A robot that stabilizes its posture and lands in the air like a cat even if it is thrown
Robots are effective in exploring places that are too dangerous for humans, such as burning buildings and collapsed tunnels. In order to improve the ability to traverse rough terrain required of such robots, a robot with the ability to disperse the impact when falling by landing on all fours like a cat was born.
Throwable Robot Car Always Lands on Four Wheels --IEEE Spectrum
Cat-like robot lands on all fours when thrown
https://newatlas.com/robotics/agro-robot-lands-four-wheels/
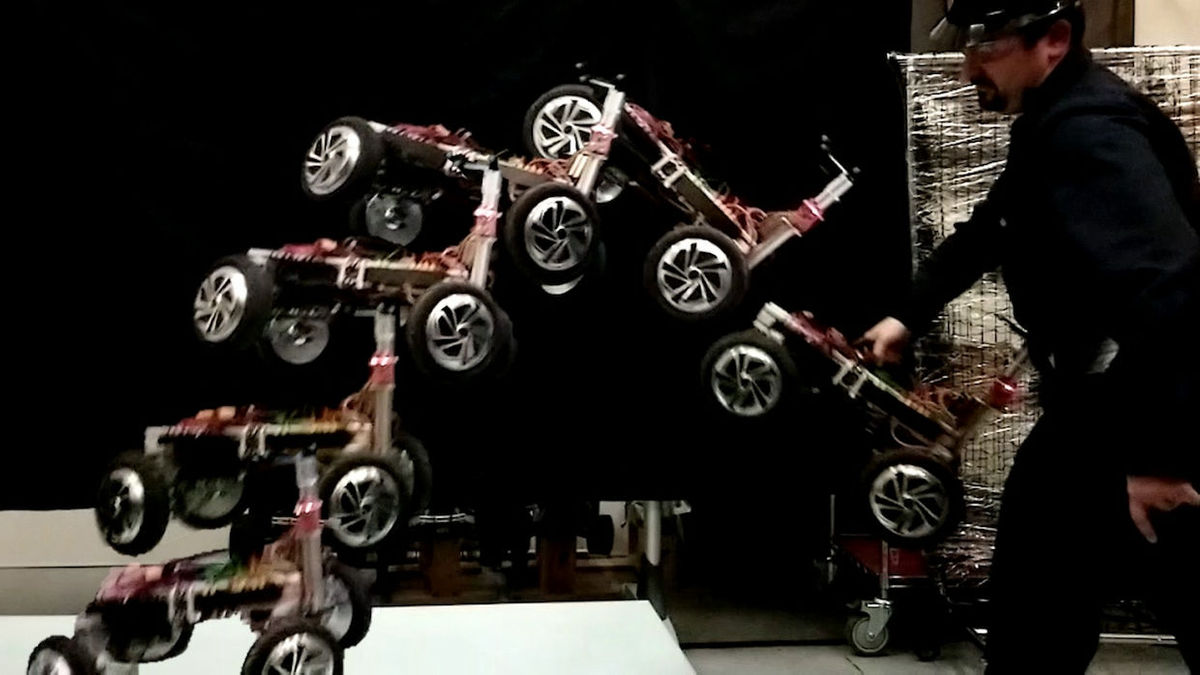
Below is a video of the 'Agile Ground Robot (AGRO)' robot, which has the ability to land like a cat, developed by the Robotics Research Center of the United States Army Academy.
Dynamics and Aerial Attitude Control for Rapid Emergency Deployment of the Agile Ground Robot AGRO --YouTube
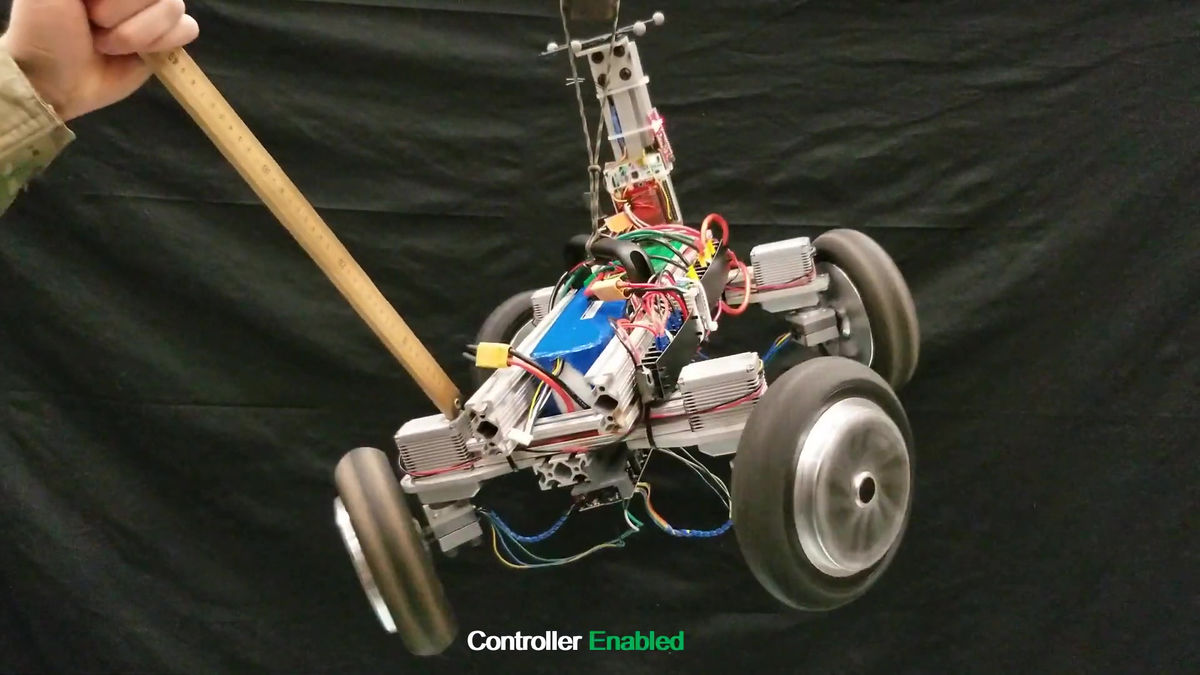
The AGRO that appears in the movie is in the prototype stage, so the internal parts are exposed.

The feature of AGRO is the legs. The in-wheel motor can control the front-back, left-right, and up-down axis rotation of the wheels. You can also turn it almost at a right angle by rotating the wheels 90 degrees.

When the controller is enabled, if it is thrown and the car body tilts in the air ...
The built-in inertial measurement unit instantly detects a fall. By tilting the wheels inward by 45 degrees and rotating the wheels located diagonally in the same direction, torque is generated and the vehicle body is kept horizontal.
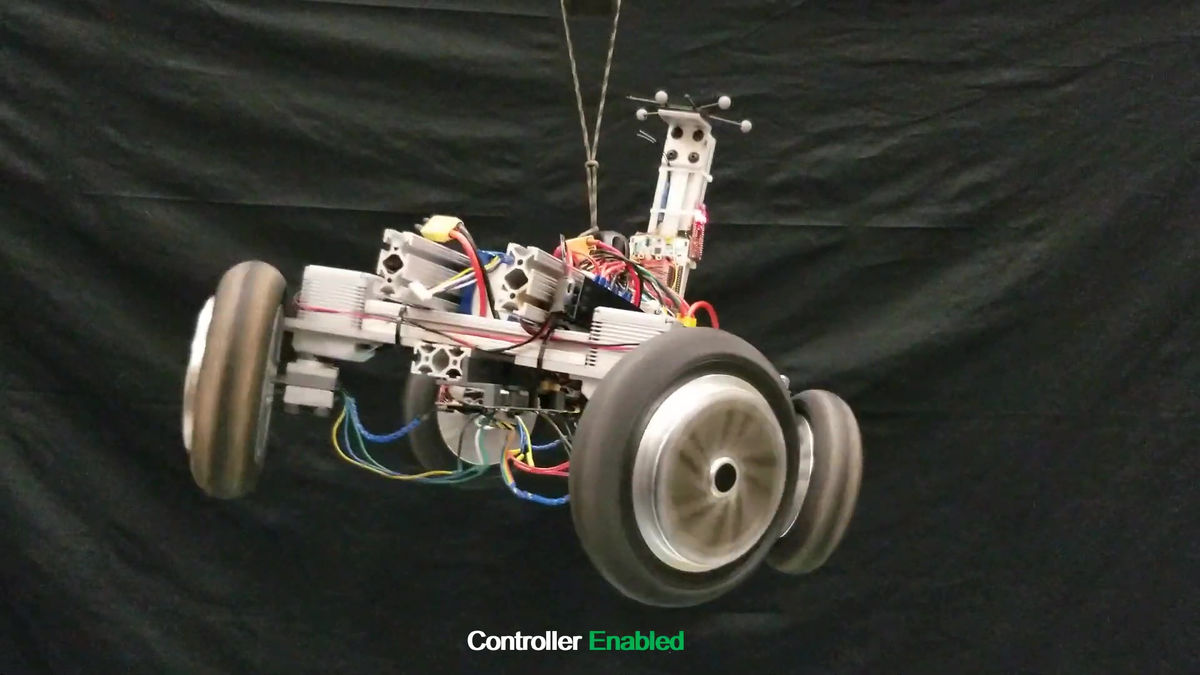
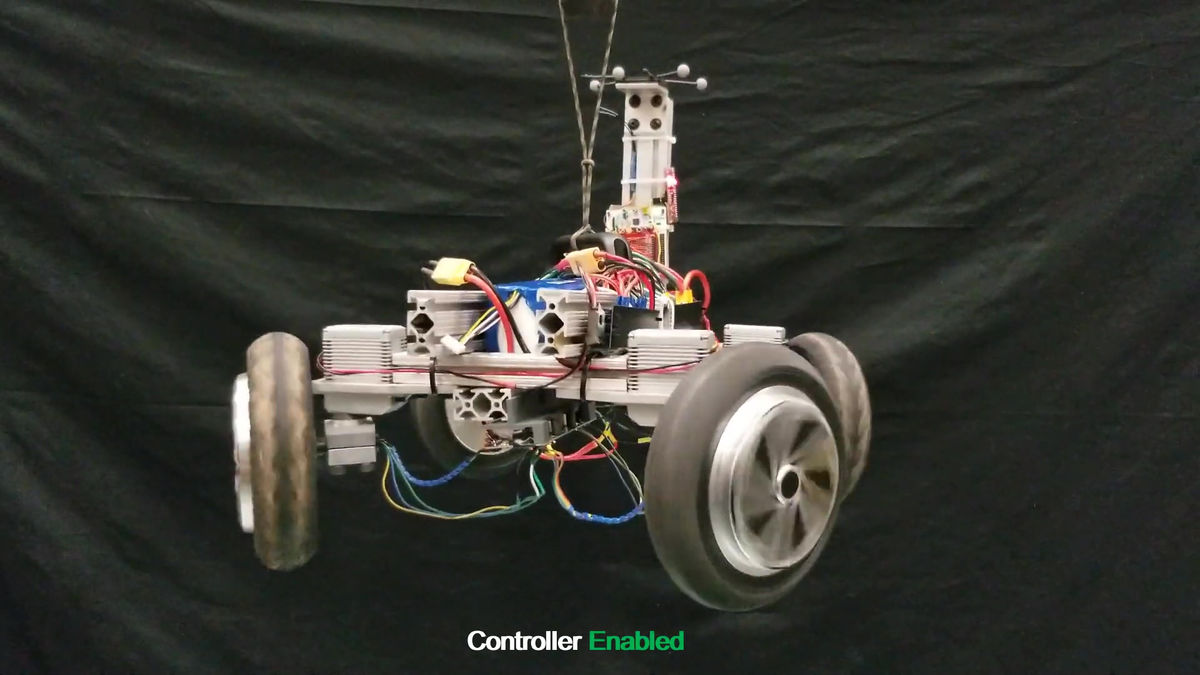
With this torque, AGRO lands so that all four wheels are perpendicular to the ground, so the impact at the time of landing is evenly distributed and the impact itself is reduced by 20%. In addition, if the rotation speed is within 66 rpm, you can recover your posture, so if you have enough height, the probability of falling sideways or upside down will be zero.
According to Daniel J. Gonzalez, the lead author of AGRO's paper, in theory AGRO can rotate 22.5 degrees left and right and back and forth in 250 milliseconds, and if you control the angle of each wheel in real time, it will be further. It seems that there is a possibility that improvement can be achieved. IEEE SPECTRUM, the journal of the Institute of Electrical and Electronics Engineers, states that it is 'potentially effective for robots with wheels used in the air' and is useful for robots operated on ramps and steps, and robots that fall from aircraft. Pointed out. He added that controlling the rotation during the drop could help prevent the parachute straps from getting entangled, which could be useful when dropping a military vehicle from the air.
Related Posts: