MIT's quadruped walking robot 'Cheetah 3' succeeded in climbing the stairs with a sense of legs without using a camera

The latest movie of the quadruped walking robot " Cheetah (Cheetah) " being developed at MIT Biomimetics Robotics Lab has been released. The slimmed 3rd Generation "Cheetah 3" does not rely on image recognition by the camera, but shows off a movement and a big jump accompanied by outstanding stability just by feeling with feet.
"Blind" Cheetah 3 robot can climb stairs littered with obstacles | MIT News
http://news.mit.edu/2018/blind-cheetah-robot-climb-stairs-obstacles-disaster-zones-0705
The movement of Cheetah 3 which shows outstanding stability performance without a camera can be confirmed in the following movie.
Vision-free MIT Cheetah - YouTube
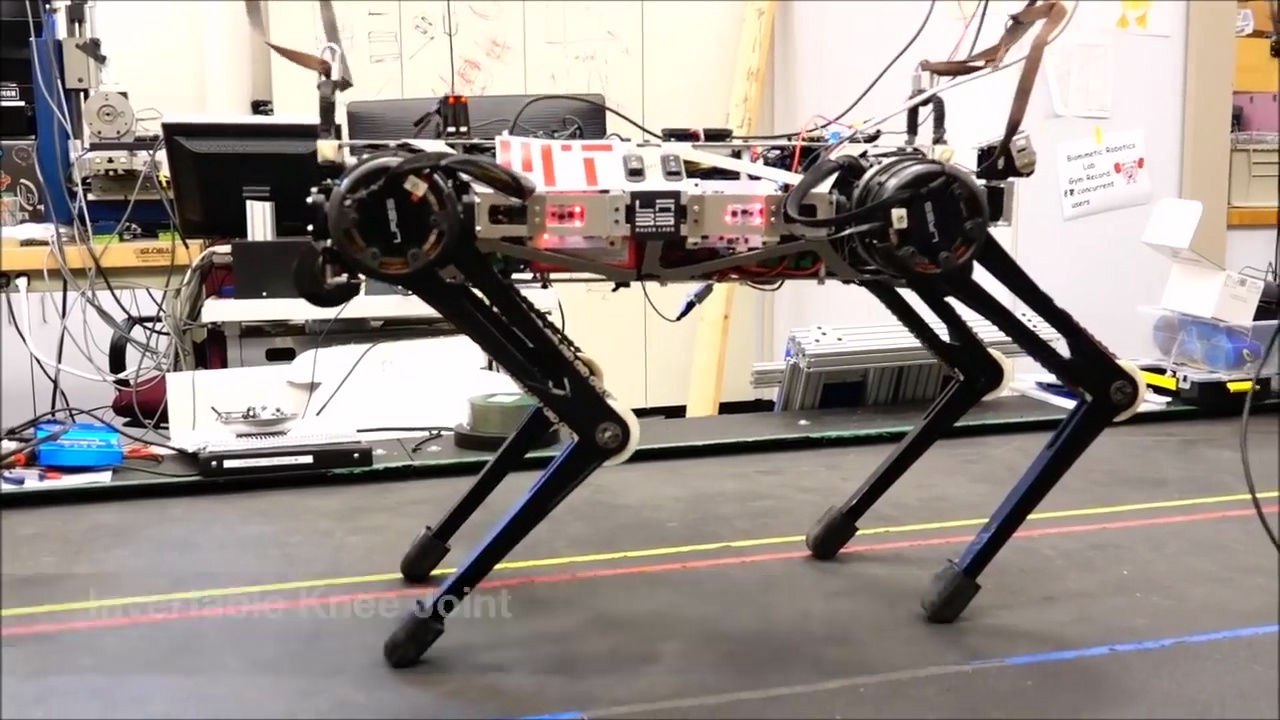
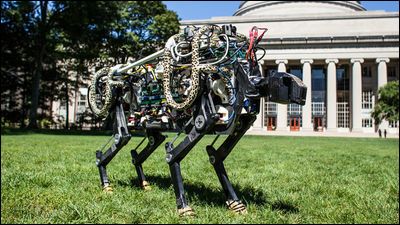
This is the third generation "MIT Cheetah". It is a quadruped walking robot separate from the cheetah developed by Boston · Dynamics. The shape of Cheetah 3 which was considerably slimmed is almost the same as the " SpotMini " of Boston Dynamics.
Using the joints of four legs, you can twist your body to a large extent.
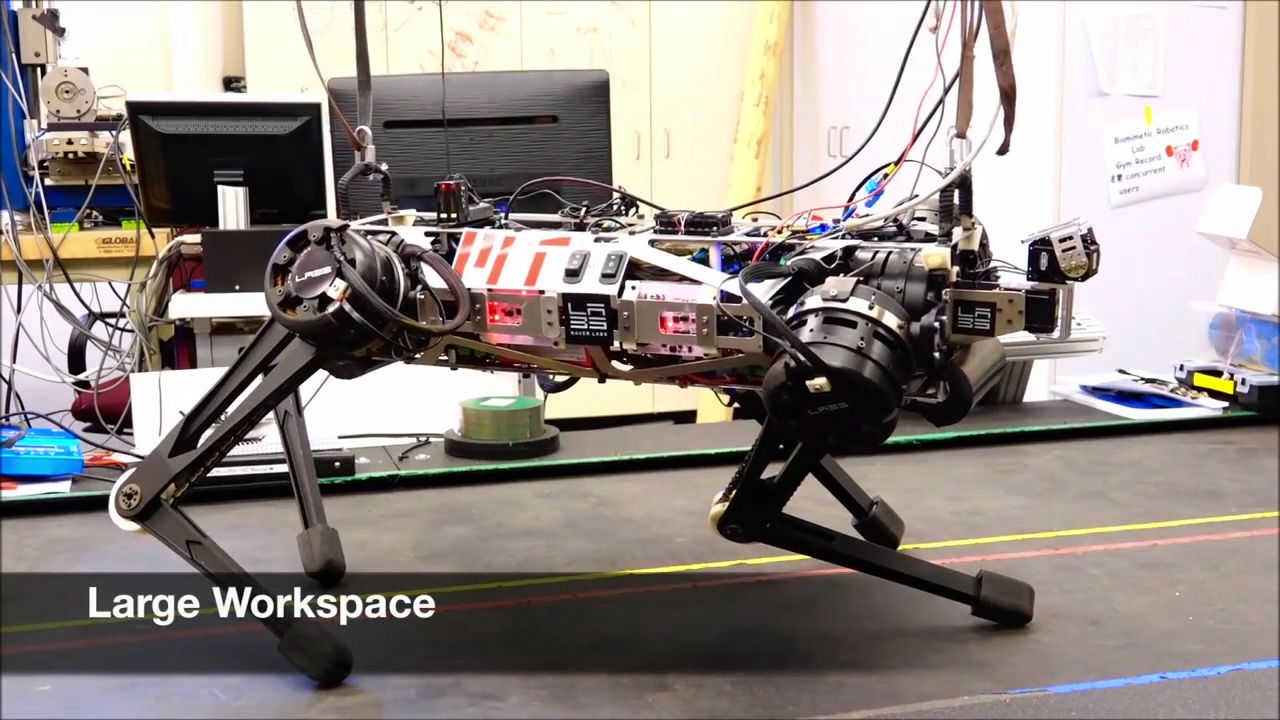
Stretch the forefoot on the right side of the screen ......
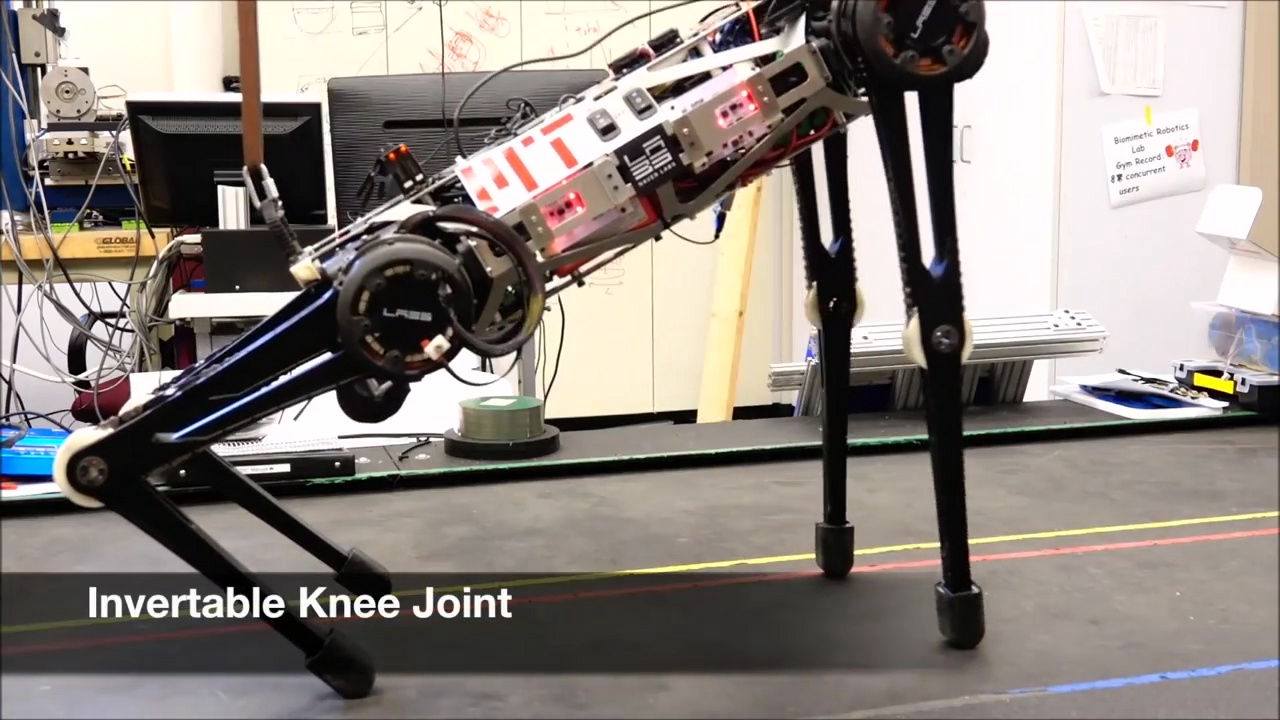
When the joint is folded in the opposite direction ......
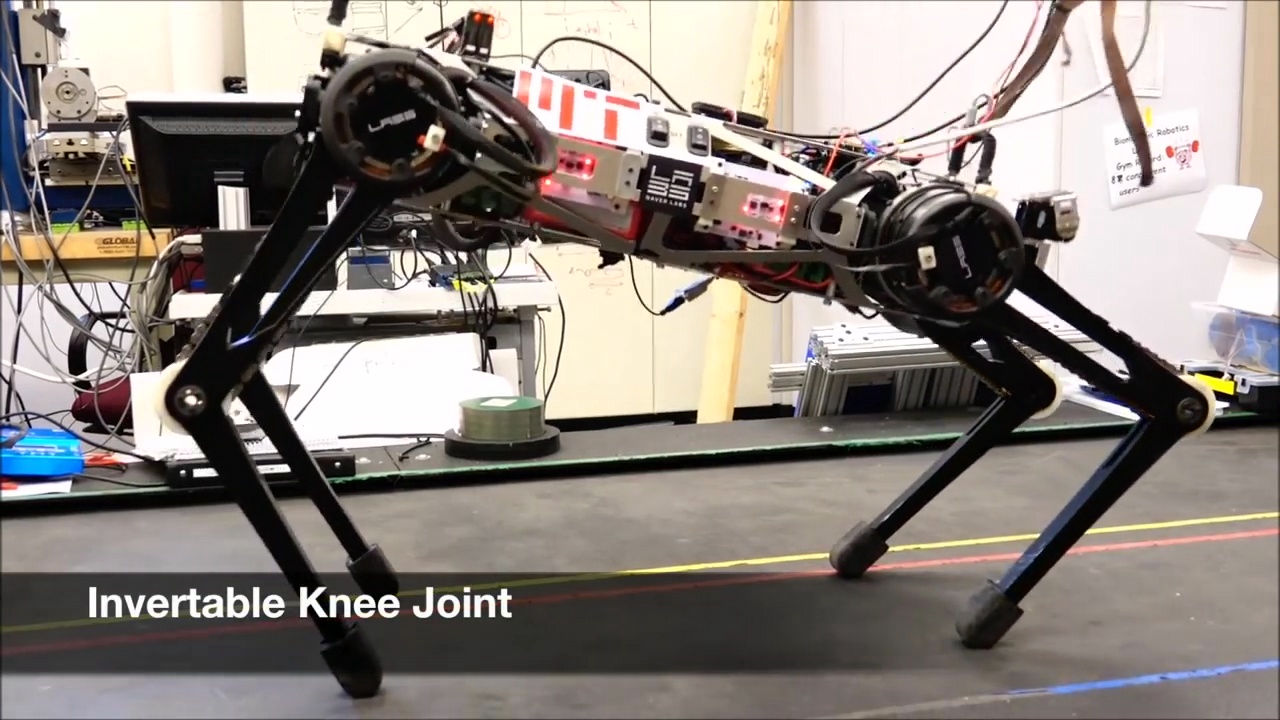
It is also possible to change the direction of front and back.
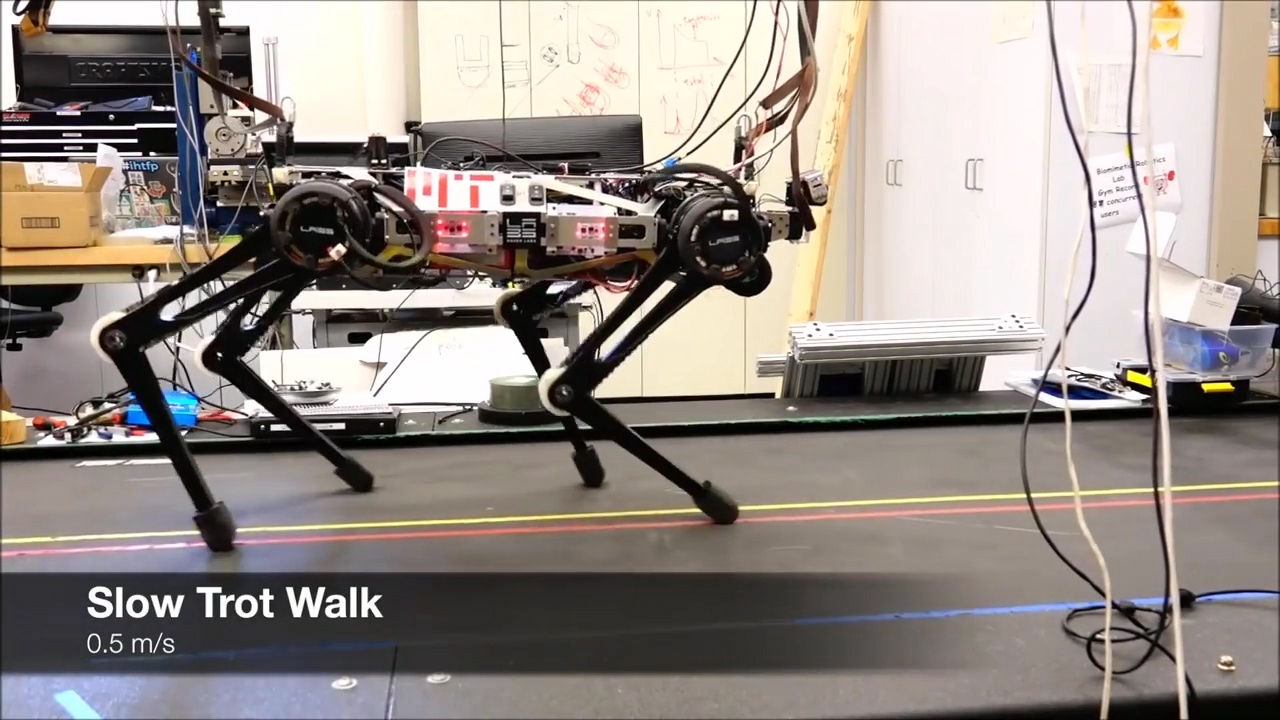
Relaxed walking at 0.5 m / s (1.8 km / h) ......
Not only for running at 1.7 m / s (6.1 kilometers per hour) ......

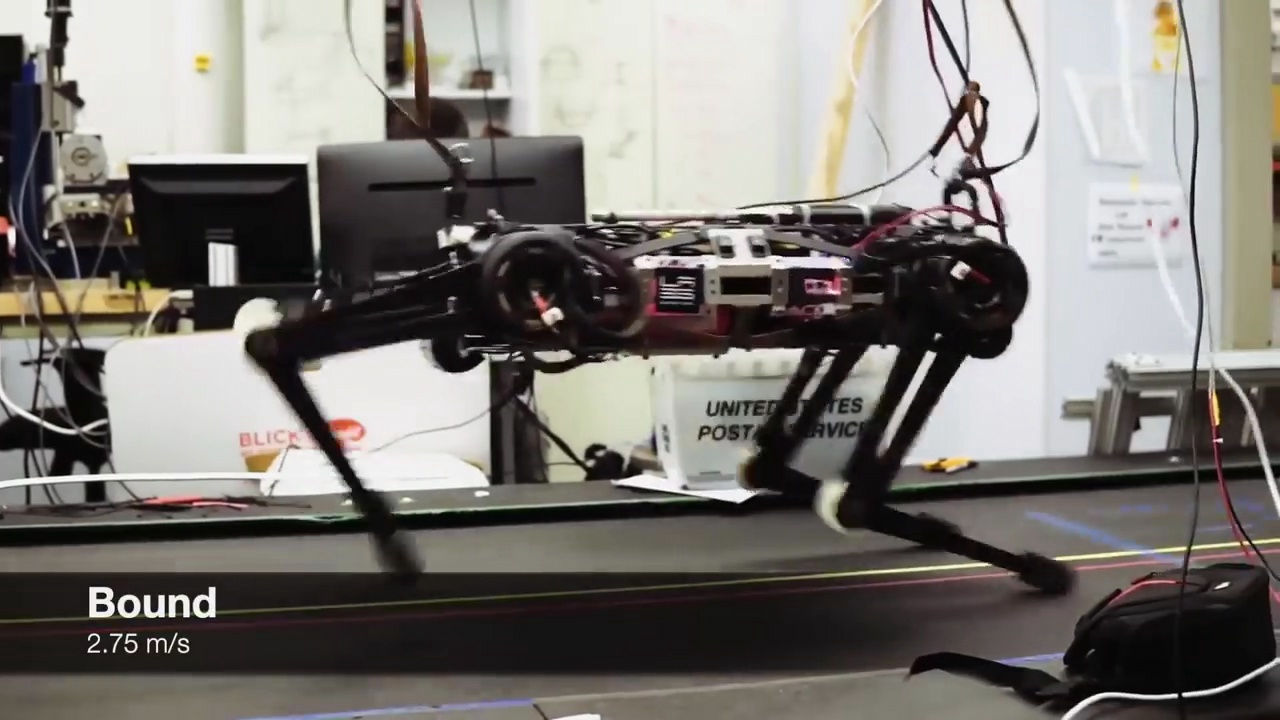
Running at 2.75 m / s (9.9 km / h) ......
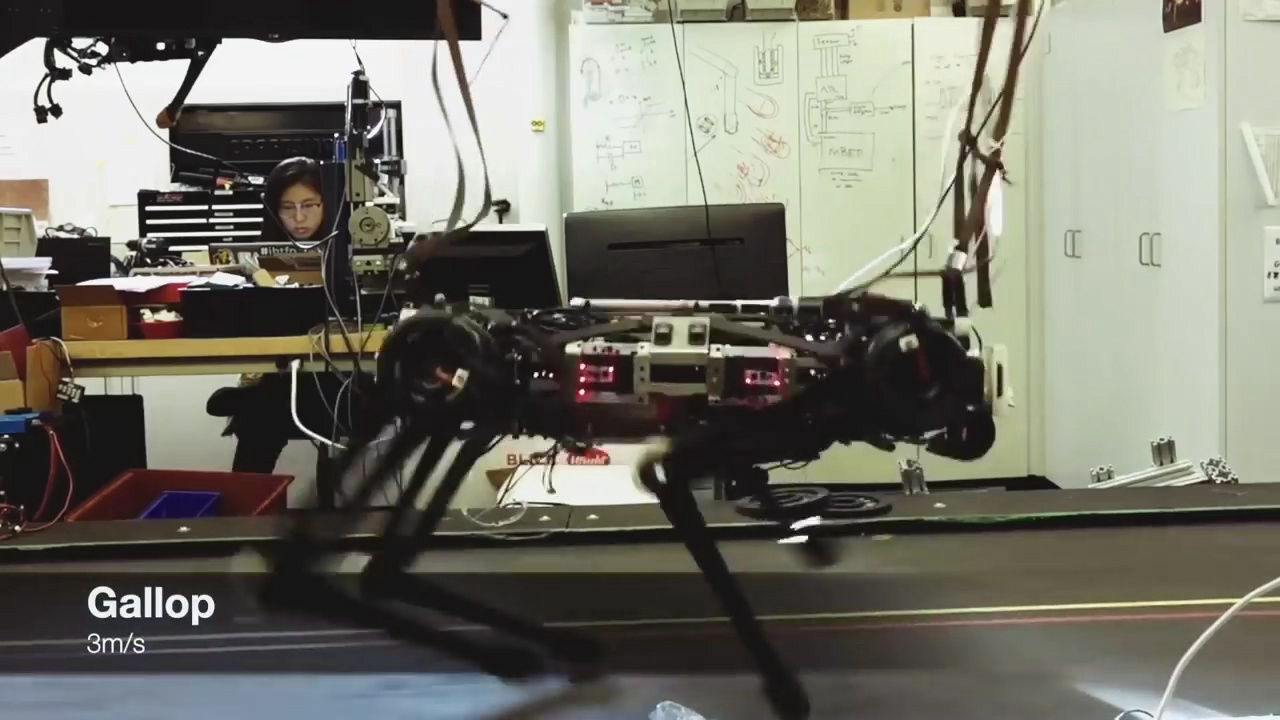
You can run at 3 m / s (10.8 kilometers per hour).
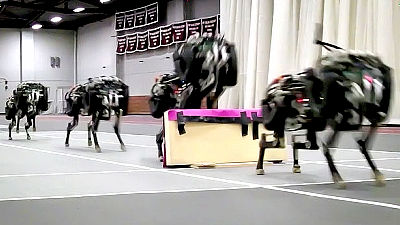
It is also possible to jump on the spot called "Pronk".
You can change direction while jumping with Pyeongyeong.

"Spin Move" which twists and turns slowly while turning also OK.
Leave the lab and walk outside Cheetah.
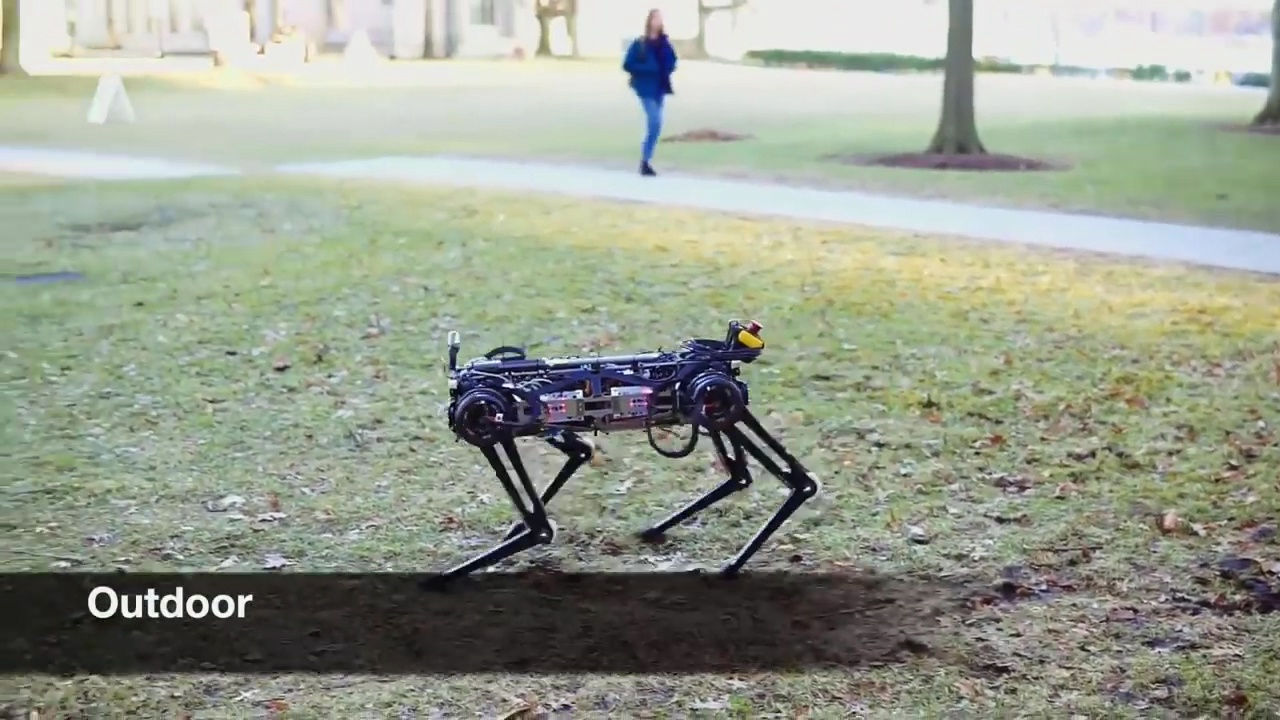
Not only on the lawn, but also on the scaffolding's unstable gravel roads.

In addition, it is possible to walk three legs without using one leg. In the unlikely event, it seems to be able to cope with situations where legs can not be used due to breakdown or accident.

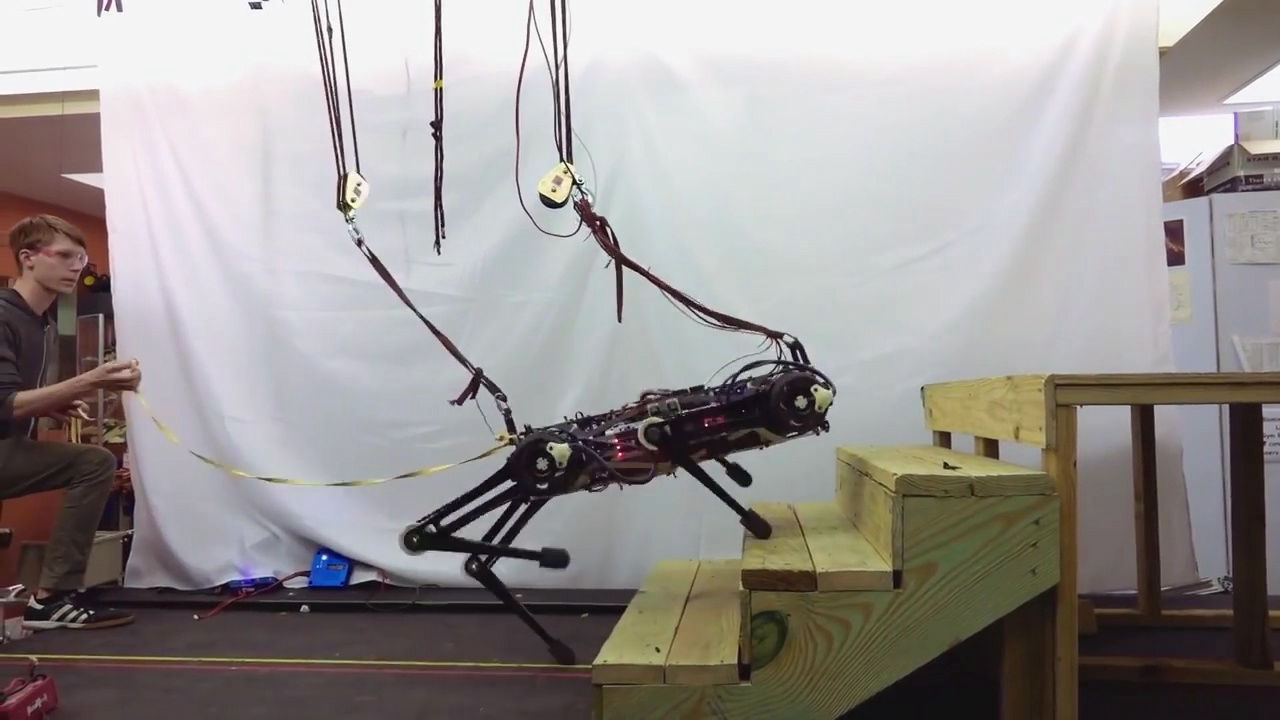
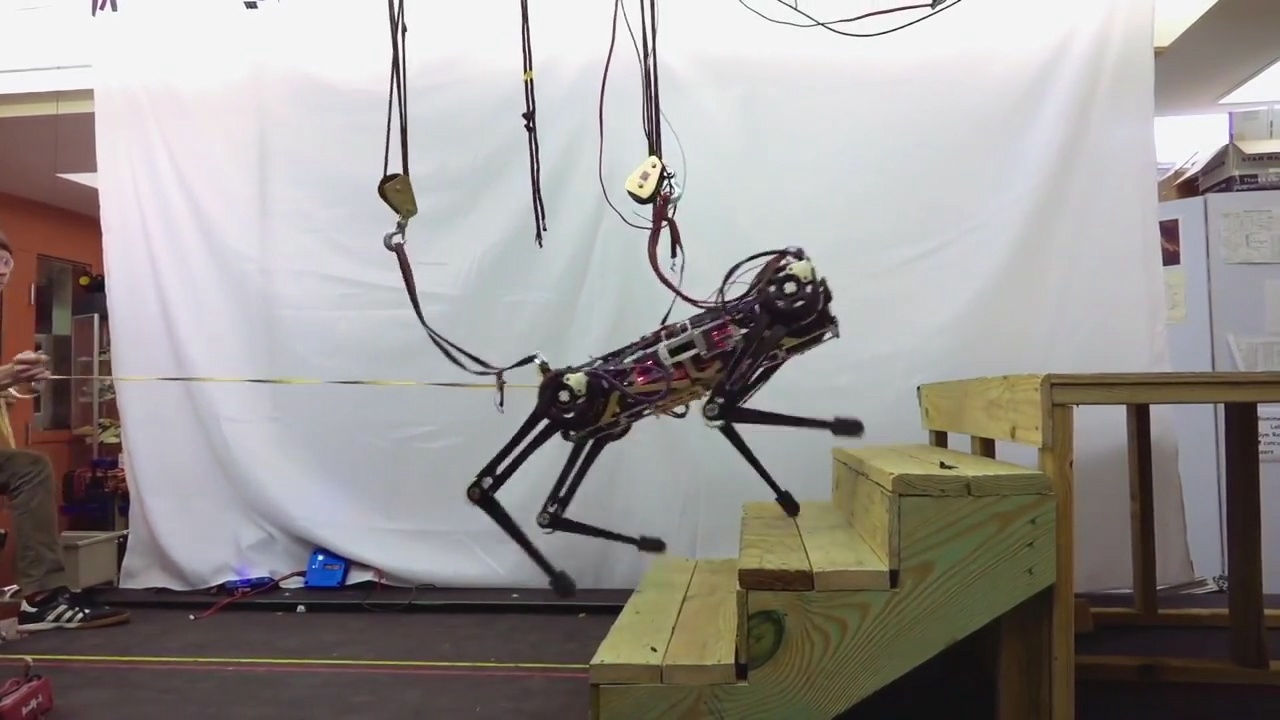
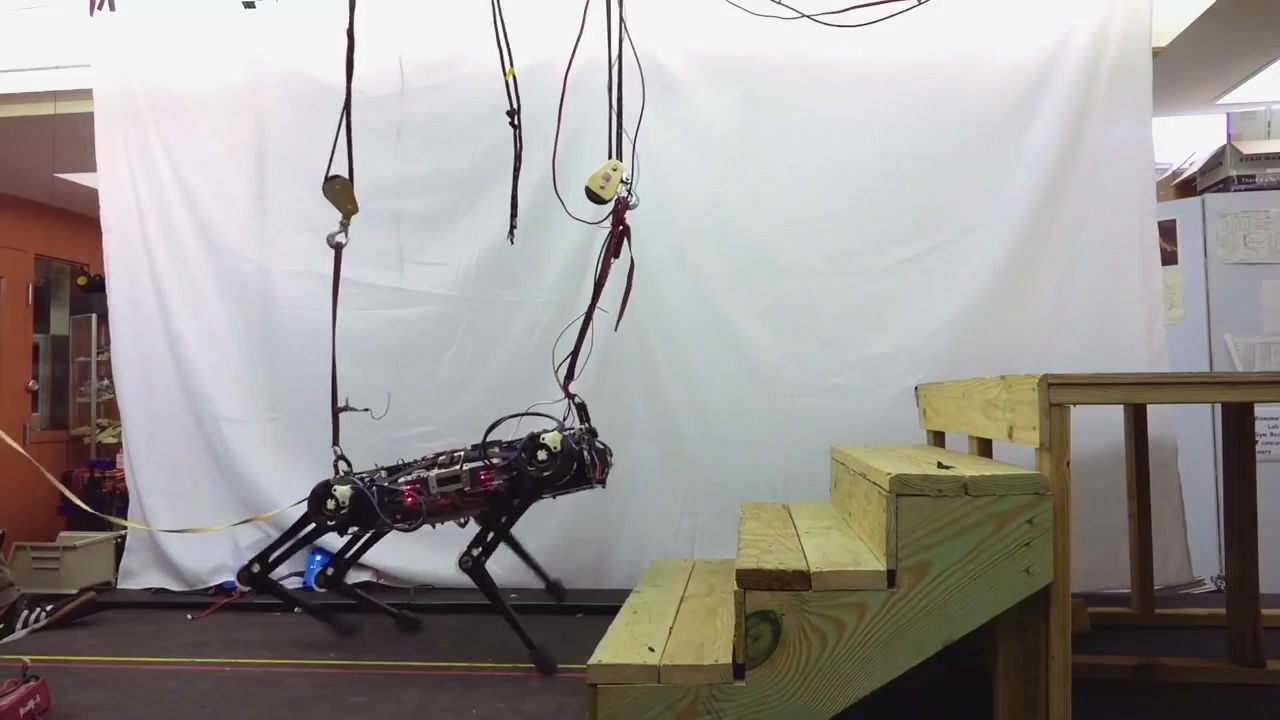
Cheetah going up the stairs where obstacles scattered. Surprisingly, no camera is attached to Cheetah, and there is no input of visual information. With the function "blind locomotion" which combines the contact detection algorithm and model predictive control algorithm, attitude control is possible even with an unstable footing without relying on the camera.

Even though he was taking his legs with an easily moving obstacle, he went up excellently.

Sometimes, it is lovely to fall.
Cheetah trying to climb the stairs ......
I will pull on the attached rope and get in the way.
Cheetah was dragged out of the stairs, but it never crumbled.
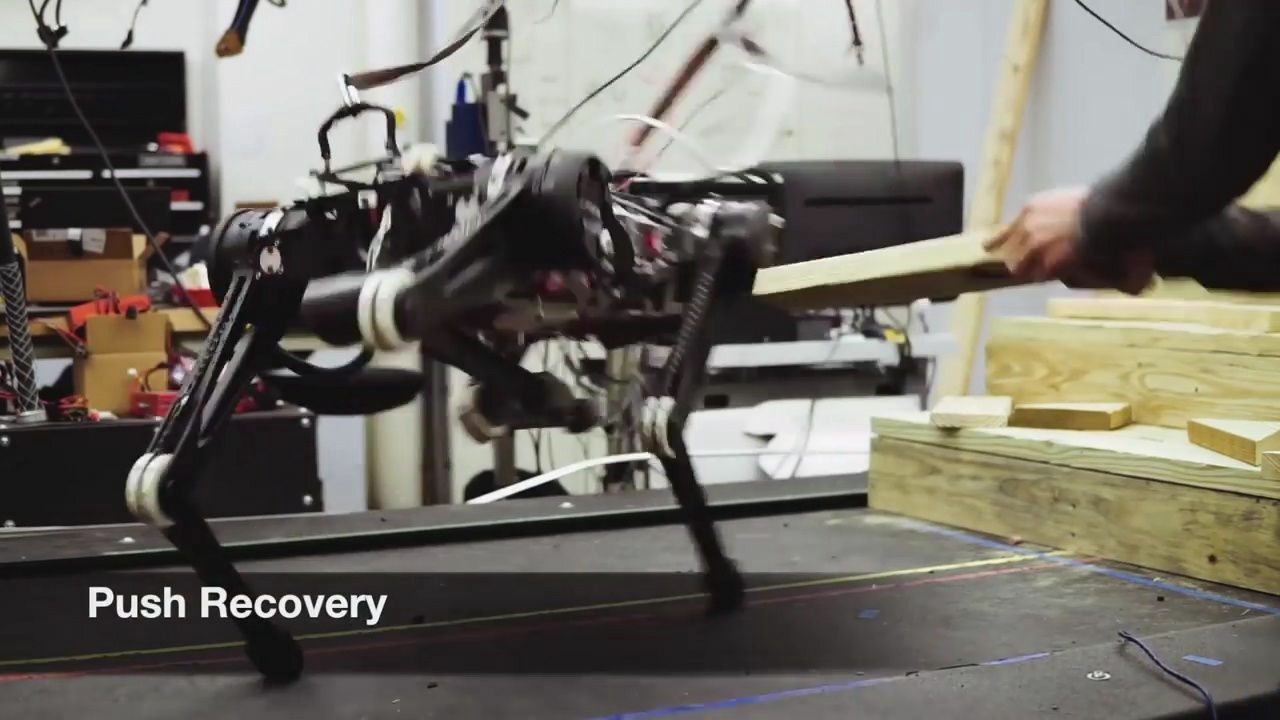
Even if you interfere with the stick while walking ......
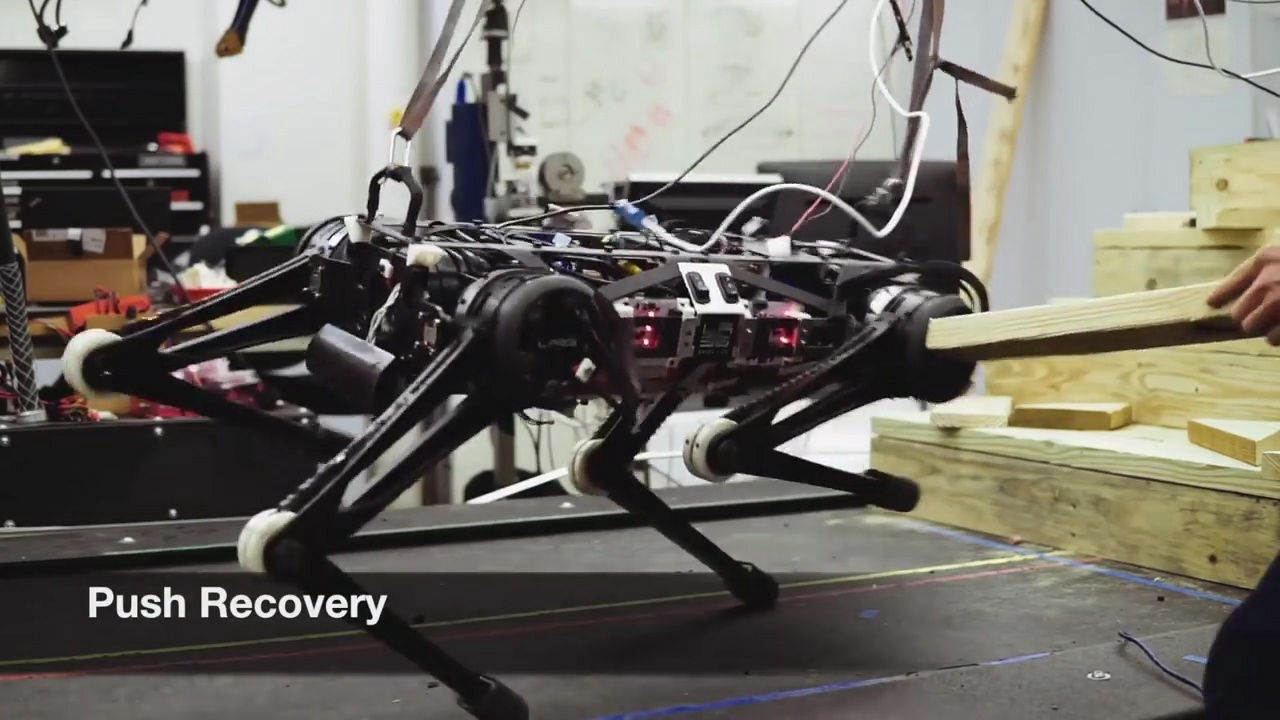
Even though it is going to collapse, it stamps with excellent posture control.
If you lower your posture to sink ... ...
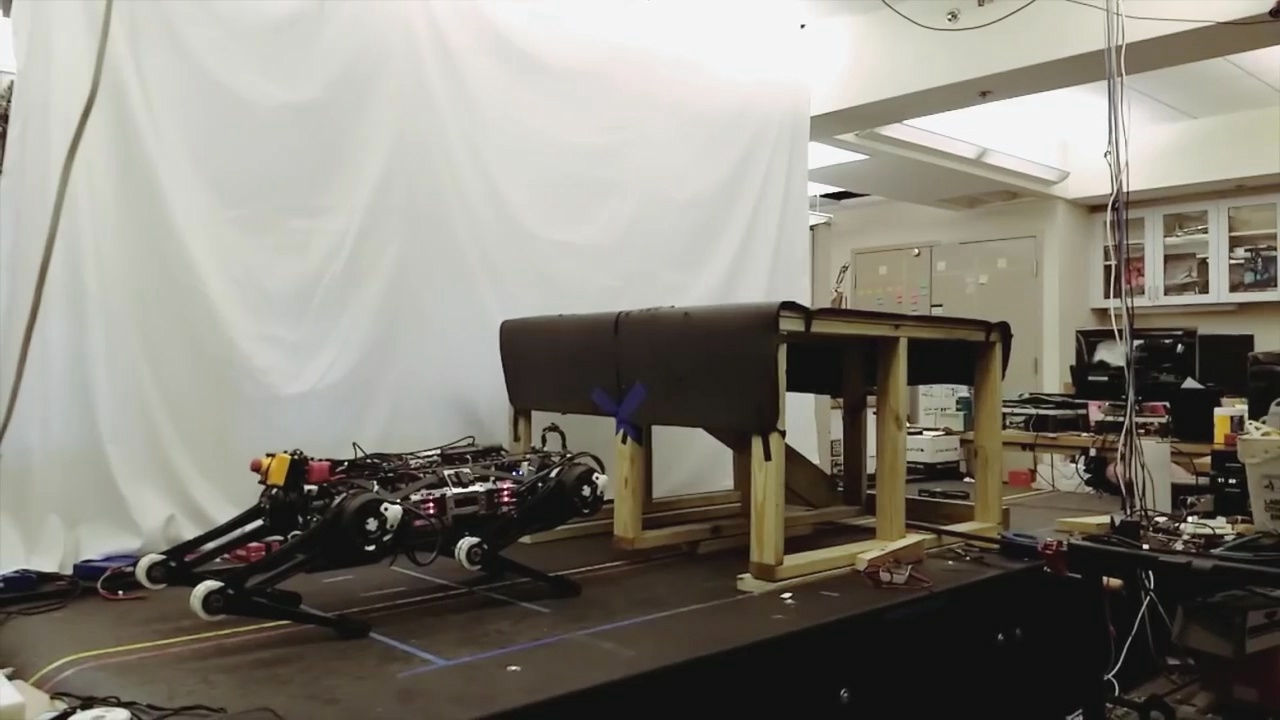
Stretching at a stretch ......
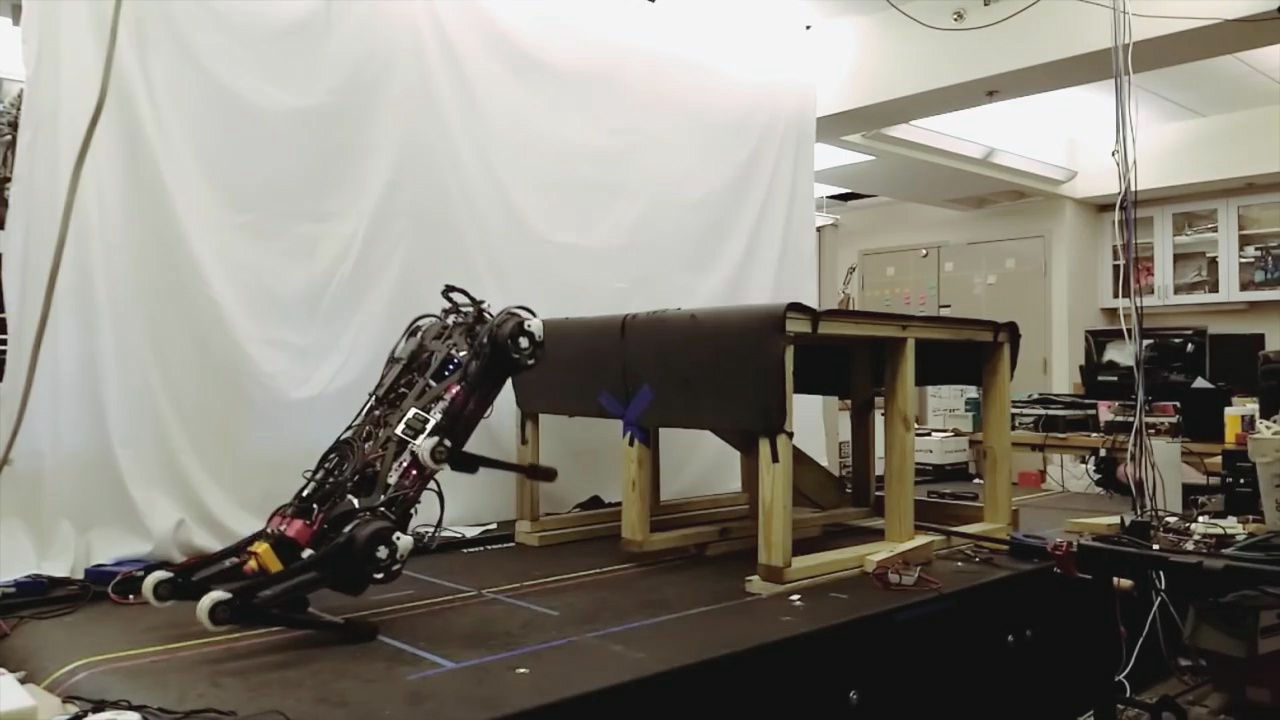
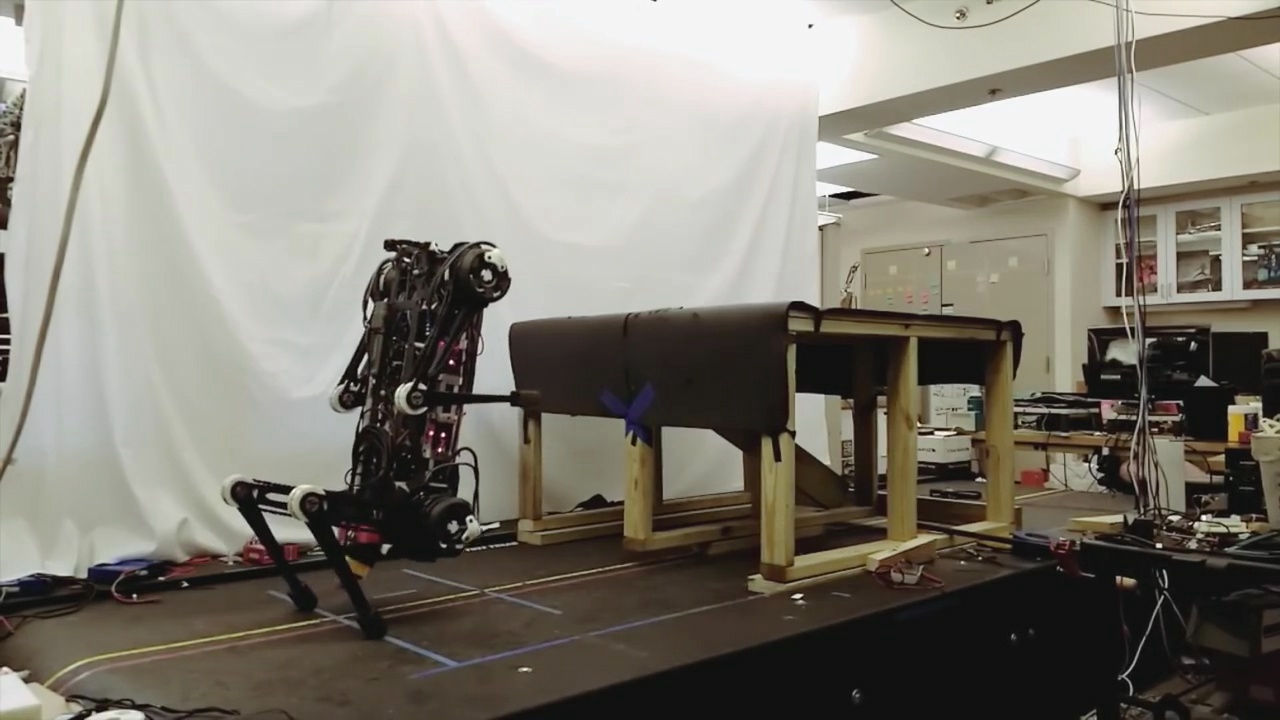
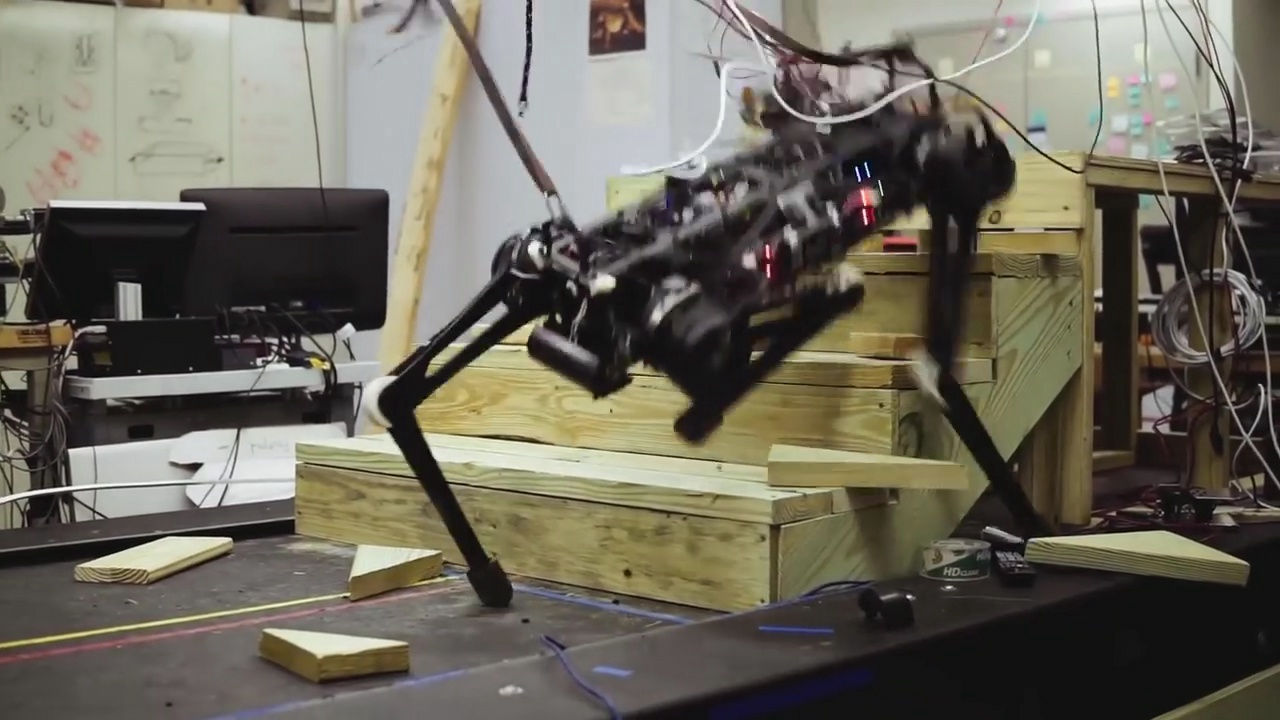
Jump

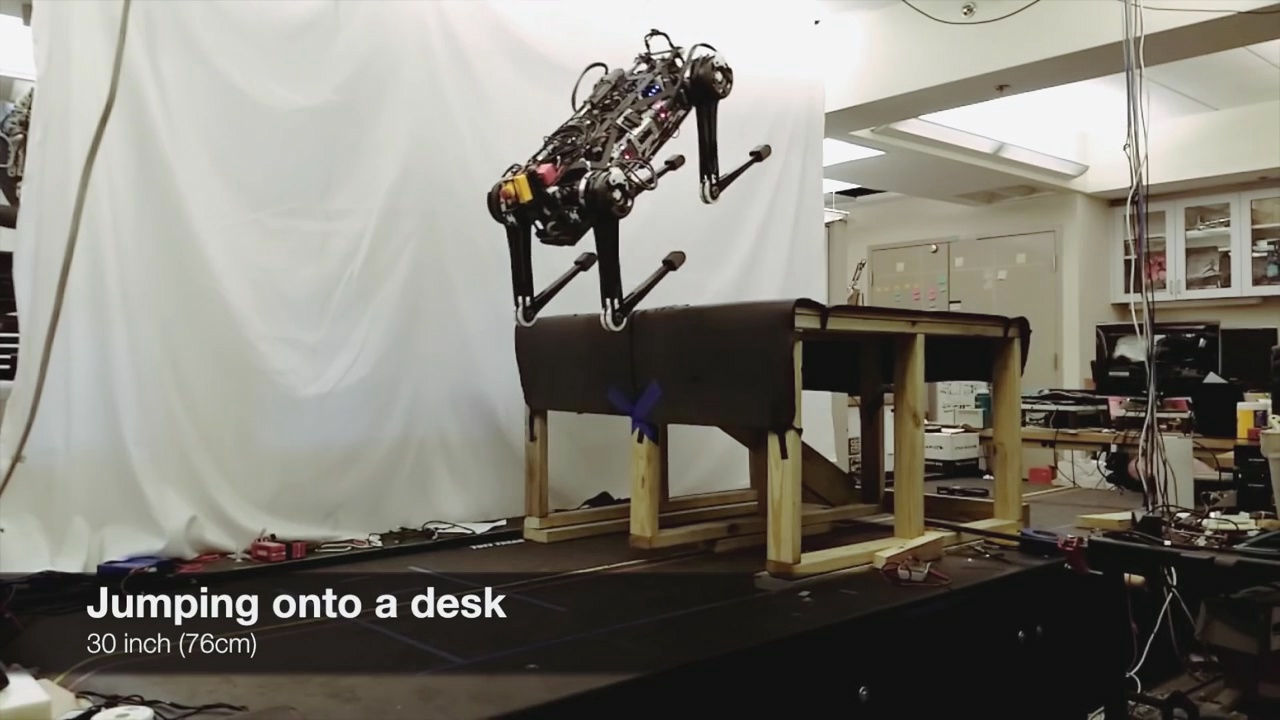
I succeeded in jumping over the 30 inch (about 76 cm) base.

The movie was released this time is the third generation Cheetah. It is planned to evolve to be able to perform work in the dark, difficult to explore by humans within a few years, because it is possible to go forward in a well-balanced manner or ascend a staircase without image recognition processing by the camera, Mitsubae Kim of MIT Biomimetics Robotics Lab "He says.
Cheetah 3 will be open to the public on October 2018 at "International Conference on Intelligent Robots" in Madrid, Spain.
· Bonus : Compared with the following conventional models, you can understand the process of Cheetah's evolution well.
Cheetah type robot of MIT development is completely self-sustainable and can also jump over obstacles - GIGAZINE
Related Posts:





