Why are elephants being studied for robot design?

Elephants use the tips of their trunks to grasp things with great precision – how this can help robotic design
https://theconversation.com/elephants-use-the-tips-of-their-trunks-to-grasp-things-with-great-precision-how-this-can-help-robotic-design-231309
Kostos' team was studying how much power the tip of an African elephant's trunk has and how dexterous its 'pinching' ability is. Previous studies measured the overall force applied when an elephant wraps its trunk around an object to lift it, but in a paper published in May 2024, they focused on the tip of the trunk to investigate the magnitude and structure of the force.
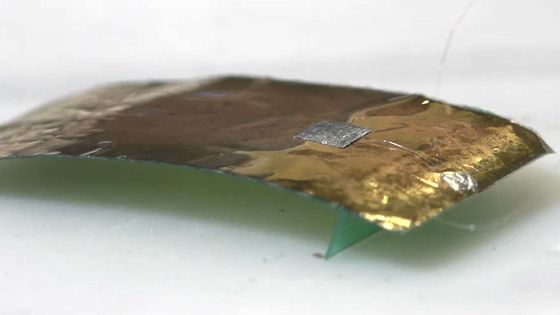
In the study, they set up a device that would release an apple as a reward if it recorded the force of the pinch, and measured the grip strength of the elephant's trunk. The image below shows an elephant actually using the device. Each time the elephant received an apple, the grip strength required to get the next apple increased, so the elephant had to pinch harder than the previous time, and the mechanism was set up to measure the maximum force that the elephant could exert with its trunk.

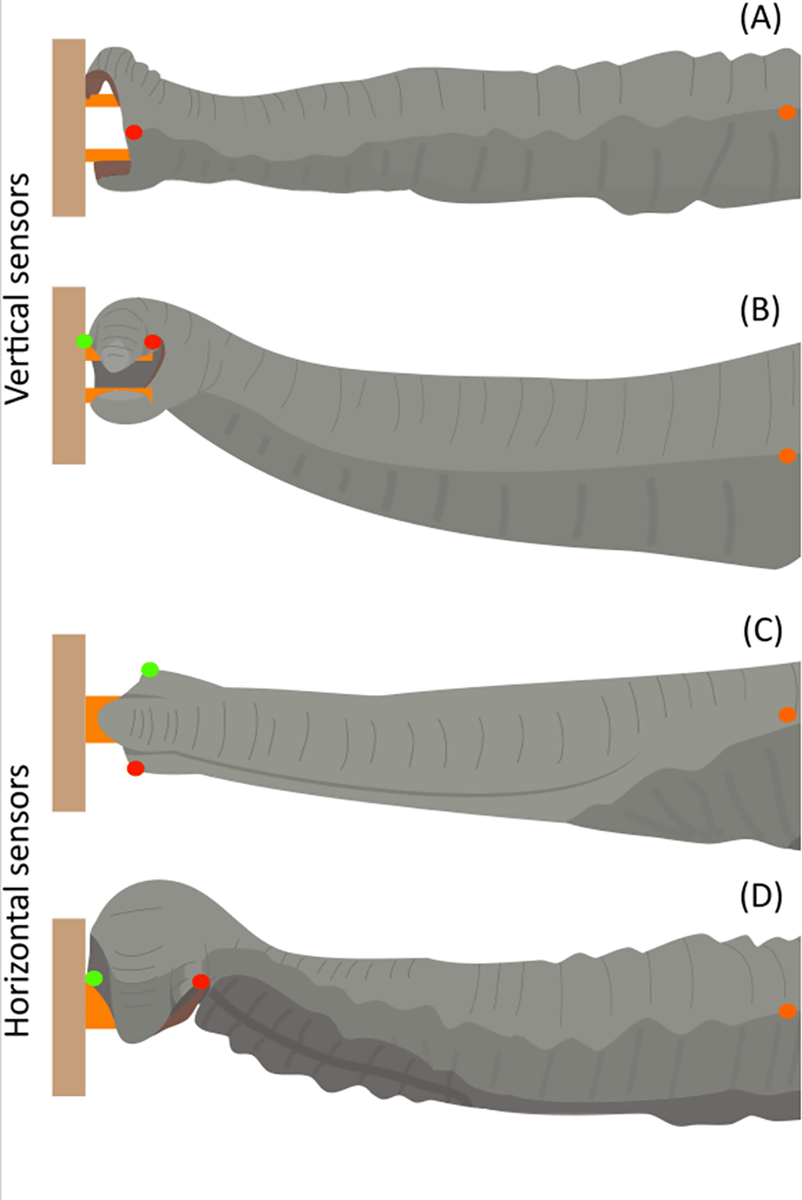
During the observation, it was found that there are four patterns of trunk movement when the elephant pinches the sensor of the device. The figure below illustrates the movement of the elephant's trunk, from the top, 'A' is the state where the nose is stretched straight out in front of the nose, 'B' is the shape of twisting the tip of the nose and pinching it from the side, 'C' is the state where the nose is stretched straight out while twisting, and 'D' is the pattern where the nose is twisted and pinched from the side.
A study of five female elephants at the zoo found that the force with which an elephant's trunk pinches an object is maximum when the trunk is extended straight, measured at 86.4 Newtons. The force that gives a mass of 1 kilogram an acceleration of 1 meter per second is 1 Newton, while the pinching force between a human's thumb and index finger is 49 to 68 Newtons. An elephant's trunk can 'pinch' with more force than a human finger, but the force is not too strong, and it can pinch objects without exerting a large force.
The movement of 'firmly gripping an object without applying strong force' is a function required for a technology called 'soft gripper' required for robots, and 'analyzing the structure of the elephant's trunk will provide information that will be useful in developing a soft gripper,' says Costos.
The University of South Wales conducted an experiment on a robotic soft gripper inspired by an elephant's trunk in 2020. The following movie was released by the University of South Wales, showing a soft robotic gripper made of cloth wrapping around various objects and lifting them up.
According to the researchers, the robotic gripper is equipped with sensors that detect the forces acting on it and wrap around the object it comes into contact with with greater force to prevent damage, and a heat-activated mechanism allows the fabric gripper to stiffen or soften. The flexible motion of the robotic gripper is modeled after a biological model of an elephant's trunk, which can move powerfully and precisely in multiple directions.

In their research, Kostos and his team discovered for the first time that the two 'fingers' at the tip of an elephant's trunk exert different forces on each of them. By studying elephants in a wider range of habitats and ecologies and gaining a detailed understanding of the mechanism of the trunk, it will be possible to advance research into robotics, such as 'robot therapy that does not put a burden on the human body,' 'robots that can move flexibly in rugged environments,' and 'machines that harvest vegetables and fruits without damaging them,' and 'it will also be meaningful in correctly understanding the environment necessary for elephant habitats and protecting elephants,' said Kostos.
Related Posts: