'Open Dynamic Robot Initiative', an open source project that can create low-cost and lightweight quadrupedal walking robots
When you think of a quadruped walking robot, you can think of
Open Dynamic Robot Initiative · GitHub
https://github.com/open-dynamic-robot-initiative
Open Dynamic Robot Initiative
https://open-dynamic-robot-initiative.github.io/
The Open Dynamic Robot Initiative's 3D printed robot dog can now be remote-controlled --3D Printing Industry
https://3dprintingindustry.com/news/the-open-dynamic-robot-initiatives-3d-printed-robot-dog-can-now-be-remote-controlled-196801/
The Open Dynamic Robot Initiative is a joint open source project led by multiple robot-related research institutes, including the Movement Generation and Control Group at the Max Planck Institute, the Laboratory for Analysis and Architecture of Systems at the Scientific Research National Center in New York University, and the Laboratory for Analysis and Architecture of Systems. .. The project initially starts with the development of low-cost actuators that can be used to build a variety of robots, and ultimately aims to develop the low-cost and lightweight robots required by the robot research community.
You can see what the quadruped walking robot actually developed by the Open Dynamic Robot Initiative looks like by watching the following movie.
Introduction Video --Open Dynamic Robot Initiative --YouTube
This is a quadruped walking robot developed by the Open Dynamic Robot Initiative. From the state where the four legs are folded ...
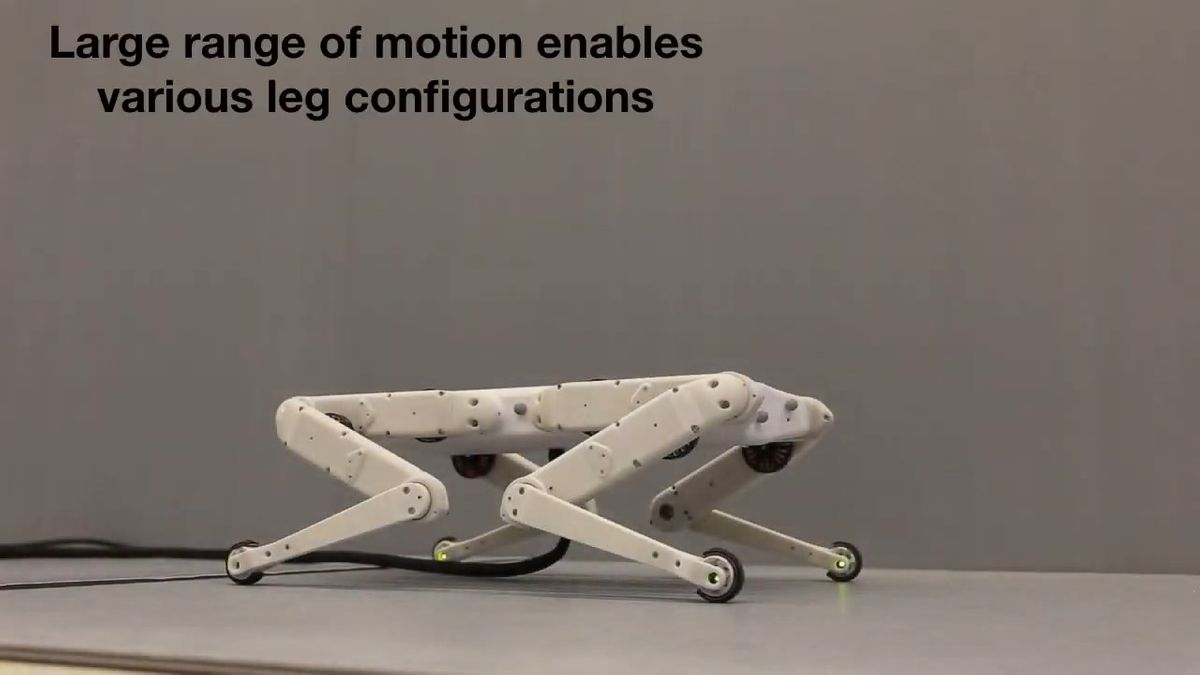
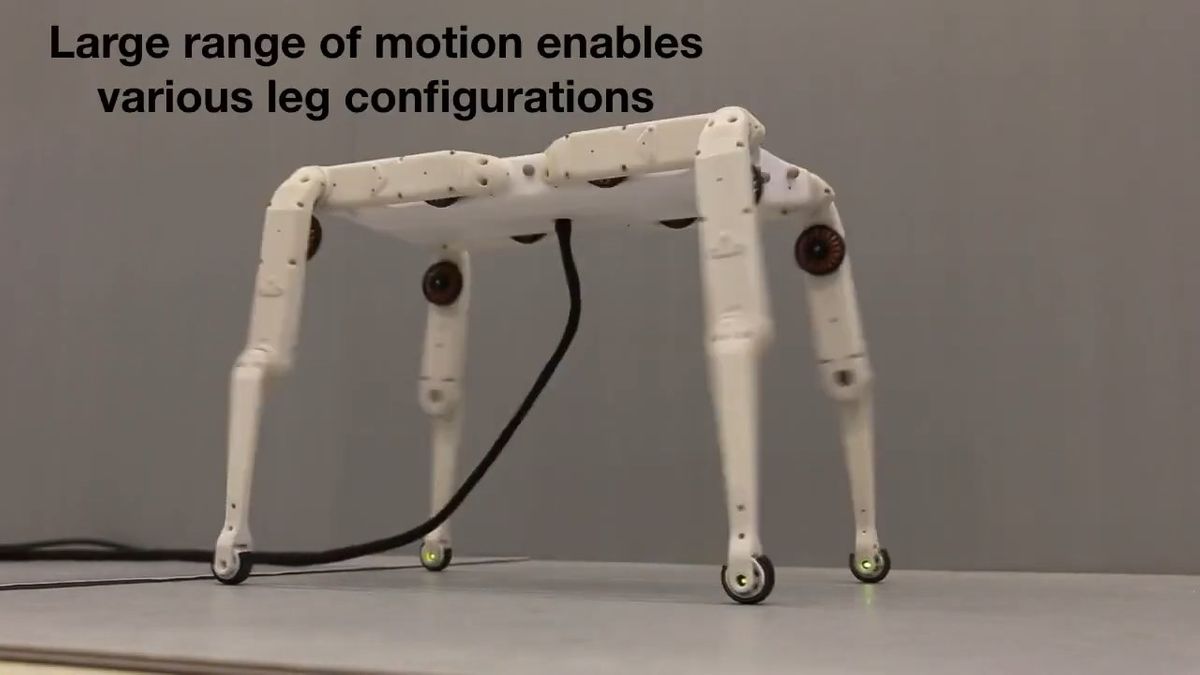
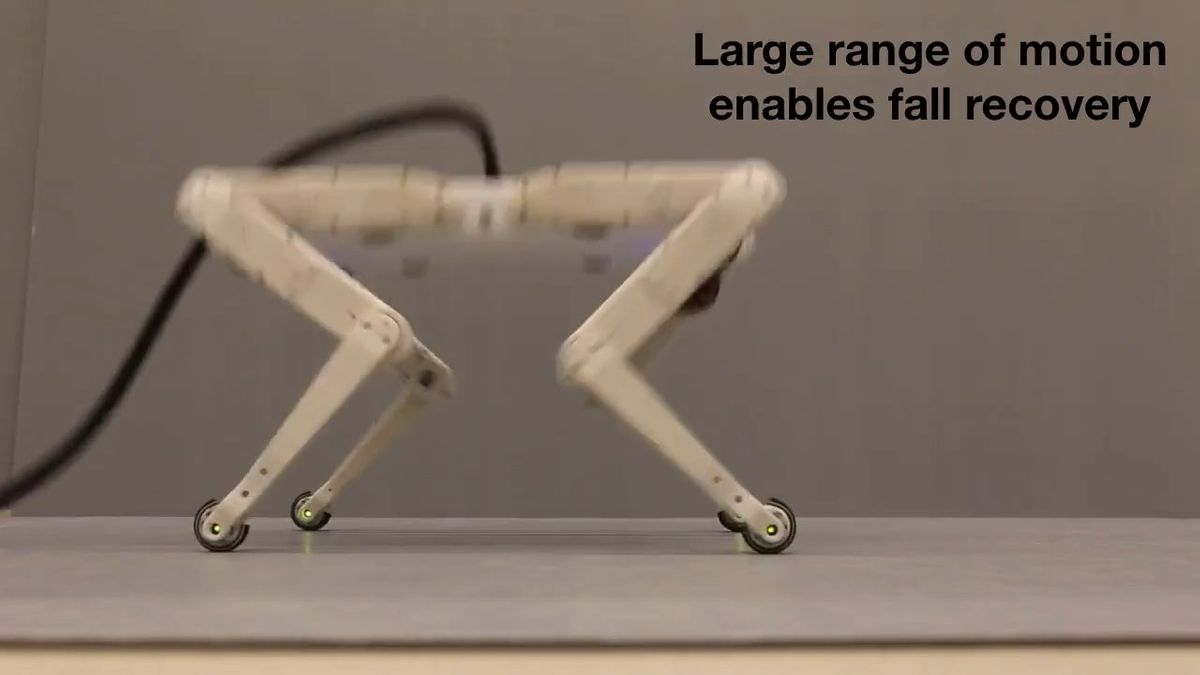
It is possible to stand upright smoothly.
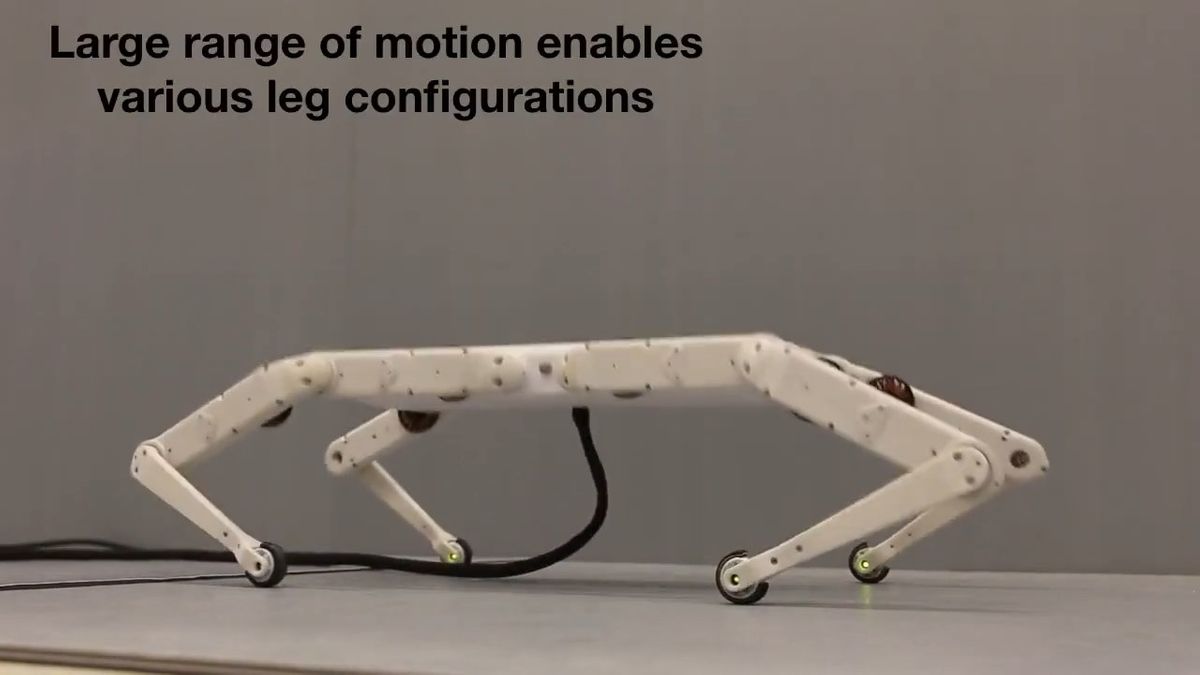
In addition, it is possible to bend the joint to the opposite side and crouch with the same movement.
Defeat it on purpose ...
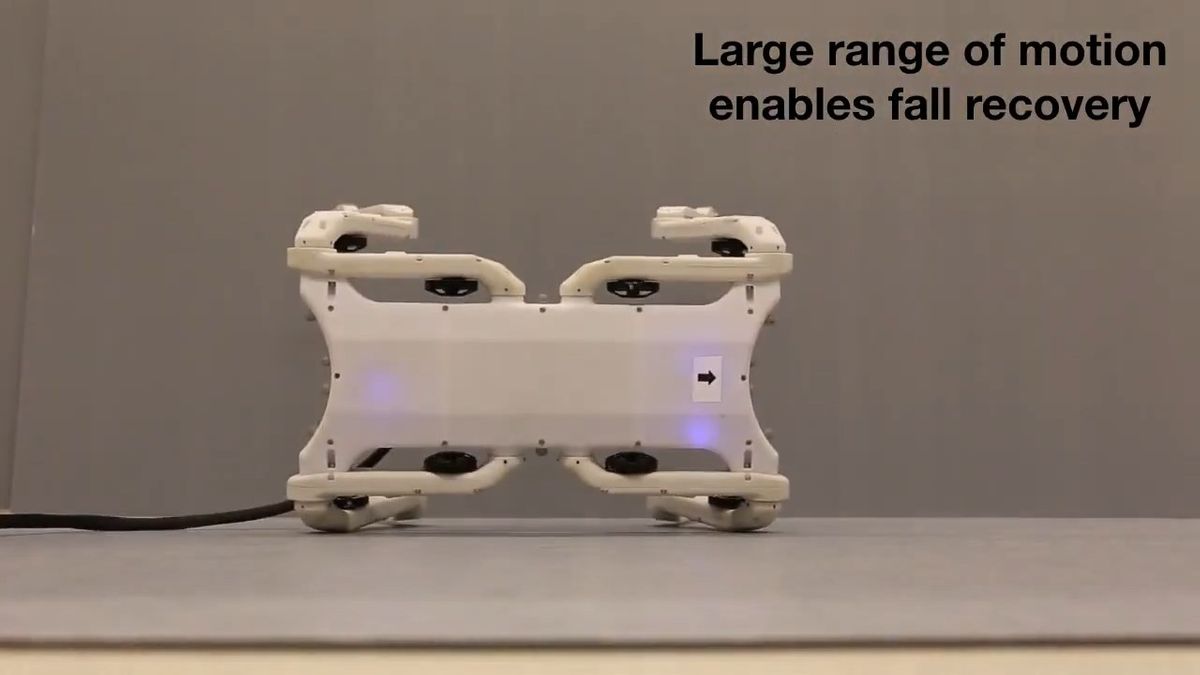
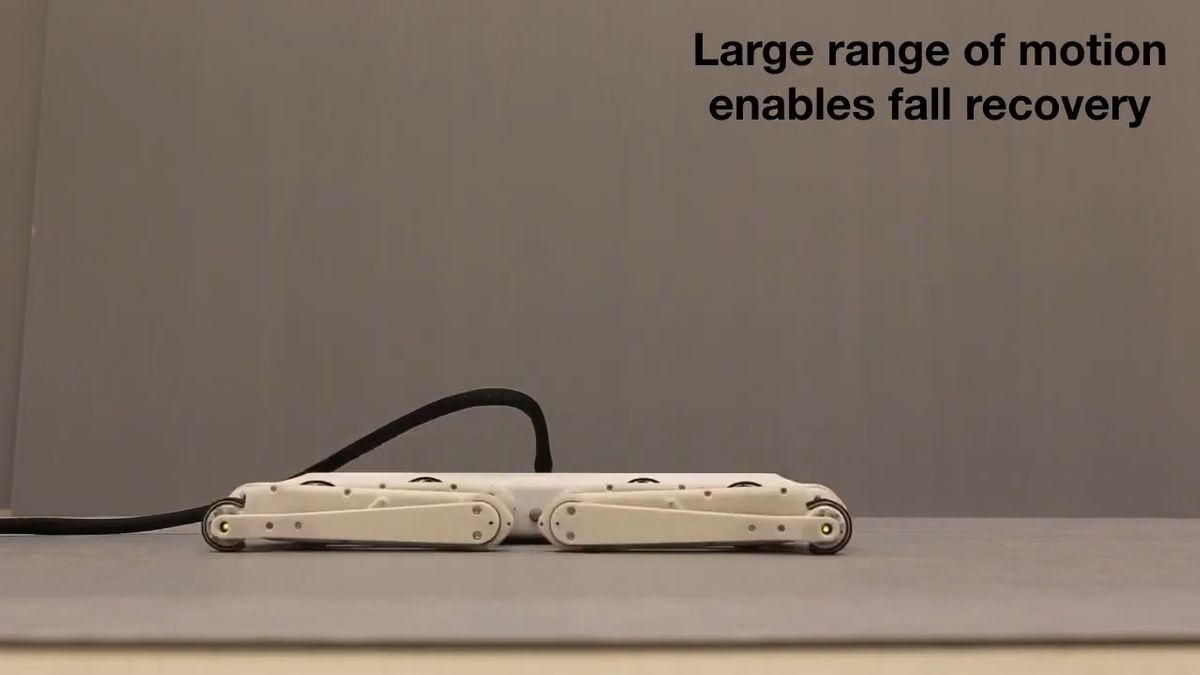
Leave it upside down.
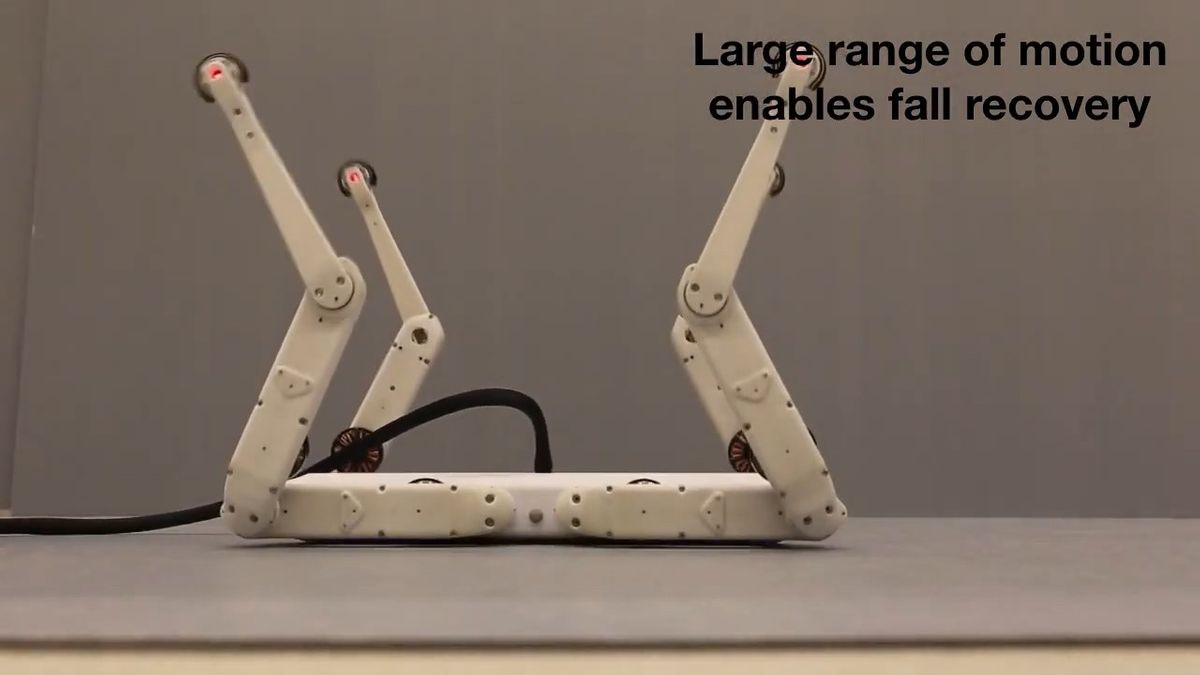
Fold your legs from this state ...
You can also stand up without flipping.
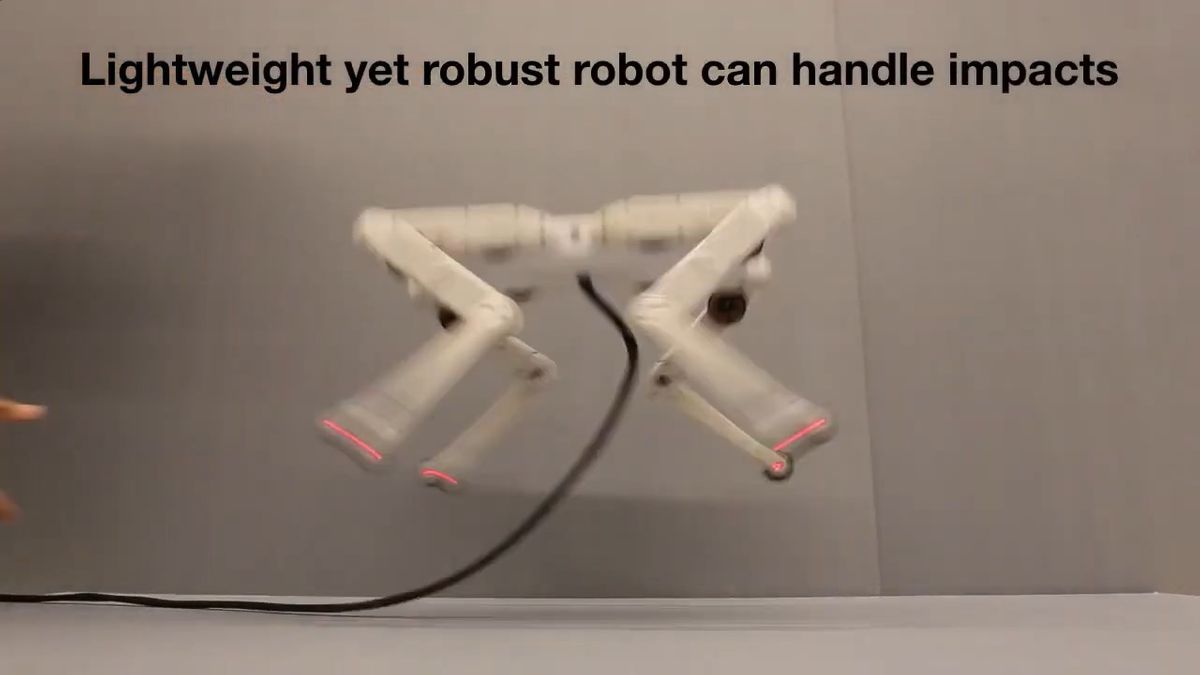
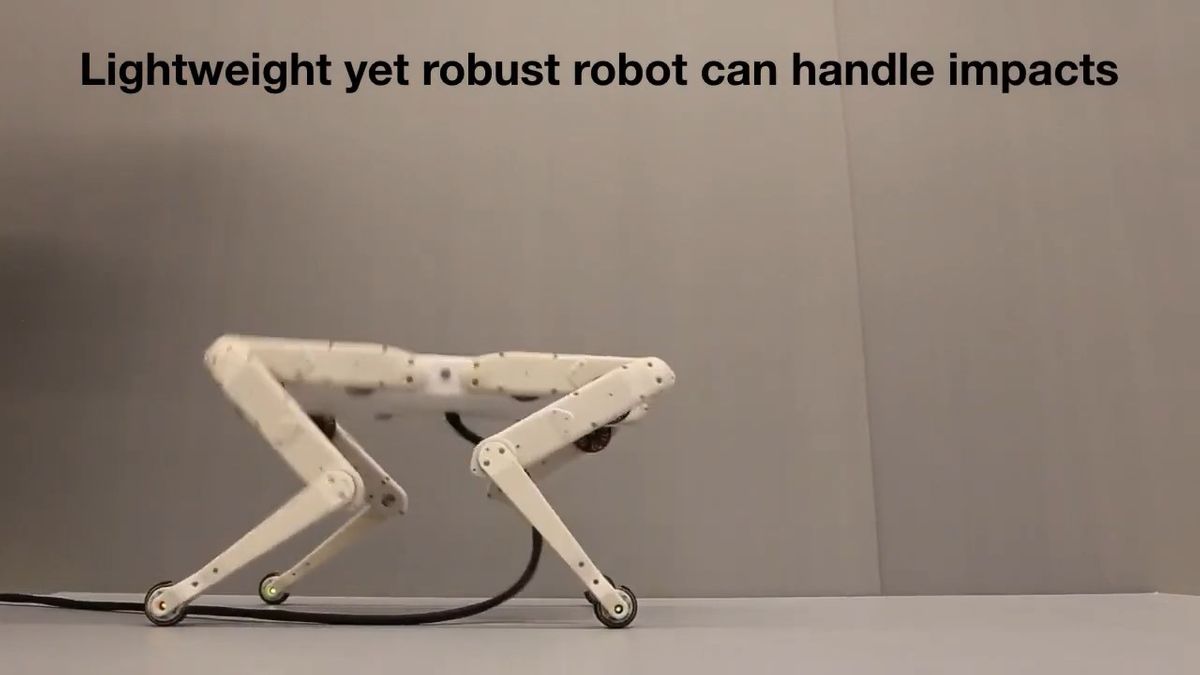
Also, because the robot is extremely lightweight and sturdy ...
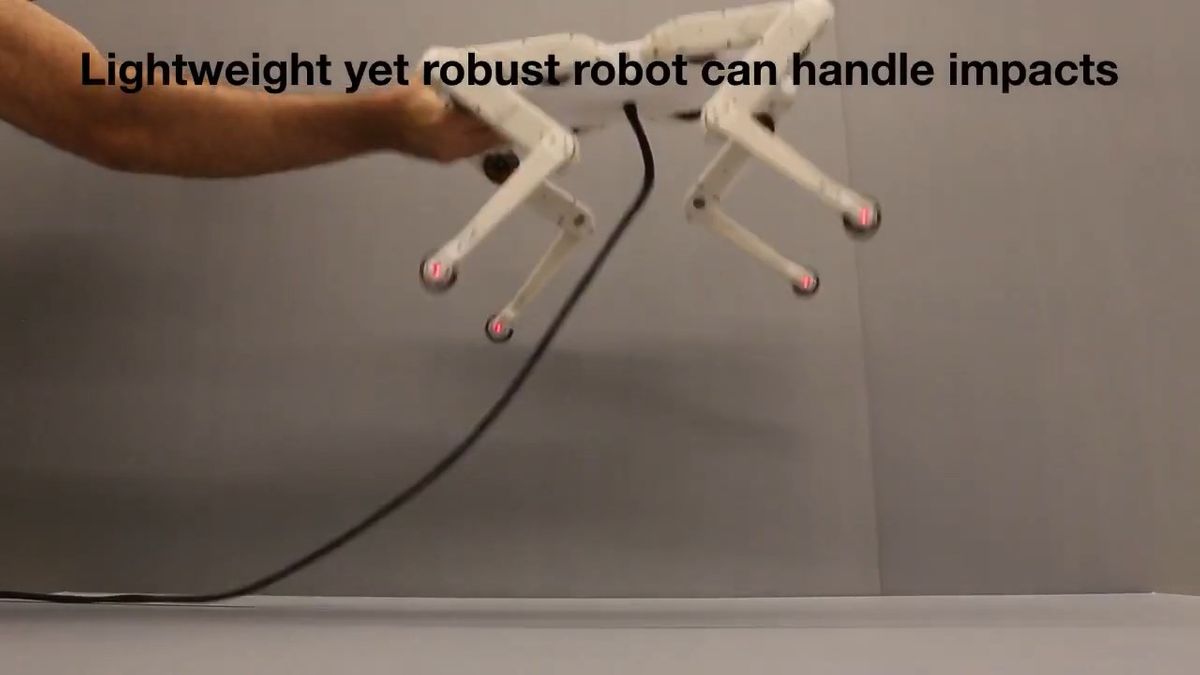
It will not break even if dropped roughly.
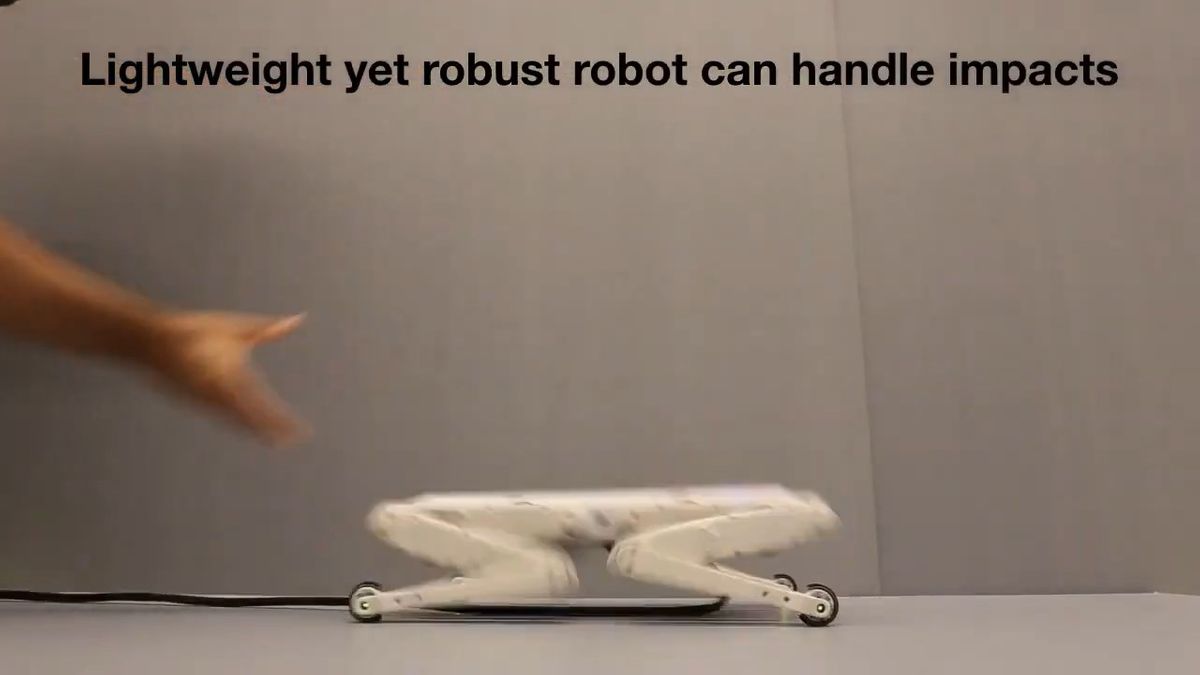
Even if the impact is enough to bounce, it is possible to absorb the impact with four legs. Reinforcement learning to perform such durability tests and vigorous movements is too dangerous to use a high-cost robot, but it is relatively easy to experiment with a quadruped walking robot that can be built at low cost.
Even if you push it with a stick from above ...
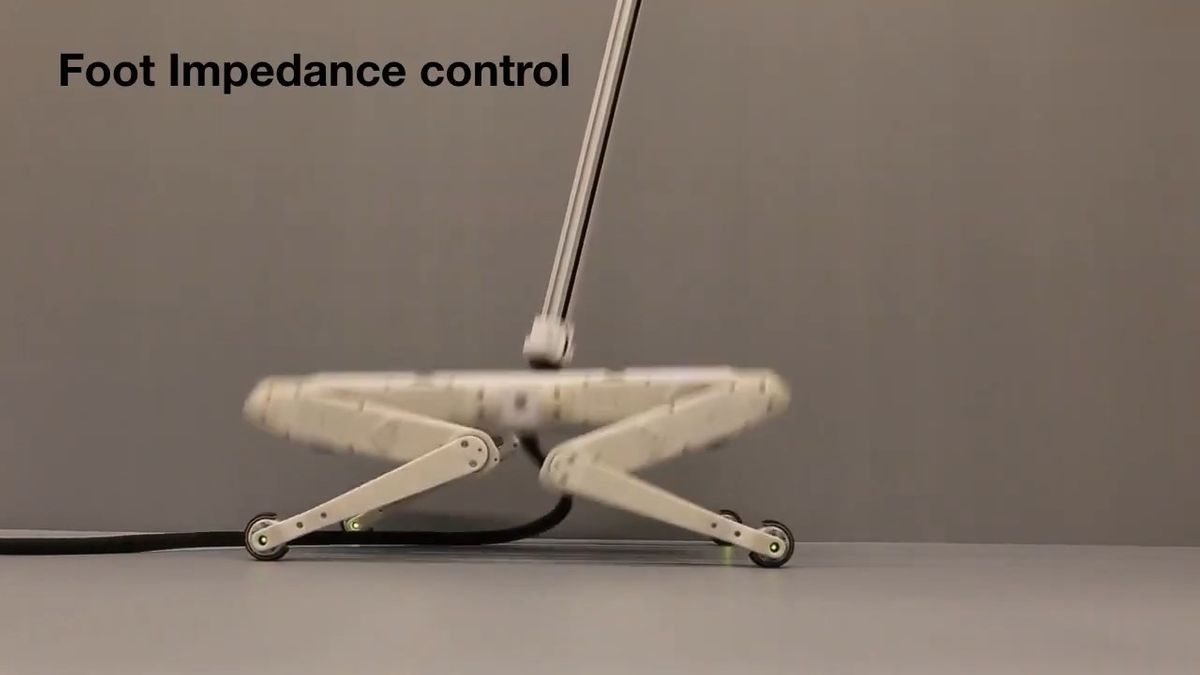
You can stabilize your posture.
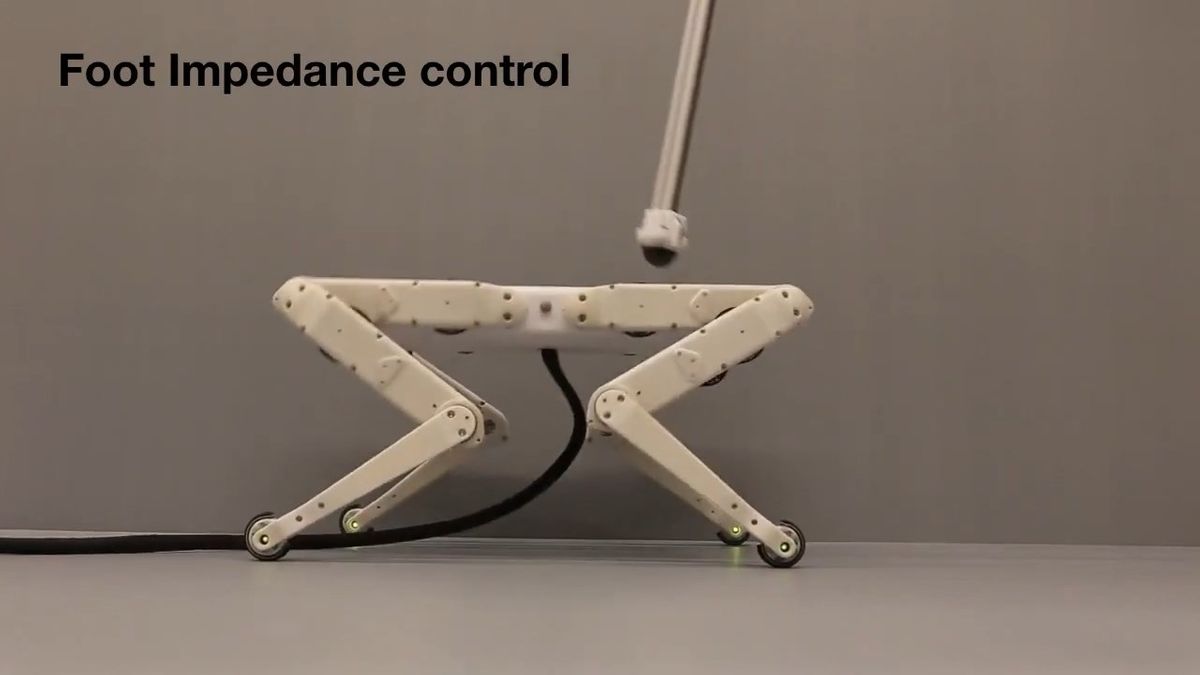
Advanced attitude control software has also been developed to keep the torso level.
In addition, bend your legs on the spot ...
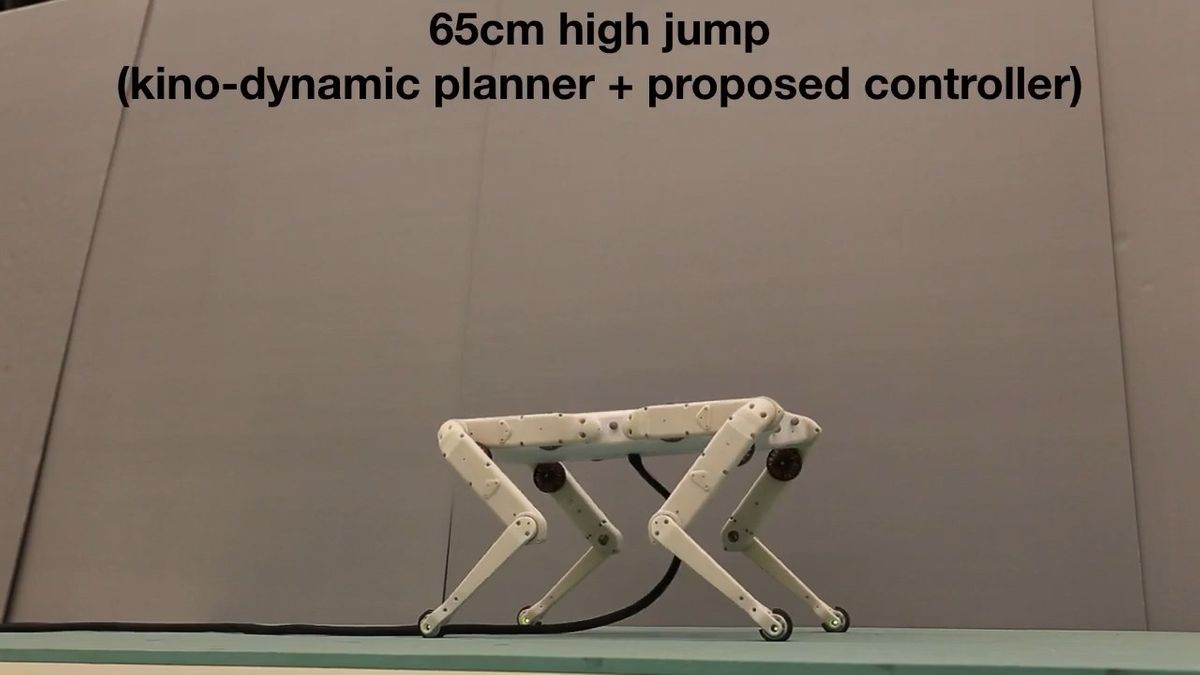
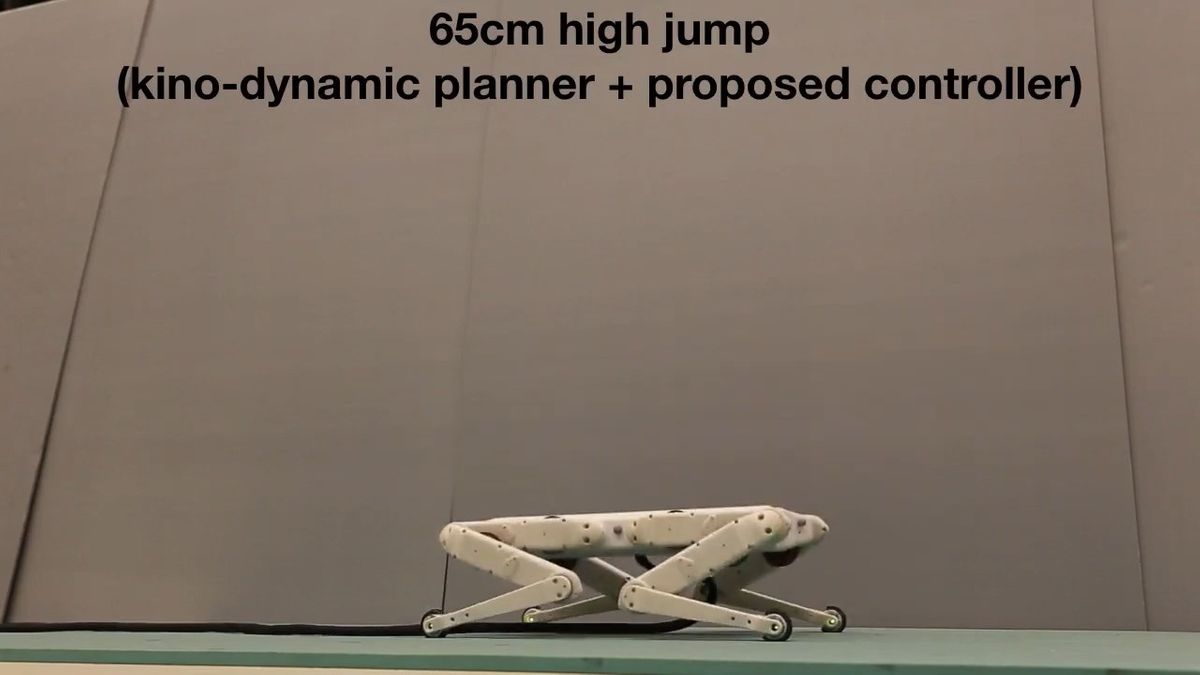
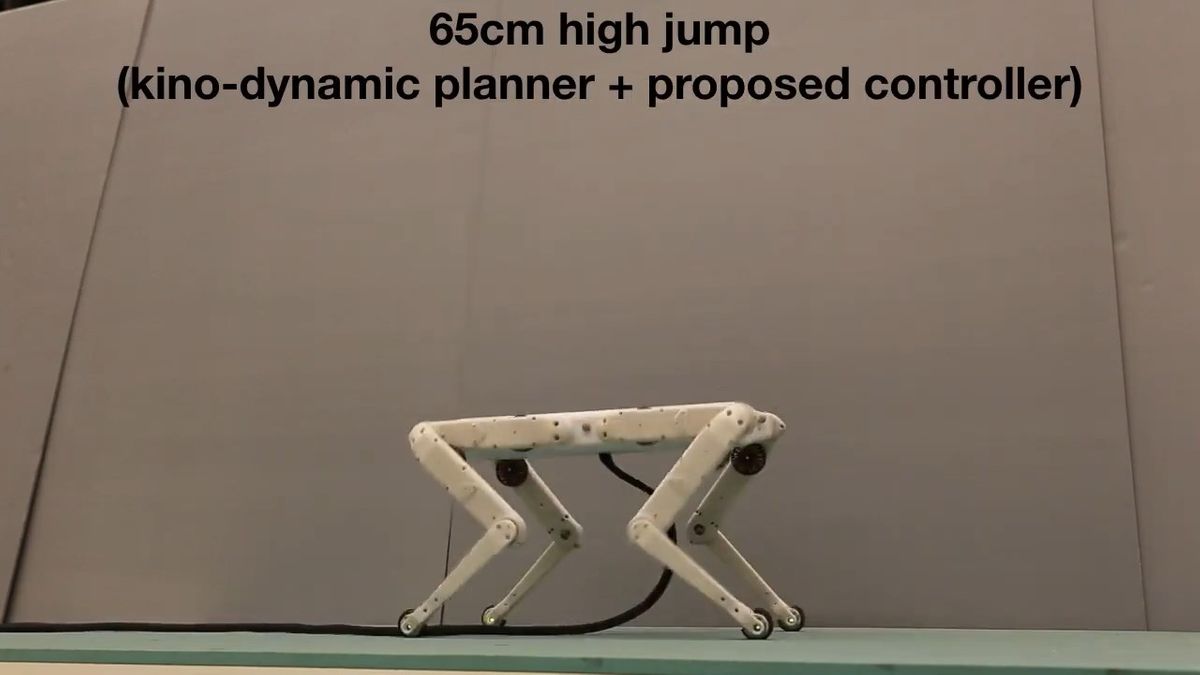
It is also possible to jump vertically vigorously. It seems that it can jump up to 65 cm.
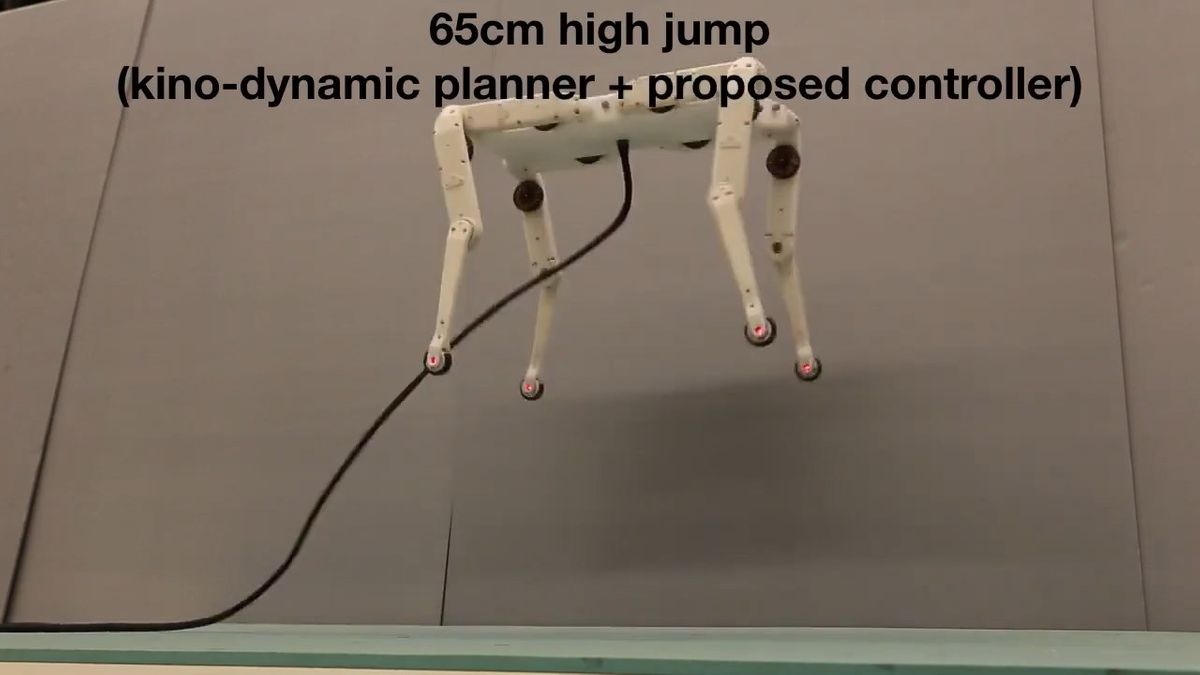
There is no problem with landing.
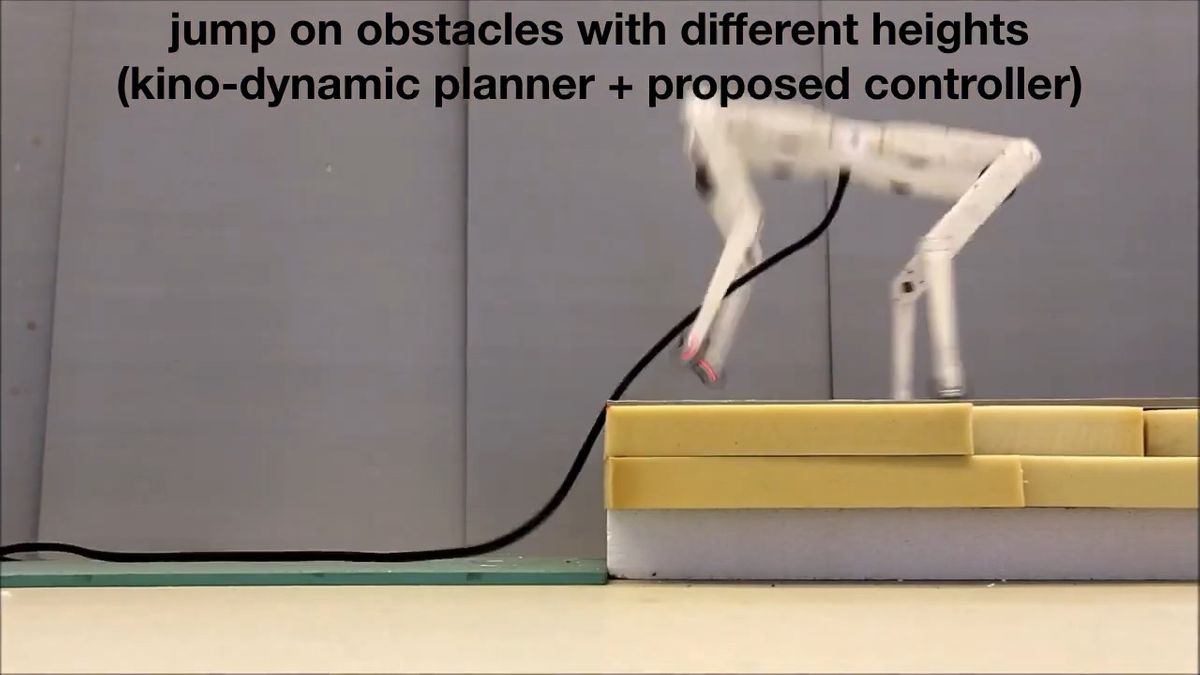
Jump towards the step in front of you ...
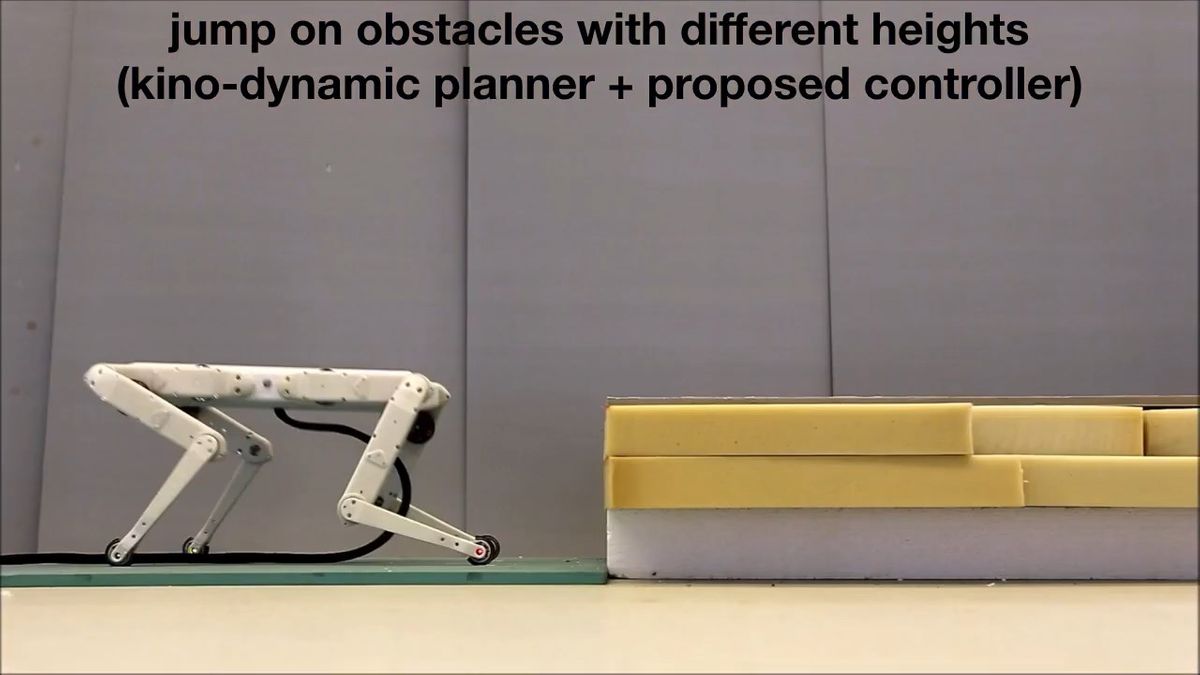
You can also jump on it.
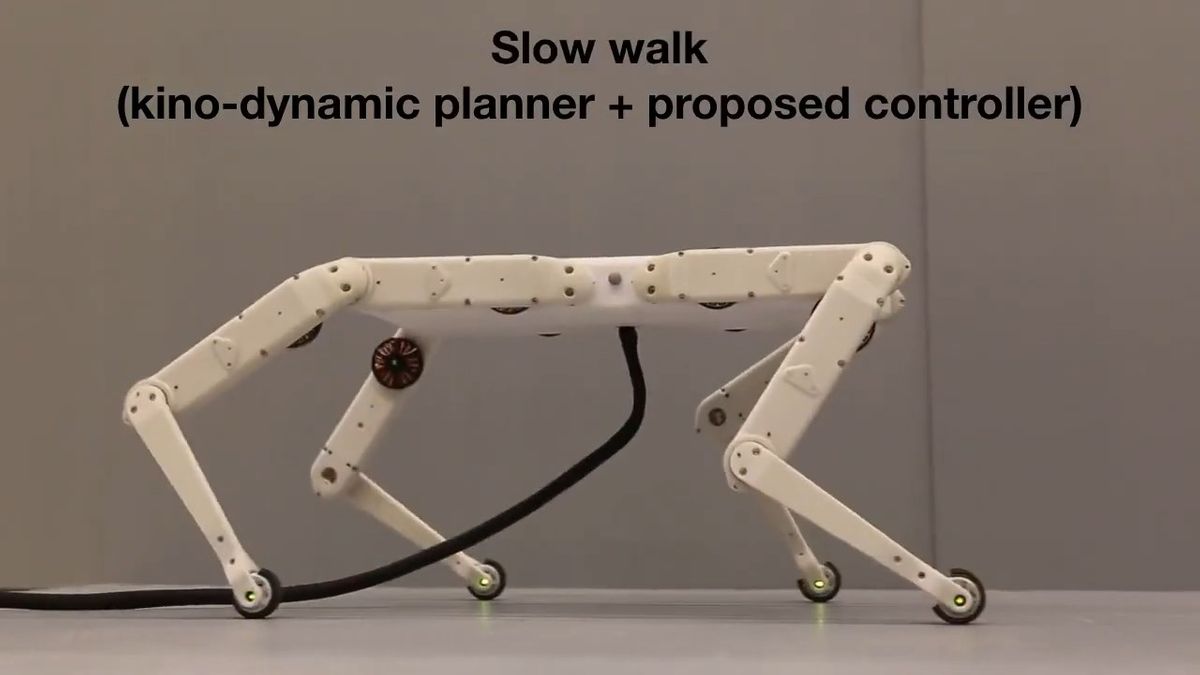
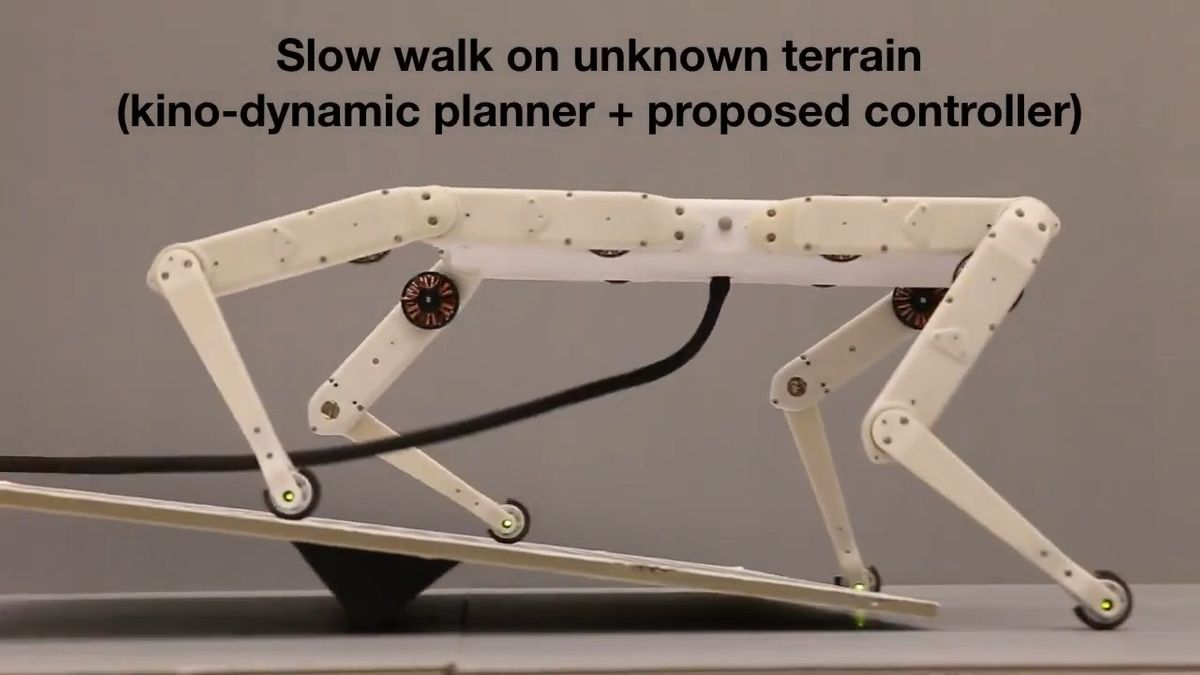
It is also possible to walk at various speeds.
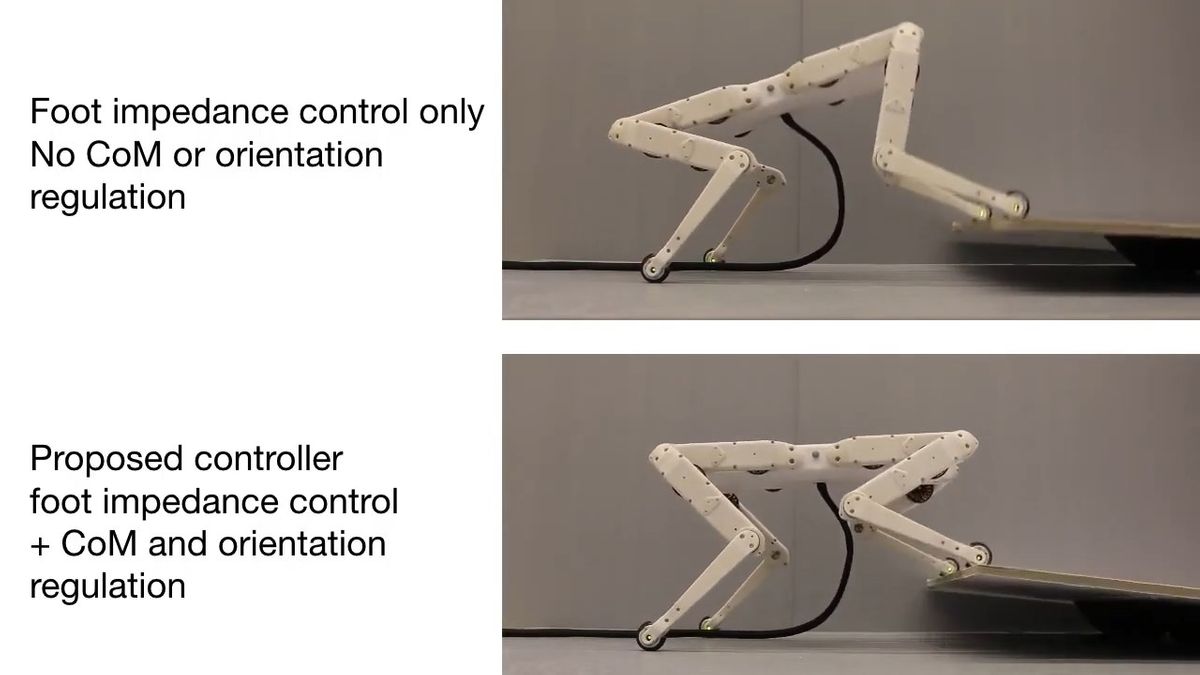
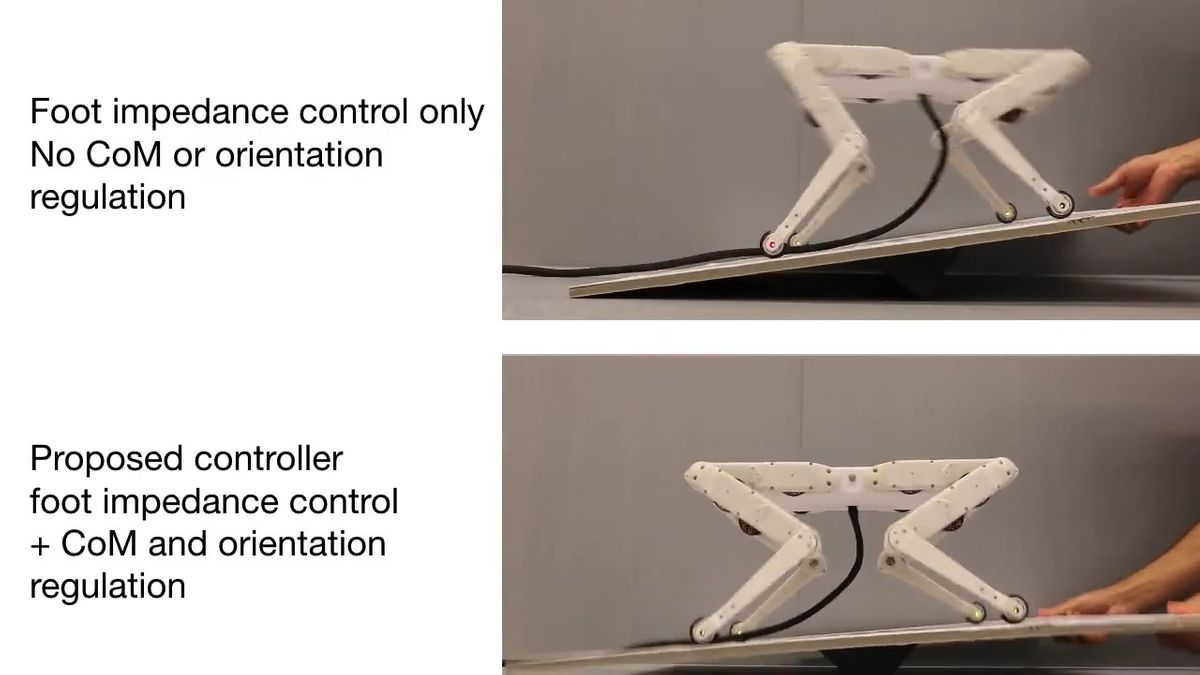
Go up the slope ...
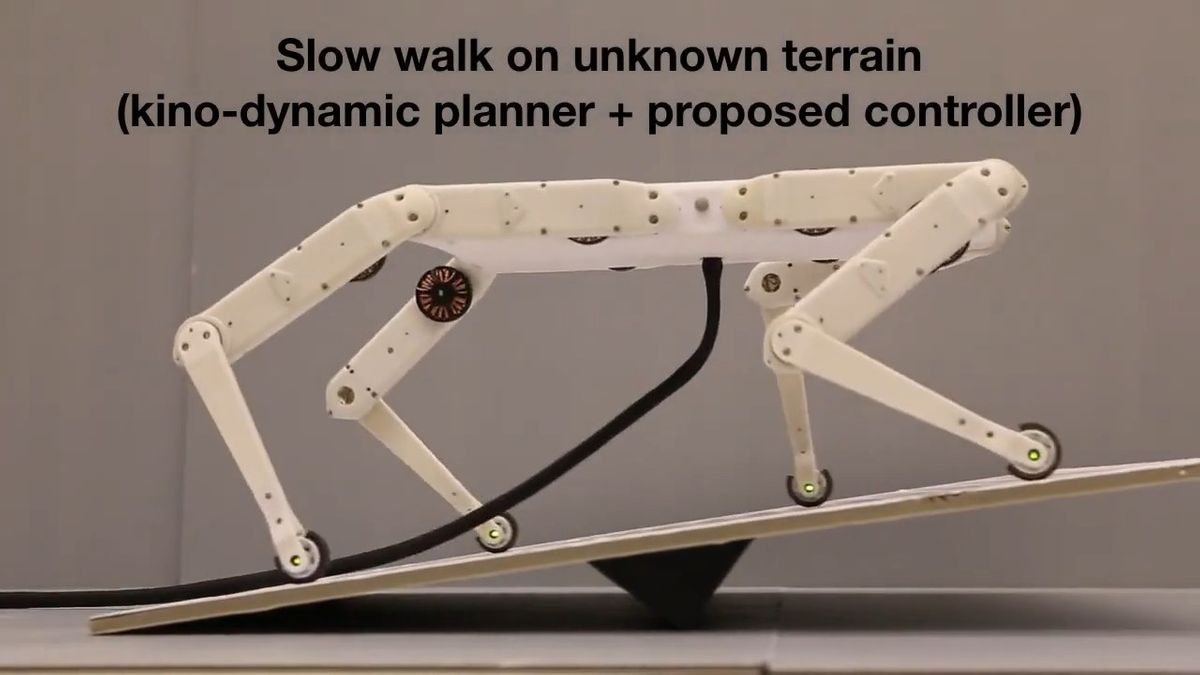
Even if the direction of the gradient changed on the way, I was able to handle it.
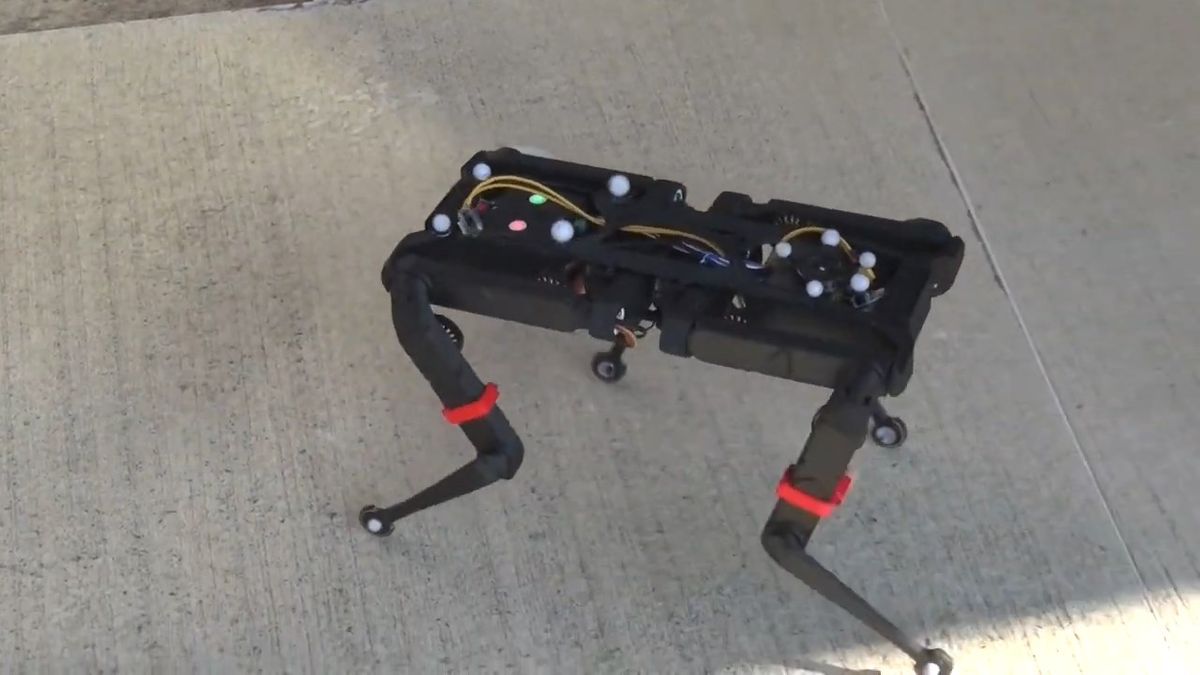
In addition, the latest version of 'Solo 12' is also equipped with a battery and wireless communication device, enabling remote control via Wi-Fi.
Solo 12 stands up from its folded state.

Start stepping on the spot ...

I started walking.
The direction change is also smooth.
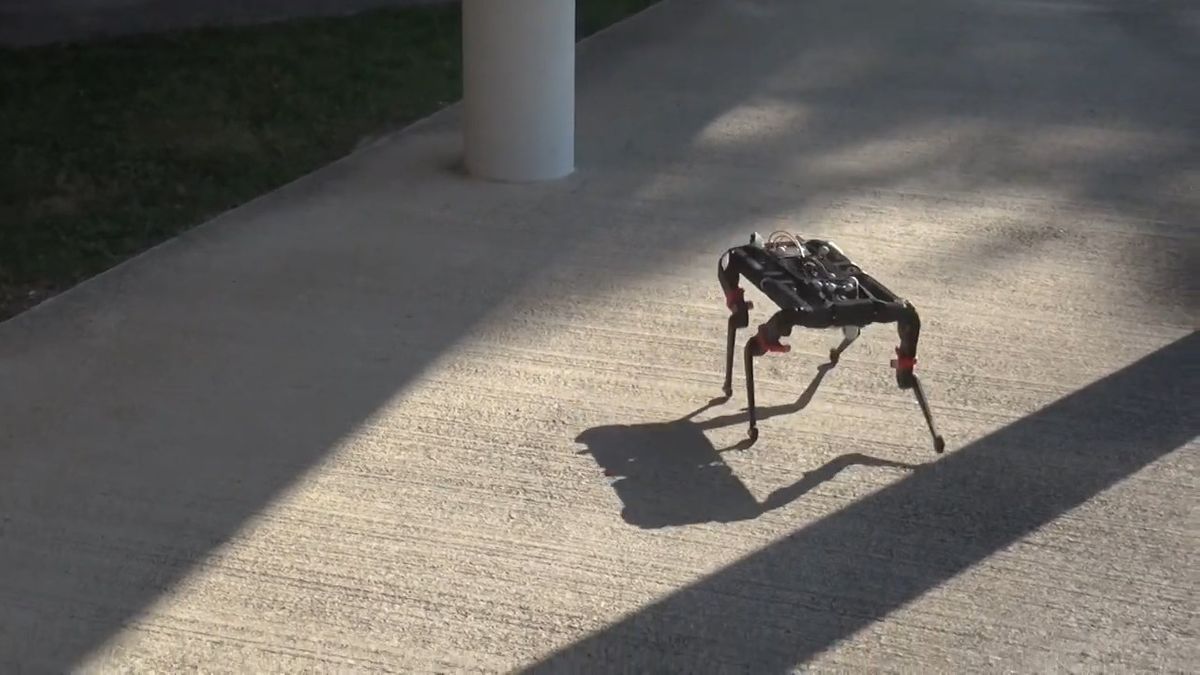
It is possible to walk on unpaved grassland without any problems.

It is said that the main unit and the desktop controller are communicating via Wi-Fi, and the closed loop control of the device is performed by another PC.

At the left edge of the screen, I saw a man holding an object that looked like a controller.

Solo12 can be operated as long as the Wi-Fi signal reaches, but ...

When the radio waves stopped reaching, I suddenly collapsed on the spot.

The communication range is about 30m.

All hardware drawings and software developed by the Open Dynamic Robot Initiative are open source and can be found on GitHub. Since the main parts can also be manufactured with a 3D printer, it is possible to easily make a quadruped walking robot at other laboratories.
Related Posts:







