Google releases a terrible movie that lets you learn by acting explosively the behavior that human beings learn over several years by 14 self-learned robotic arms

The technology of deep learning that learns skills by computers and robots learning by themselves has become a topic more frequently, one of the real excellence points of this technology is that it allows multiple learning It can be pointed out that distributed self-learning which can proceed simultaneously and in parallel is possible. A number of robots · AI (artificial intelligence) researches are being conducted on Google, distributed self-learning using 14 robots is performed, and it seems that the behavior is going to master at a higher speed than human It is contained in a movie.
Research Blog: Deep Learning for Robots: Learning from Large-Scale Interaction
http://googleresearch.blogspot.jp/2016/03/deep-learning-for-robots-learning-from.html
14 robot arms learn to hold in a cluttered world
https://thestack.com/iot/2016/03/09/googles-hive-mind-robot-arms-learn-to-negotiate-a-cluttered-world/
Sergei Levine, who is conducting robot research at Google, has published blogs on the state and results of distributed self-learning by multiple robots. The following movies are introduced in the blog, and you can see the state of the research and the course of learning.
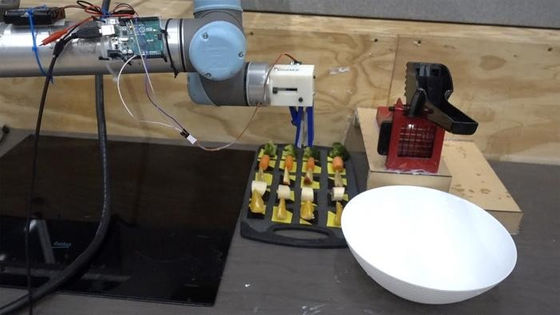
A movie containing the state of the research facility is Kore. You can see the robot placed on the table and the state of the assignment given.
Large-scale data collection with an array of robots - YouTube
Arm type robot which starts movement at once. I'm learning how to grab things correctly while repeating the action of pinching the living goods placed on the lower tray with a lever like a finger.
After a while, let each show different movements. It is clear that you are doing movement according to the situation where each person is placed.

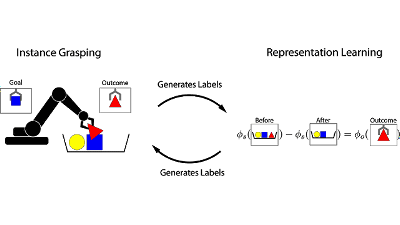
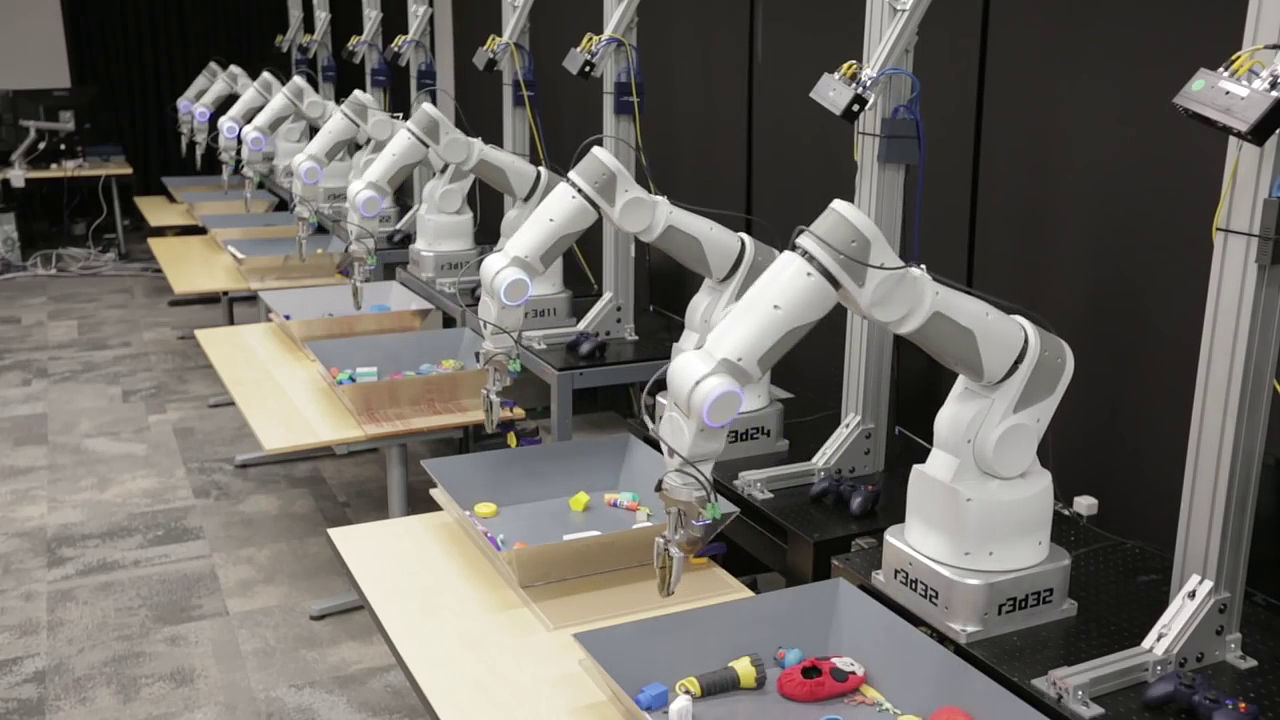
An arm robot arranged in a room with a slurry. You can see the staff in the center. A camera is attached to the arm, and movement and images of the robot are accumulated. The self-learning experience data thus obtained are collected daily and imitated the image / video recognition and the neuron structure of the brainConvolution neural networkIs used for learning to predict what kind of result will be born from vision and movement of each part. The "intelligence" which learned in this way is mounted on the robot again the next day, and the ability gets steadily rising by having experience again.

In that learning, the robot seems to get various wisdom. In the following movie, you can see not only grasping things simply, but also getting acquainted with ingenuity to grab well.
Learning hand-eye coordination for robotic grasping - YouTube
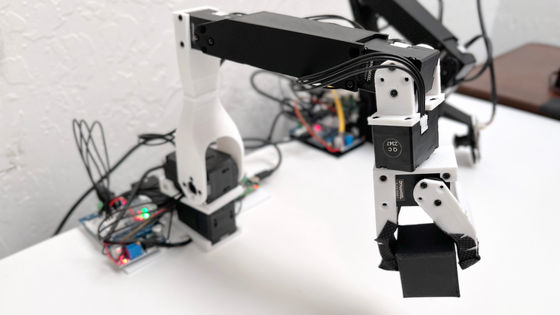
The fingers of the robot that can be seen above. I am trying to grab the yellow block inside the red frame, but the black stapler is in the way.
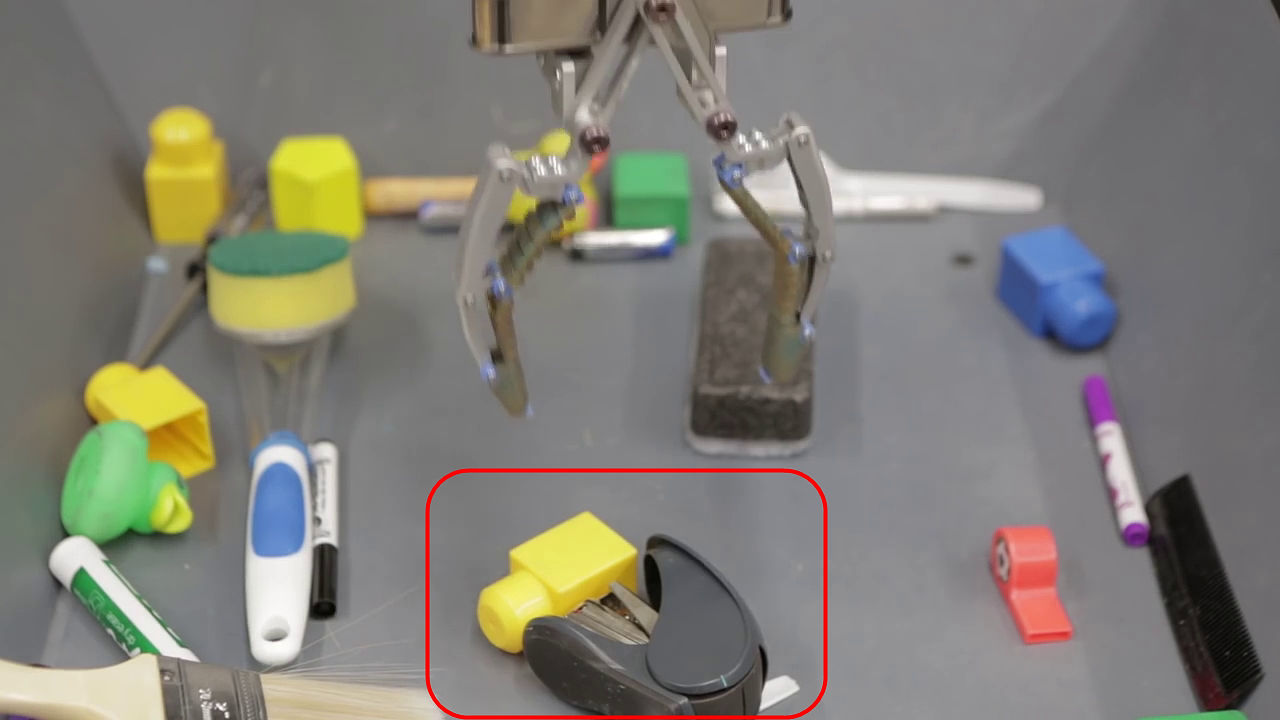
Then the robot pushed the stapler with his fingers and moved it to a position not to get in the way.
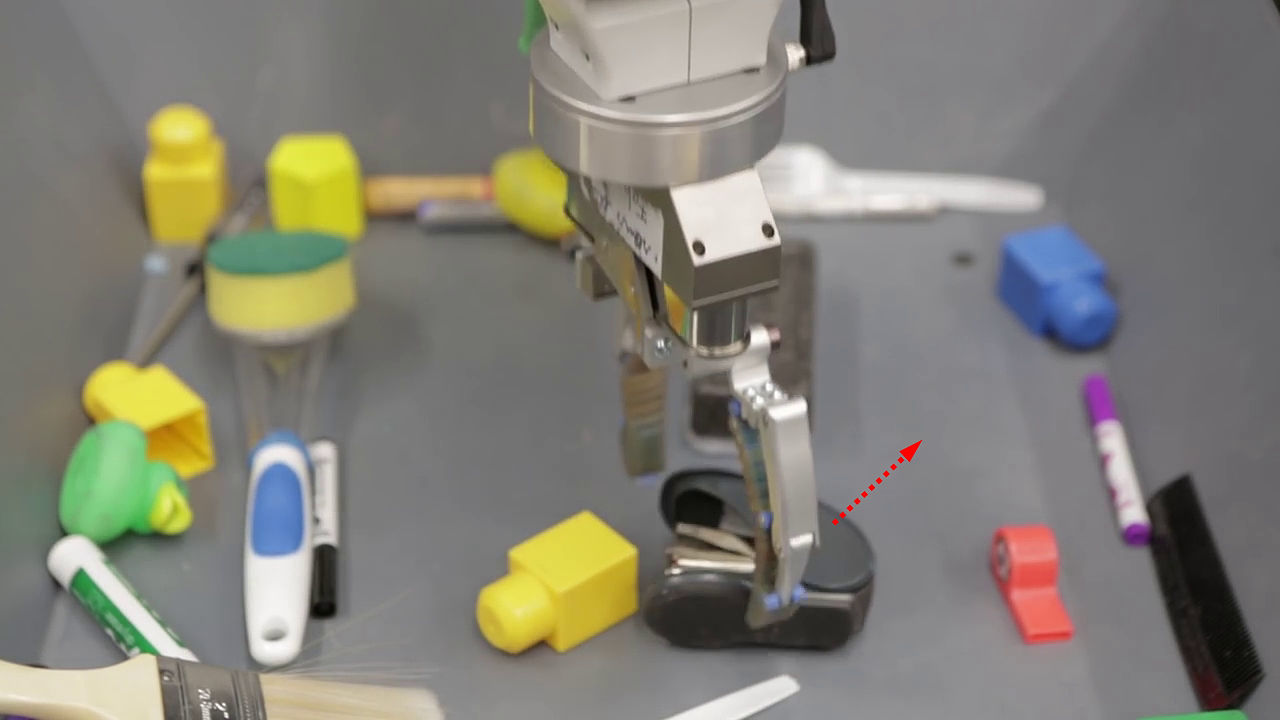
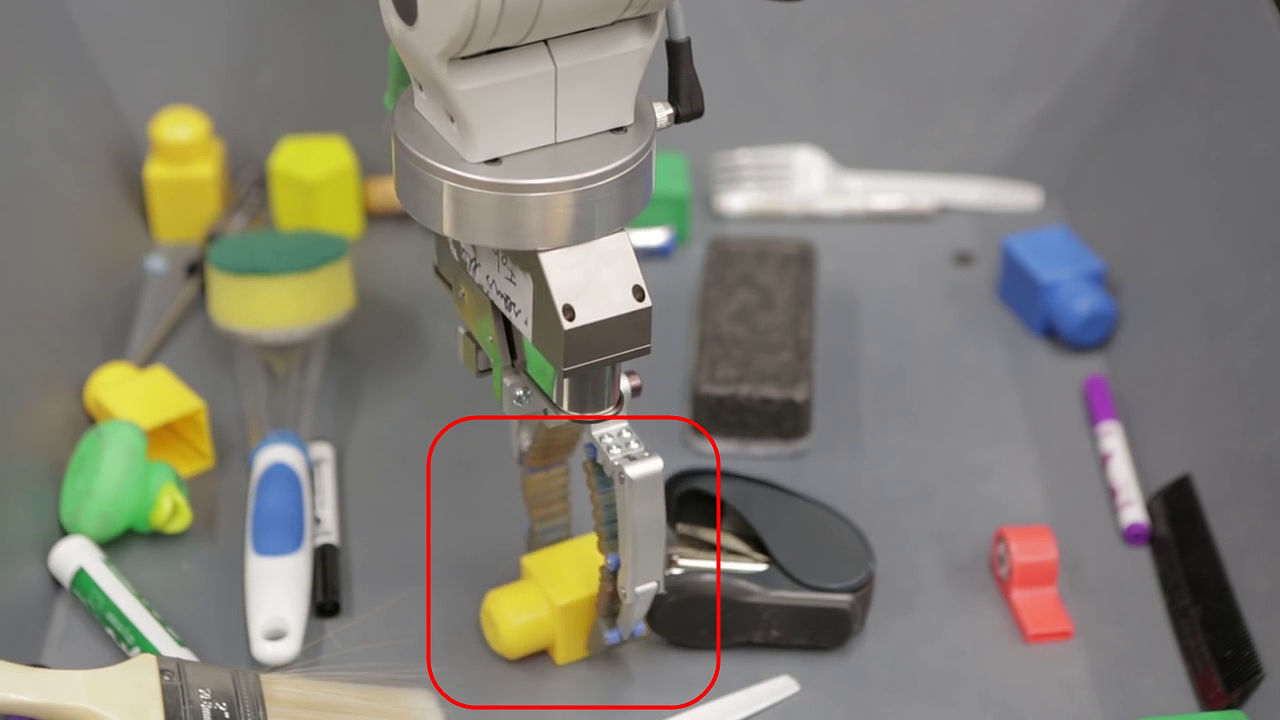
In this way, the robot successfully seized the yellow block brilliantly. I am surprised that this movement is not programmed in advance, it is the wisdom that the robots (self) learned themselves.
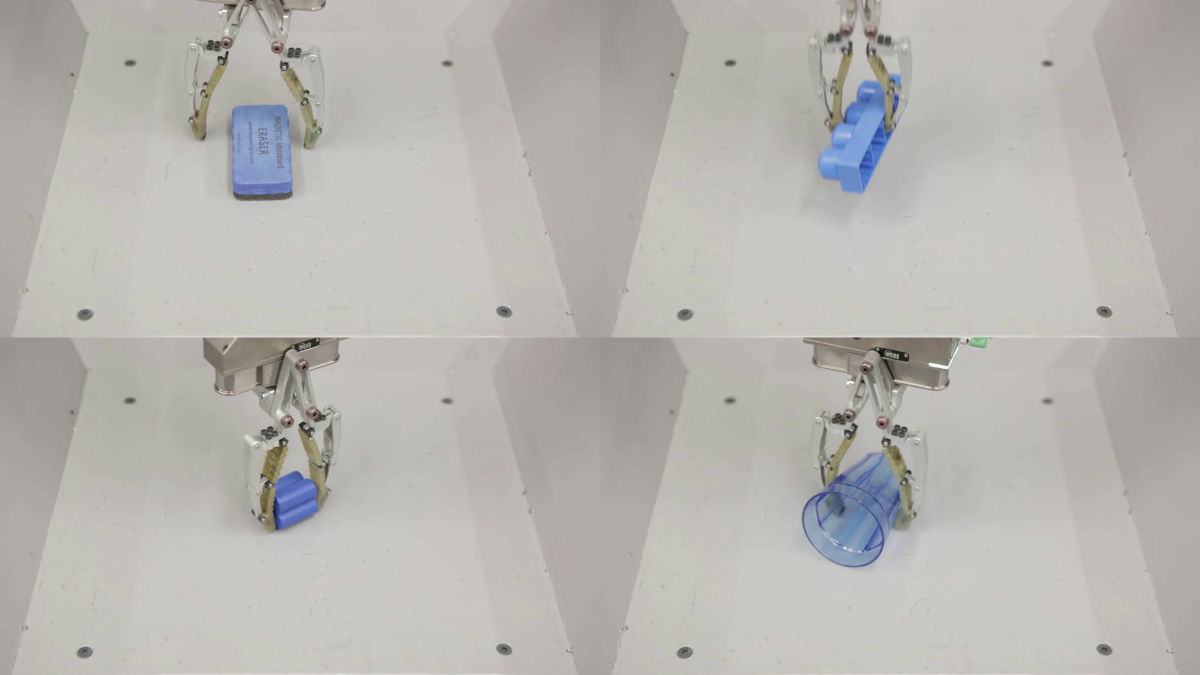
Moreover, it seems that you are learning your own strength. In this way, in addition to grabbing soft things ......
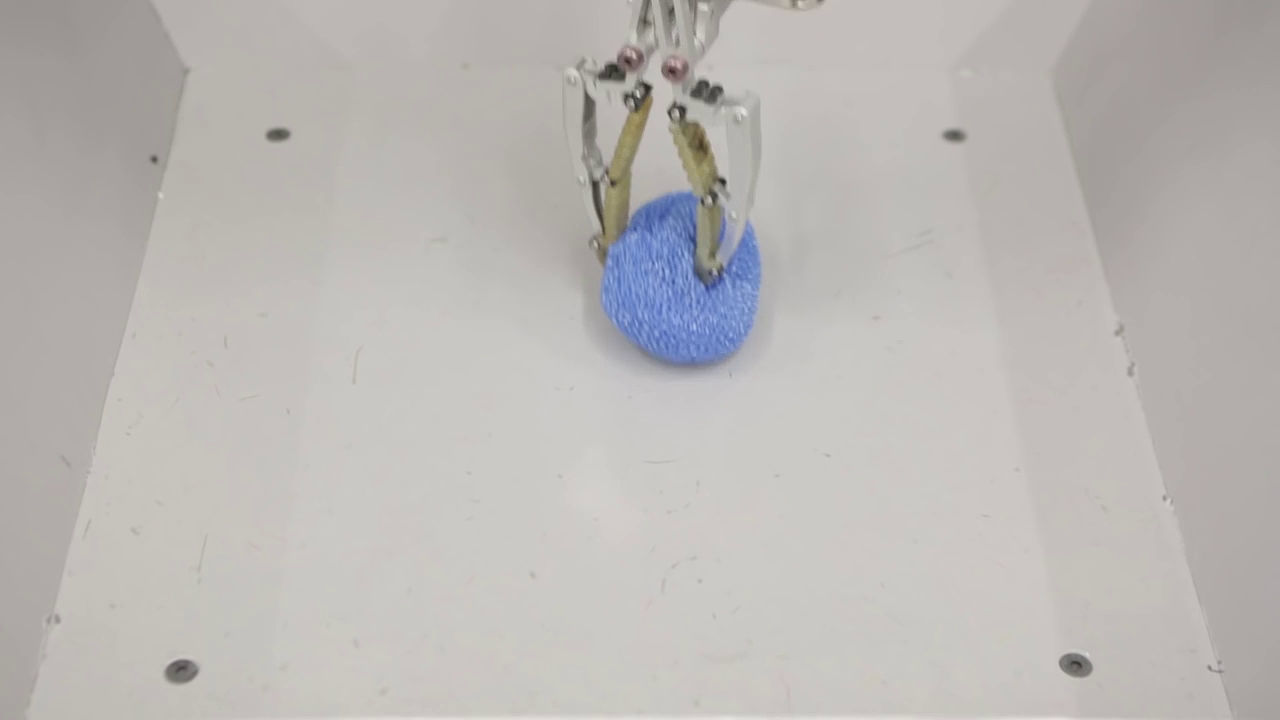
You can see how you are changing the grasping method according to various shapes / materials.
You can see the before-after by this learning with the following two movies. It is an action to move things gripped by fingers to the next tray, but it is the state of the stage where learning is not done much at first.
One-shot grasping many leads to failed grasp attempts - YouTube
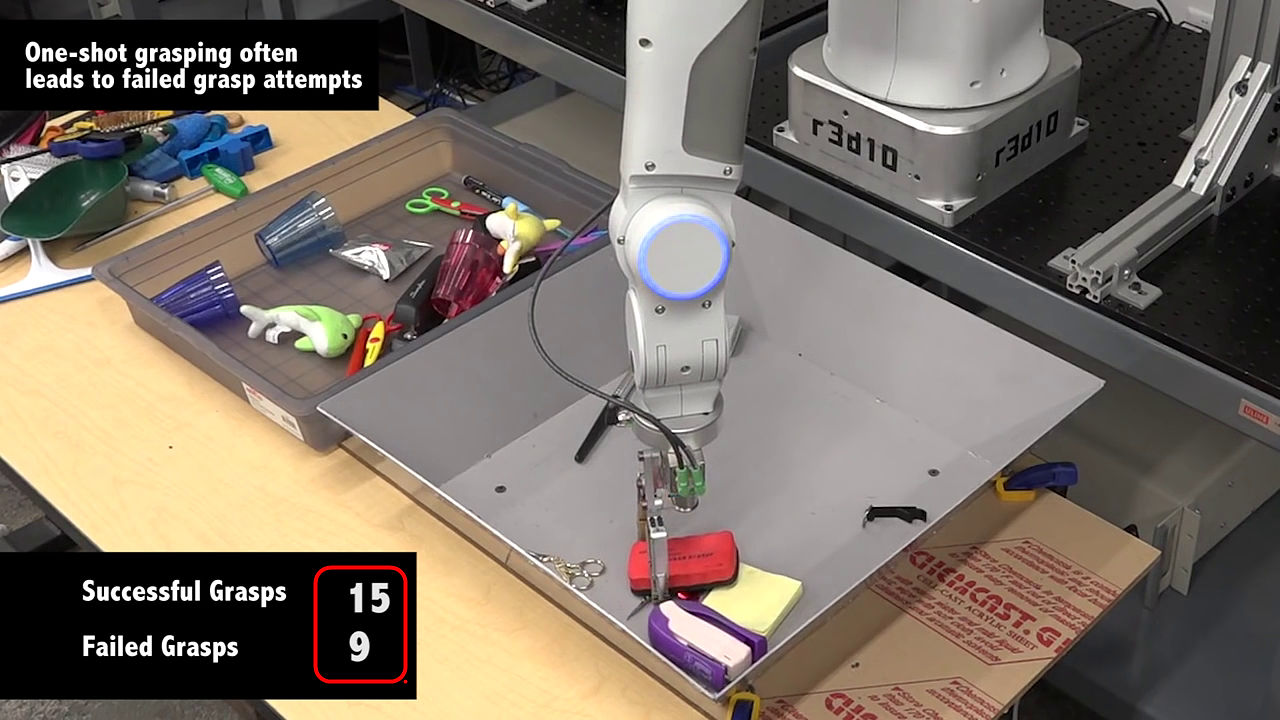
Test to seize living supplies placed on the tray. At the bottom left of the screen, there is a counter to count the number of successes and failures.

The middle course of the time when it started after a while, success is 15 times and failure is 9 times.
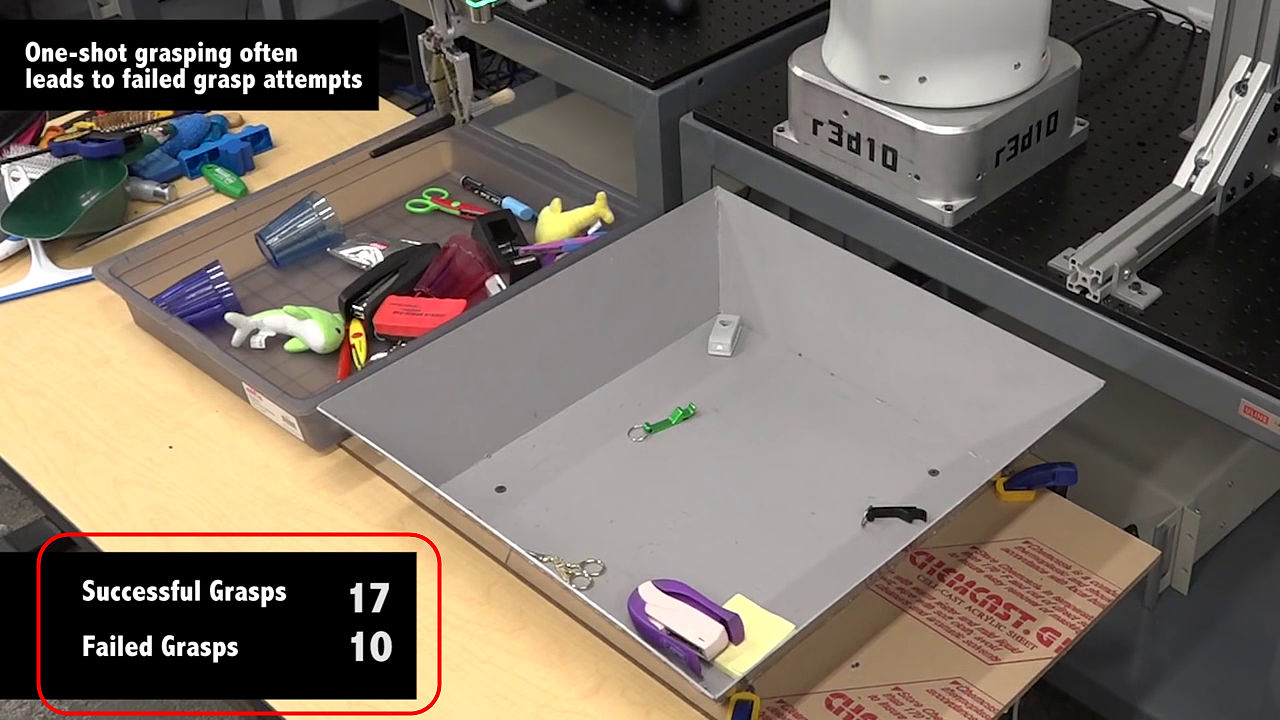
Ultimately, 17 successes and 10 failures resulted in a failure rate of about 37%. Also, on the tray there are some things left behind.
Next, the same test was carried out in a state after repeating feedback by learning.
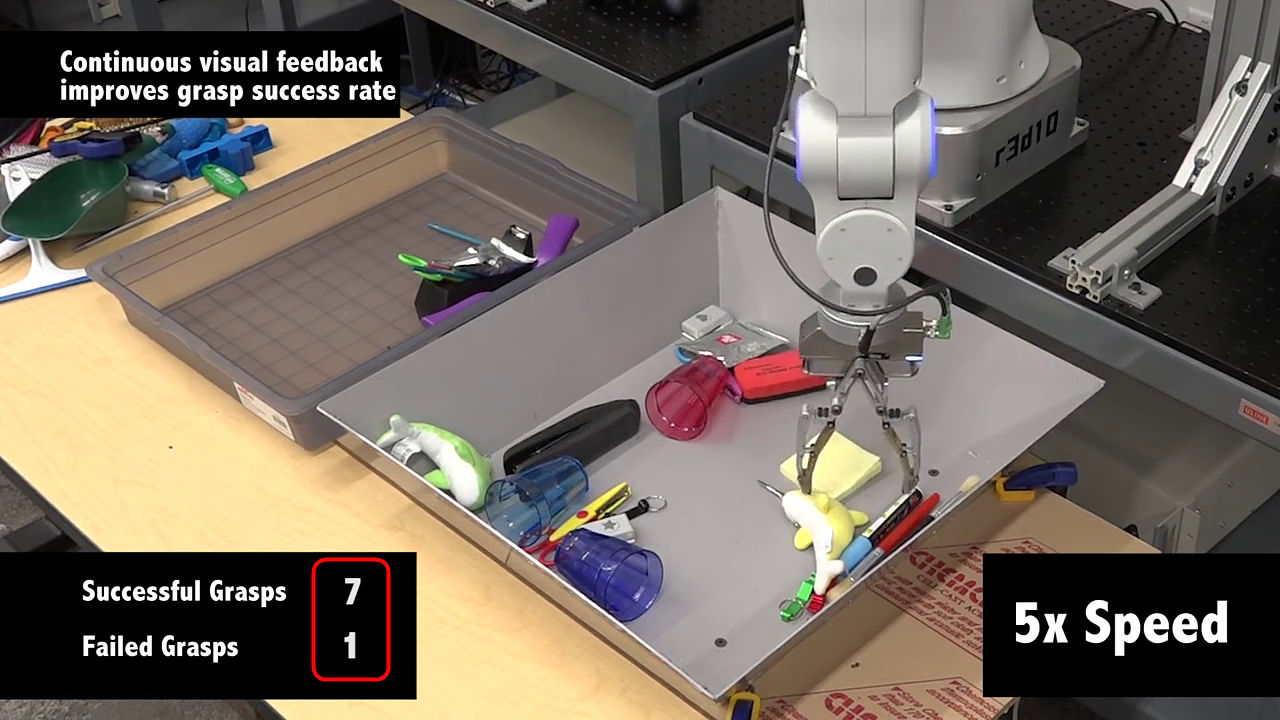
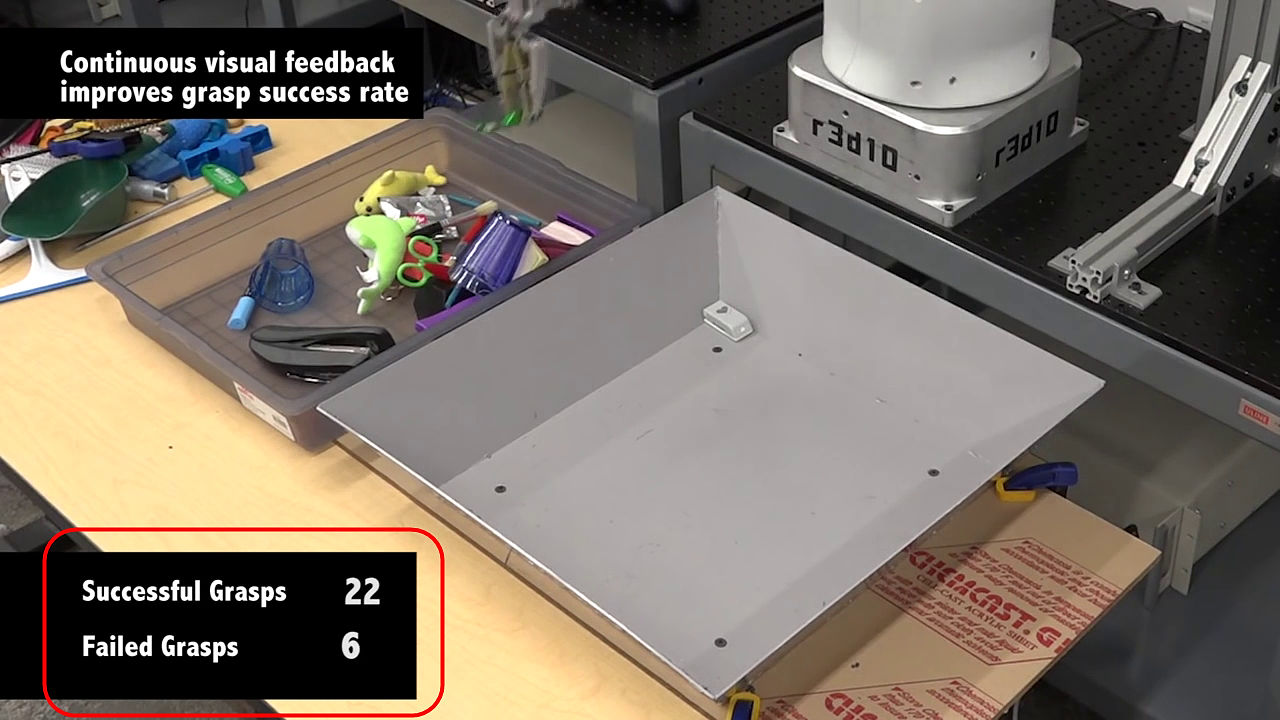
Continuous visual feedback improves grasp success rate - YouTube
Start testing from the same state. The placement and the number of the placed objects are not completely unified.

The number on the way is 7 to 1, which clearly shows that the failure rate is decreasing.
The final result is that the success rate is 22 times and the failure is 6 times, the failure rate has dropped 16 points, about 21%.
Normally, it is said that human babies begin to remember grasping things from around 1 year old, and acquire certain abilities at about 5 years old. These plural robots realize very quick capability acquisition by repeating such learning hundreds of thousands times in total. Although this example is a very limited movement, it can not be said that the same learning as a human body using the whole body can be said, but it will eventually make me feel that it will not be realized so far It is a sight.
Related Posts: