is displayed in red is the obstacle to avoid
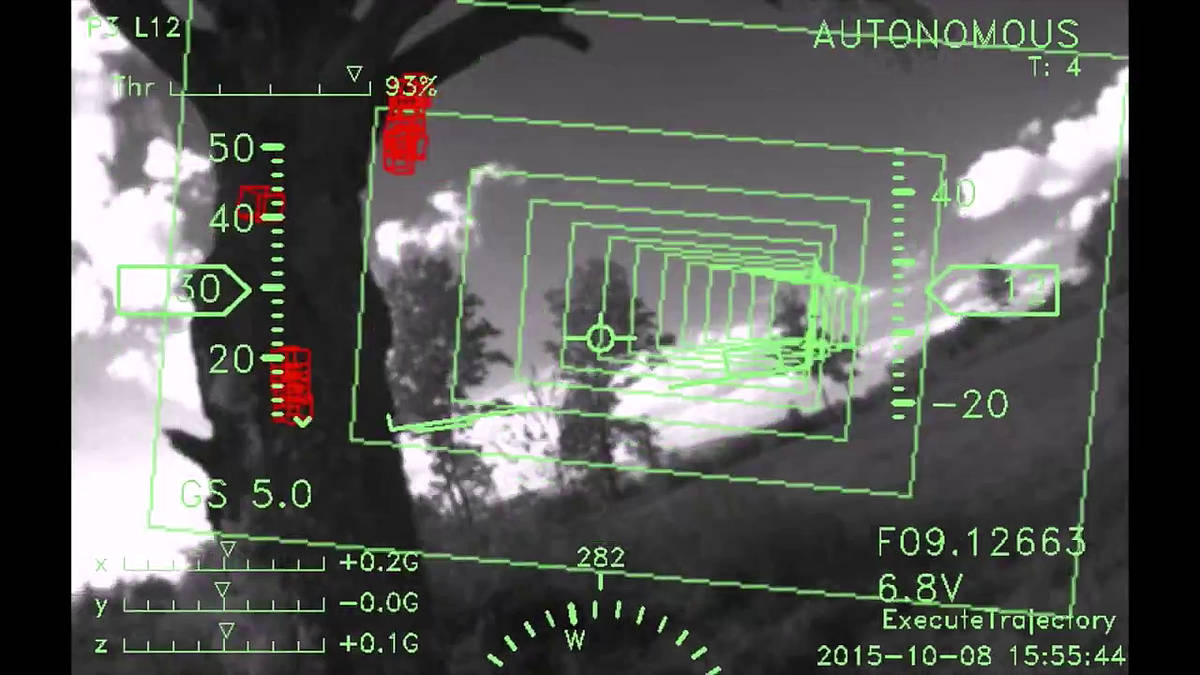
Avoid obstacles without compromising speed. The sensor confirms the safety of 10 m ahead. This is because it is enough for mapping the entire environment if the field of view is 10 meters.

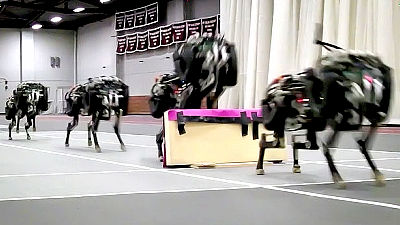
Experiments of repeating the drone many times over and over are repeated.

Although the drones are purposely blown towards the direction of the tree, I judge the trunk and branches firmly and avoid it and continue flying.
There are two cameras in the drone ......
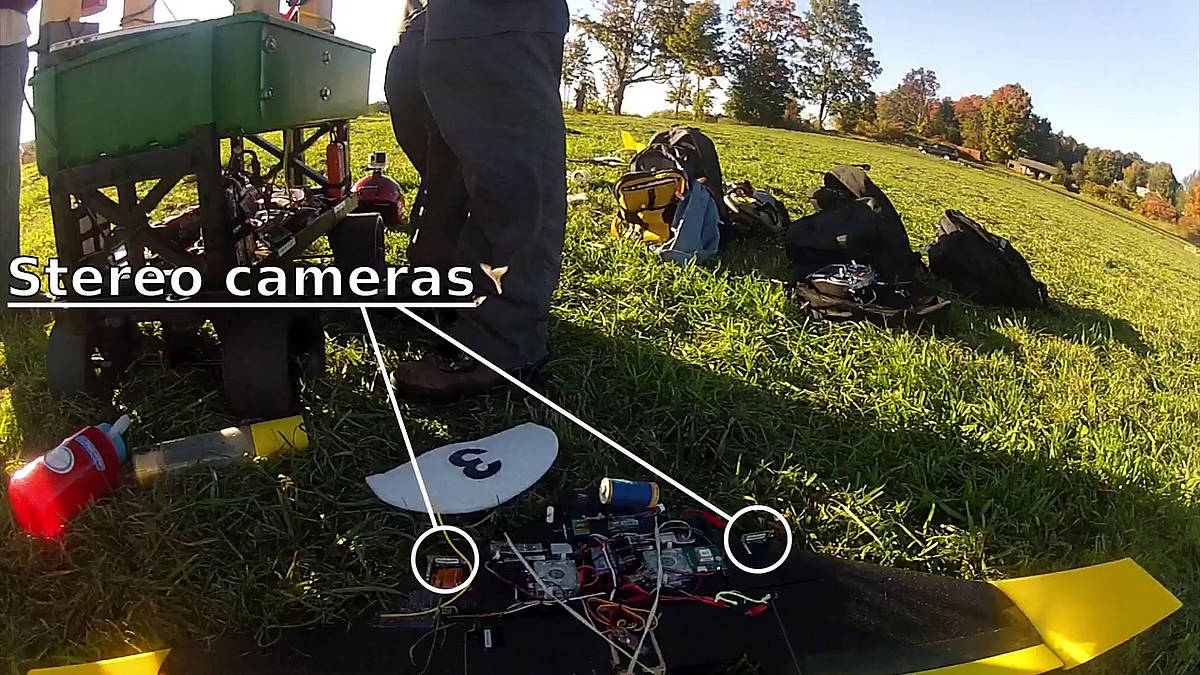
Two quad-core CPUs are installed.
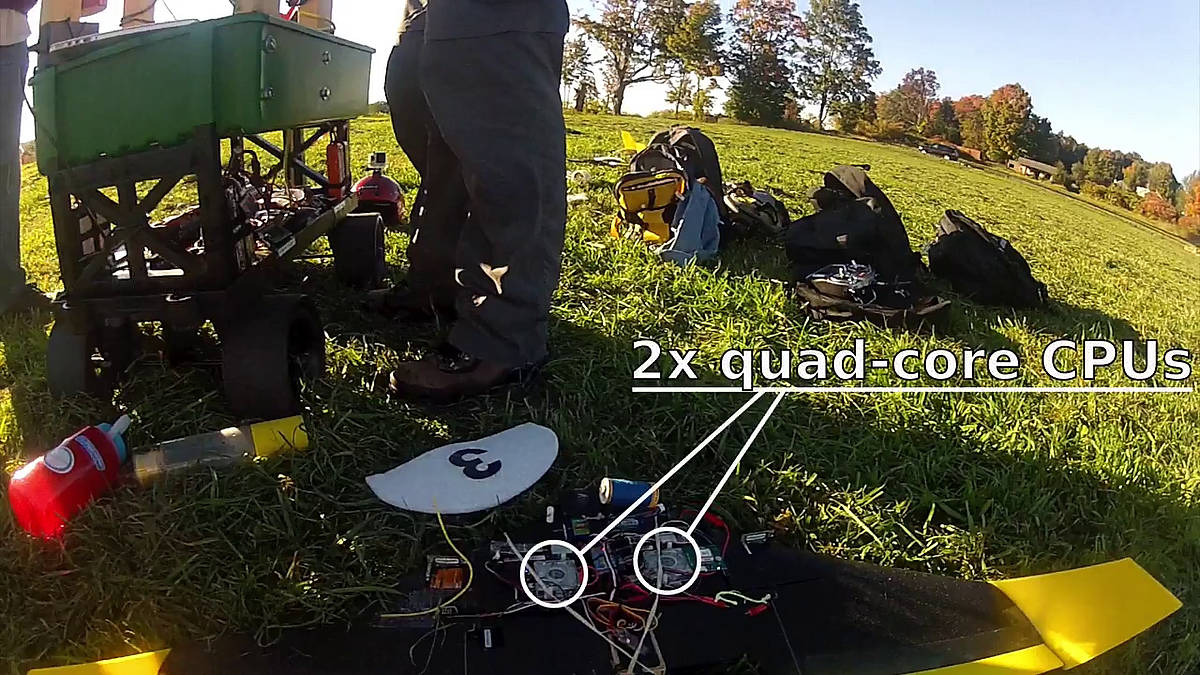
We detect the presence of obstacles by our own power and calculate how to avoid them.

It is said that it is becoming possible to perform more complicated calculation by the evolution of hardware, and it seems that we plan to improve the algorithm so that even if the number of obstacles further increases it can fly without problems.
In addition to the official page, progress of this project can be confirmed in GitHub.
Andybarry / flight · GitHub
https://github.com/andybarry/flight
Related Posts: