How a robotic arm will remove nuclear fuel debris from the Fukushima Daiichi reactors
The tsunami caused by the Great East Japan Earthquake on March 11, 2011 caused a loss of power at the Fukushima Daiichi Nuclear Power Plant, leading to simultaneous meltdowns at three nuclear reactors. Tokyo Electric Power Company, the operator of the plant, is currently working on a plan to use a robotic arm to remove the molten nuclear fuel debris from the reactors.
TEPCO | Fuel debris portal site
Status of fuel debris removal - Decommissioning Project | Status of decommissioning work | Tokyo Electric Power Company Holdings, Inc.
https://www.tepco.co.jp/decommission/progress/retrieval/
Fukushima Reactor: TEPCO robot aims to extract nuclear fuel - IEEE Spectrum
https://spectrum.ieee.org/fukushima-reactor
Tokyo Electric Power Company (TEPCO) is planning to use a robotic arm to remove approximately 880 tons of nuclear fuel debris from the Fukushima Daiichi Nuclear Power Plant in preparation for decommissioning. The plan itself has been in the works since April 2017 as a joint project between the International Research Institute for Nuclear Decommissioning (IRID), Mitsubishi Heavy Industries, and Veolia Nuclear Solutions, a British nuclear company.
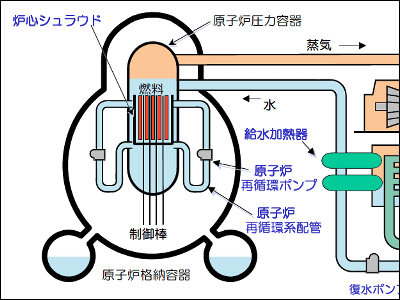
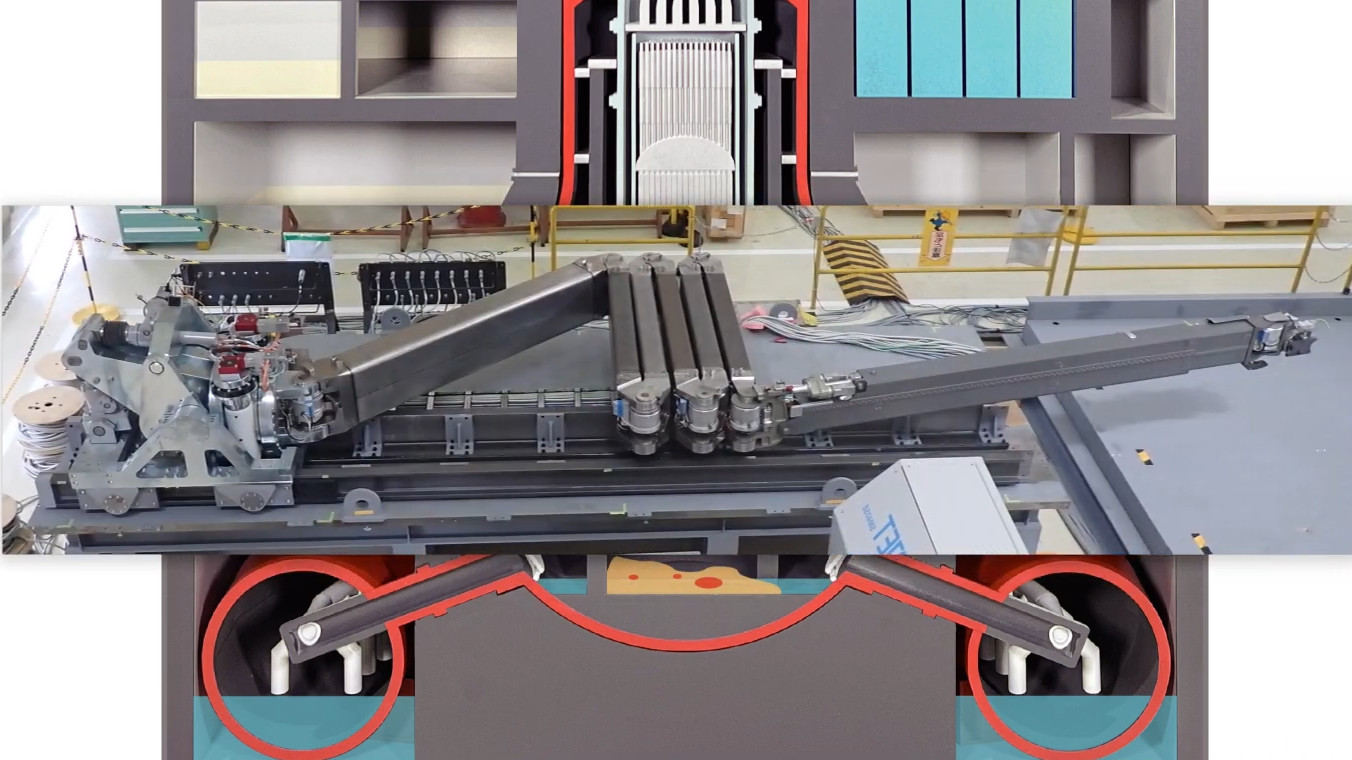
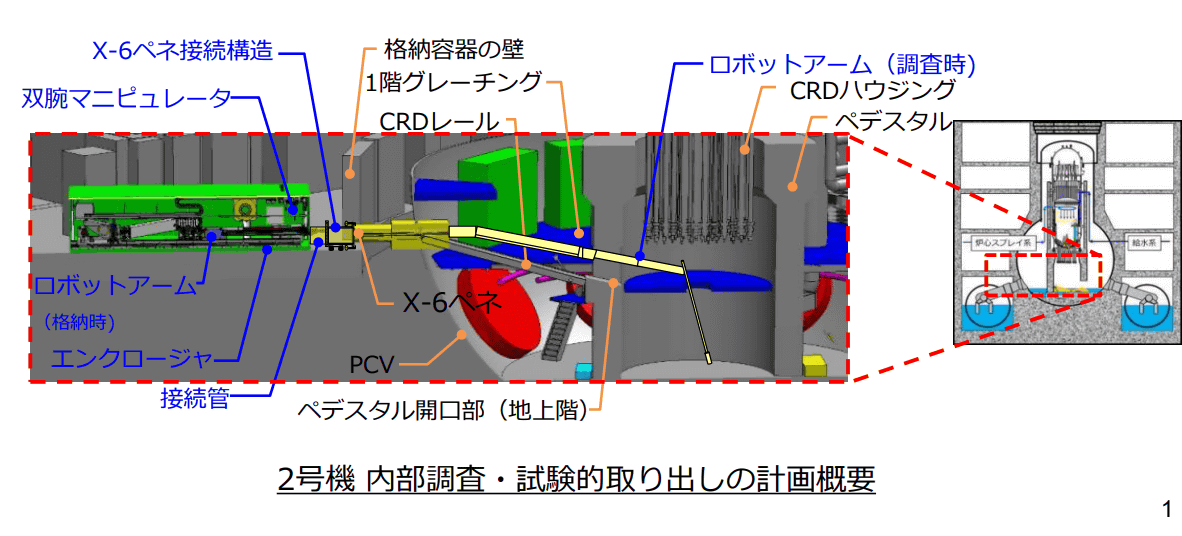
The primary containment vessel (PCV) of the nuclear reactor is a 33m-tall steel structure that looks like an upside-down light bulb and houses the reactor pressure vessel. The plan was to insert the developed robot arm through a side hole about 55cm in diameter that connects to the PCV and remove the nuclear fuel debris. The robot arm, which was released in 2019, can be seen in the movie below.
Robot arm that removes melted nuclear fuel revealed - YouTube
The removal work was scheduled to begin in 2021, but was postponed three times due to delays caused by the COVID-19 pandemic and the inability of the robotic arm to weave through narrow gaps to reach the nuclear fuel debris accumulated just below the pressure vessel.
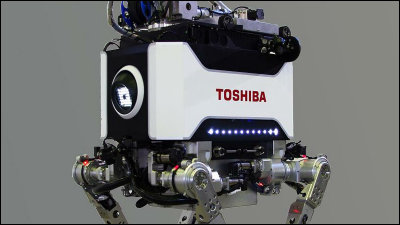
The robot arm that will be used in 2024 is a fishing rod-style device that can extend up to 22m by connecting 20cm and 16cm pipes. It is made of stainless steel and aluminum, weighs about 4.6 tons, and has 18 degrees of freedom. The end of the arm is equipped with a hanging gripper claw.
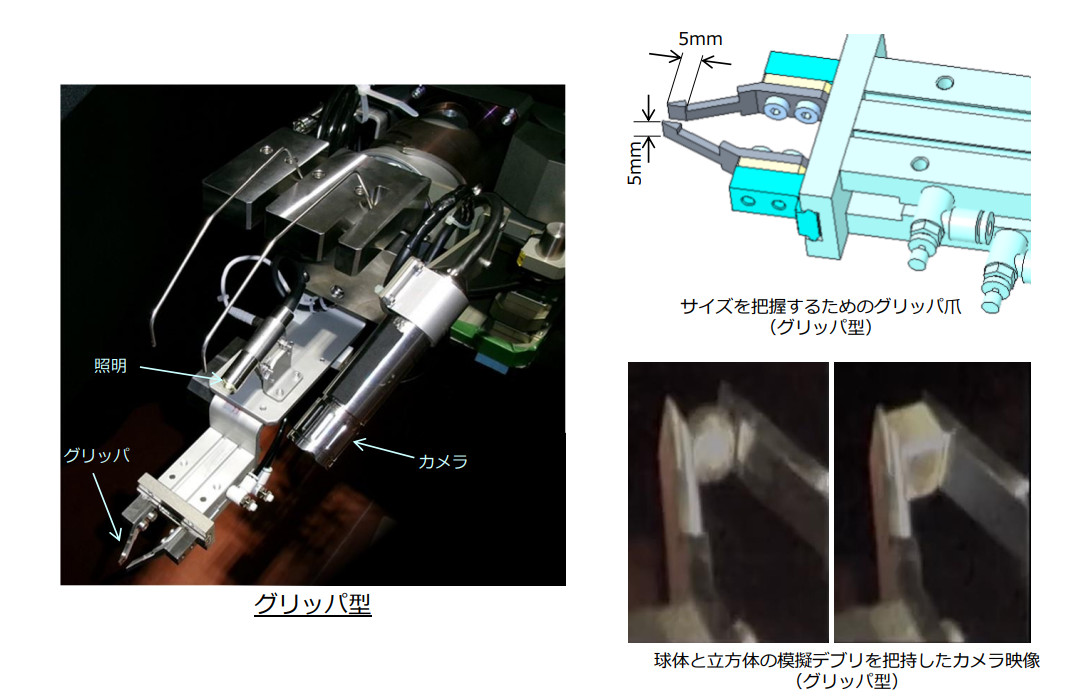
The procedure is to set up an isolation chamber next to the PCV, drill a side hole, insert a robot arm through the hole, and then hang a gripper claw to remove the nuclear fuel debris that has accumulated in the lower layer. The removed nuclear fuel debris will be sent for compositional analysis.
The following movie released by TEPCO explains the procedure for actually removing the nuclear fuel debris.
Unit 2 fuel debris trial removal work - YouTube
In August 2024, tests to remove nuclear fuel debris began at Unit 2, which sustained relatively less damage than the other reactors. However, a pipe connection error was discovered, and work was temporarily halted. Work resumed in September, and video footage confirmed that some of the rubble inside the PCV had been grasped. It is unclear whether this rubble is debris.
A movie of the test removal work of the No. 2 reactor nuclear fuel debris, which was actually carried out on September 14, 2024, can be viewed on the following page.
Video Archive | Photo and Video Library | Tokyo Electric Power Company Holdings, Inc.
https://www.tepco.co.jp/library/movie/detail-j.html?catid=107299&video_uuid=15441
However, shortly after, it was discovered that some of the images from the camera attached to the tip of the robot arm were not being properly transmitted to the monitor in the remote control room, and the work was halted. It is believed that the cause was that the camera had been turned off once inside the PCV, where radiation levels were high, and it could not be restored.
TEPCO subsequently announced on October 21, 2024 that it had replaced some of the cameras starting on October 16 and confirmed that the camera footage was being properly sent to the remote control room. The timing for resuming test removal of nuclear fuel debris will be announced once all camera replacement work has been completed and the procedures for resuming work have been confirmed.
Related Posts: