The cheater type robot of MIT development can completely run autonomously and can jump over obstacles
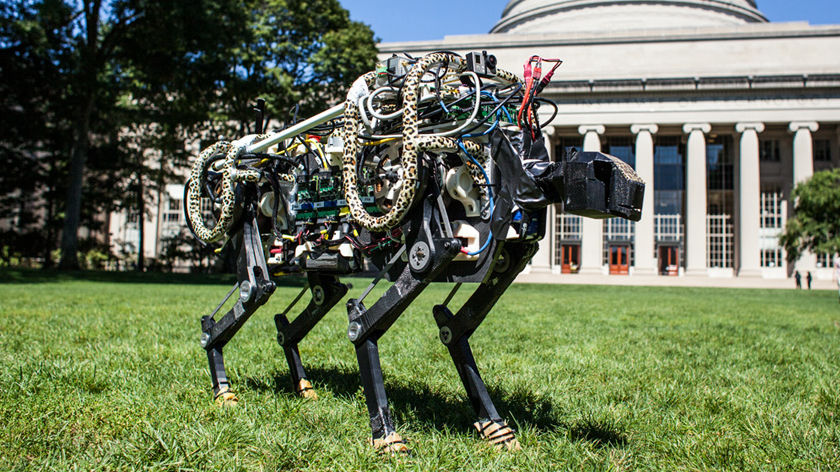
MIT'sBiomimetic Robotics LaboratoriesSo, from 2009 cheetah type robot "CheetahThe development of "is progressing. Cheetah has been demonstrating how to run in the laboratory at 22 km / h while it is fixed using wires and arms, but by installing the latest algorithm, it is finally possible to run autonomously without any support at all became.
Bound for robotic glory | MIT News Office
http://newsoffice.mit.edu/2014/mit-cheetah-robot-runs-jumps-0915
If you look at the movie published by the Biomimetic Robotics Laboratory, you can see how "Cheetah" evolved.
At first it seems that it started from the point of jumping to the vertical.
MIT cheetah Vertical Jump - YouTube
Then I can walk slowly ... ....
MIT cheetah robot walking 1.5 m / s (specific resistance = 1) - YouTube
In 2012, it has succeeded in self-running for the first time with 4 legs, and its motion is very smooth as you can see with a single shot when you watch a movie. However, it is also clear that the main body is fixed by wires, arms, etc. so that Cheetah will not fall down, you can also realize how difficult it is to move with no support.
MIT Cheetah's first run - YouTube
In addition, it was possible to run at 22 km / h in 2013.
MIT Cheetah runs at 22 km / h, Gait transition from trot to gallop - YouTube
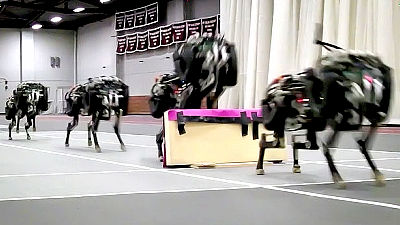
MIT's Cheetah can now operate smoothly with 4 legs according to the latest algorithm. In the trial run in MIT's sports grounds, you can see that Cheetah is completely self-reliant running without using any supporting equipment. Also, inside the movie, you can also see a 33-centimeter obstacle jump at the indoor laboratory and get over it.
MIT Robotic Cheetah - YouTube
Researchers at MIT estimate that Cheetah's maximum speed may reach up to 30 mph (approximately 48 km per hour) by a new algorithm. This is because a new algorithm has been devised so that each leg of Cheetah can firmly apply force when landing on the ground.
Generally, in order to run faster, it is necessary to increase the propulsion power of the robot. However, Sangbae Kim, assistant professor at Mechanical Engineering at MIT, noticed that the force control approach in the first-class Sprinter driving method is very similar to Cheetah's driving method and incorporates it into Cheetah's algorithm I heard he tried it. Kim said, "Many Sprinters, including Usain Bolt, do not have a very fast turning foot.The first-class Sprinters run as long as you slide your feet and kick the ground more powerfully," Thing.
Most robots are slow in operation and heavy weight, so it is said that the control when moving at high speed is not good. However, Cheetah has also succeeded in jumping over obstacles while running, and Kim says, "This is a special part of Cheetah when compared to other robots."
Cheetah is excellent in various behaviors so far because of the high torque density electric motor developed by Mr. Jeffrey Lang, professor of electrical engineering at MIT. In addition, Cheetah's foot parts where the motors convey movement, MIT'sResearch Laboratory of ElectronicsIt is developed by Mr. David Otten who is the chief director at the company. These special motors and leg parts seem to no longer need to use delicate equipment such as force sensors for force control.
In addition, CheetahIce Bucket ChallengeWe are also doing the help of, we are amazing at its versatility.
MIT Cheetah robot helps with the Ice Bucket Challenge, by Sangbae Kim - YouTube
Related Posts: