I've been watching the testing of the lunar exploration vehicle of the Japanese team "HAKUTO" aiming for victory with the first "lunar exploration race" of humanity
A contest competing for the first monthly unmanned exploration by the private sponsored by GoogleGoogle Lunar XPRIZESo, the only team from Japan "HAKUTO"Participate in the development aiming for" the first moon ". On September 27, 2016 (Tuesday), a public test was invited to the press at the Tottori Sengoku prefecture's Tottori prefecture, so we will take a firm look at what kind of aircraft and how it will move did.
HAKUTO
https://team-hakuto.jp/
Au × HAKUTO MOON CHALLENGE
https://au-hakuto.jp/
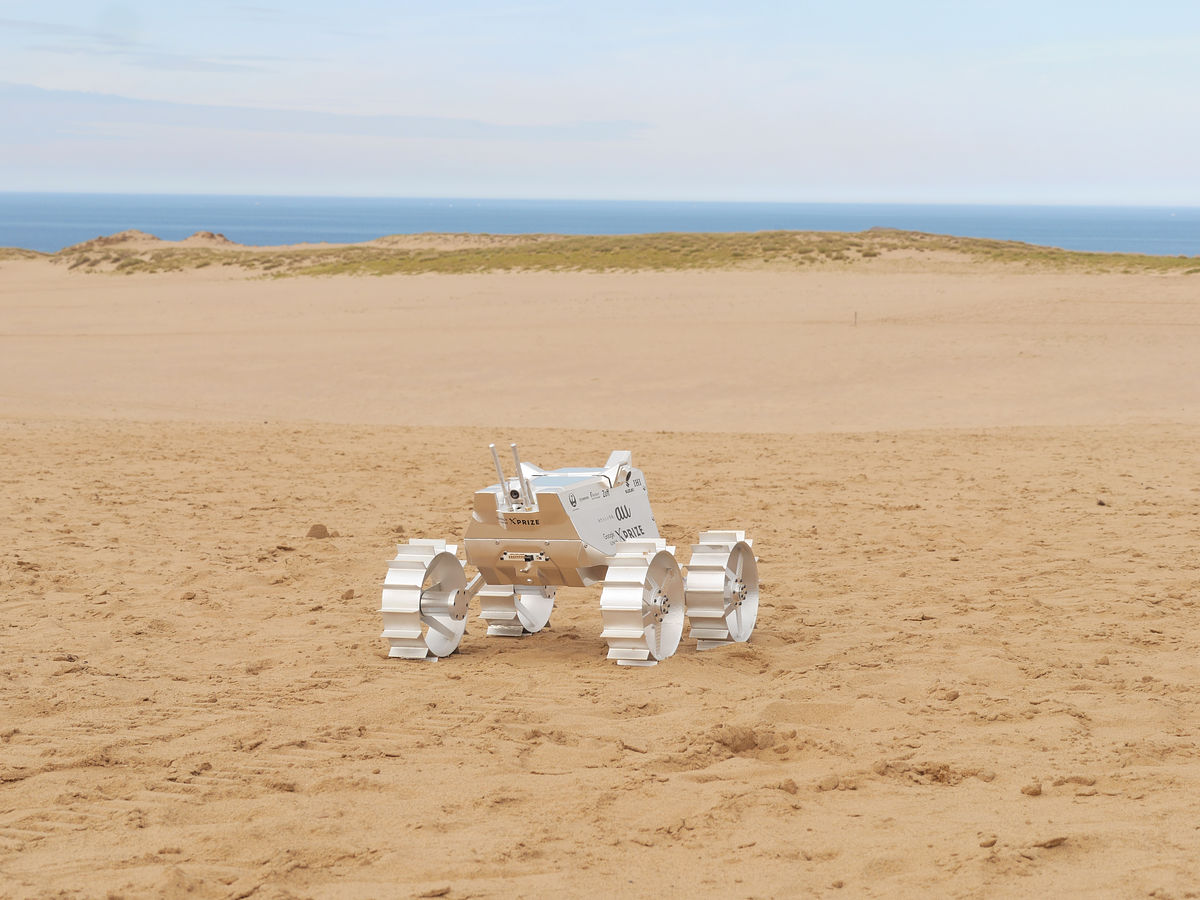
I came to the Tottori Sand Dunes in fine weather at the venue for open examination. Although it is supposed to actually run a spacecraft, it was a place where it stopped when it rained, so this day was better than a great test run.

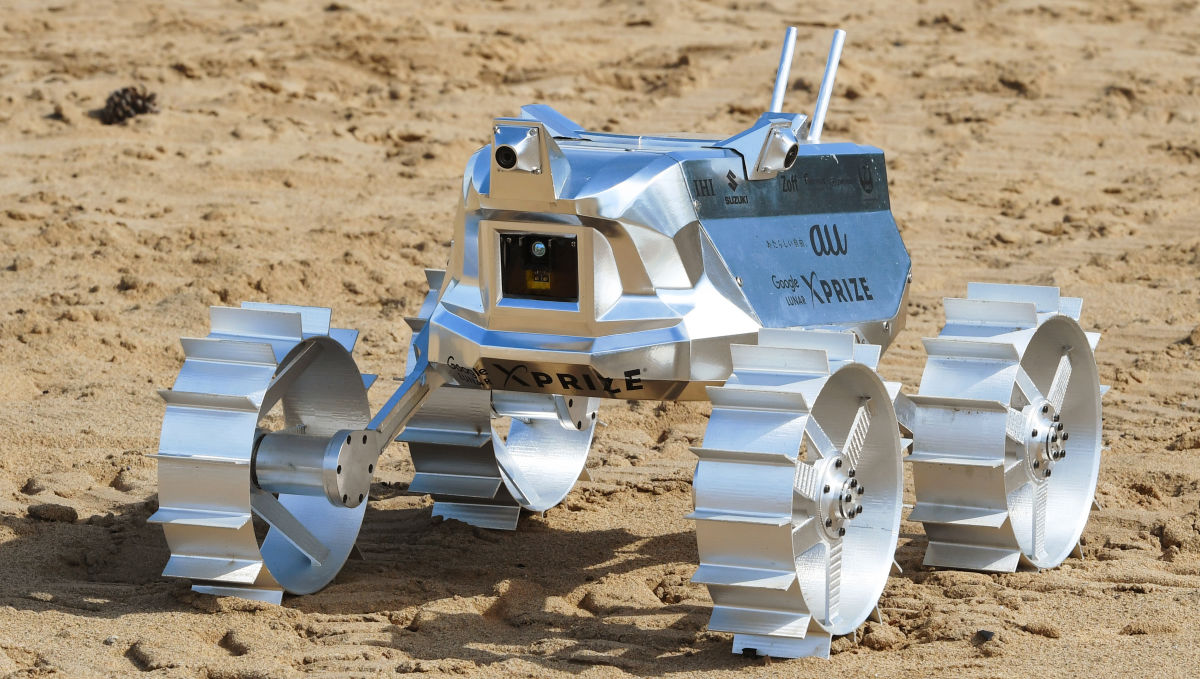
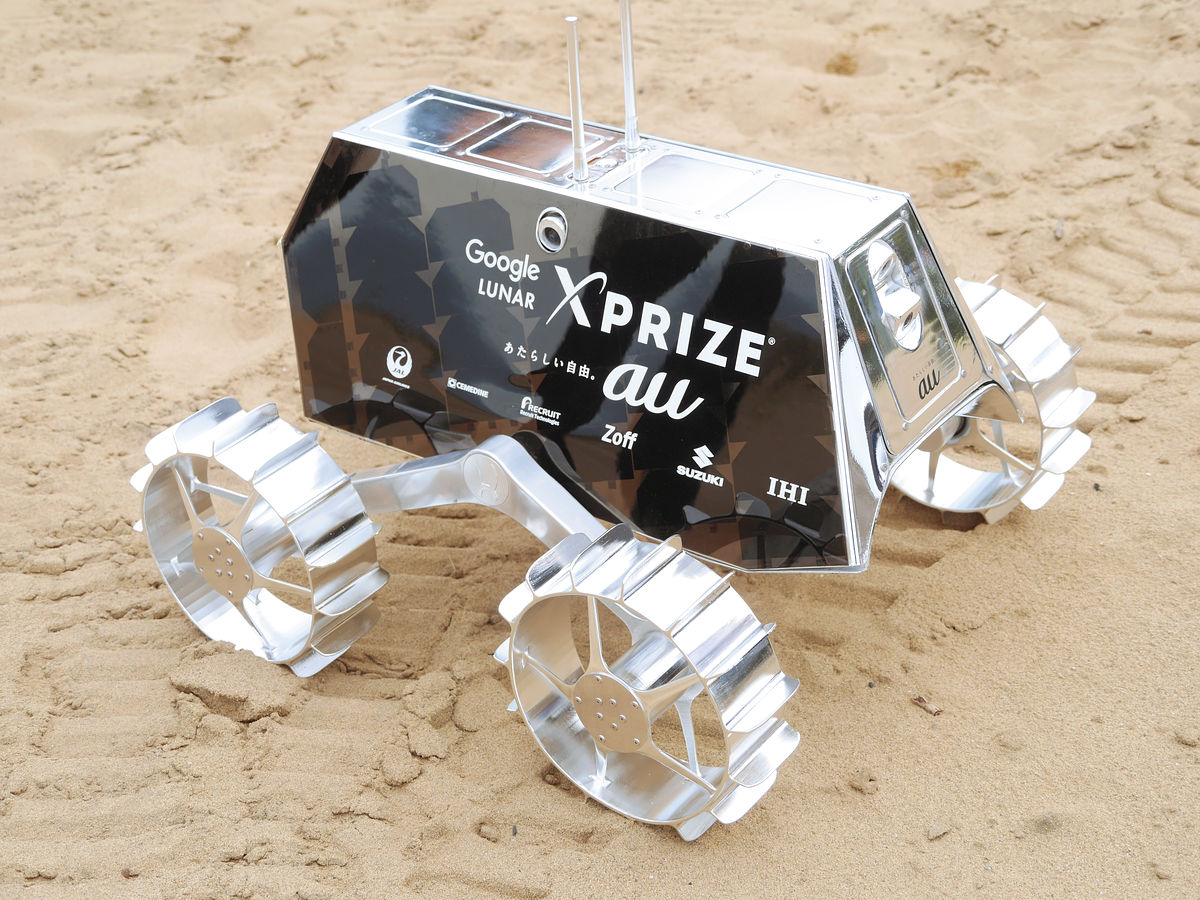
One of the two aircraft released on the day, "HAKUTO Rover (Rover)" ofPreflight model 3. This aircraft was prototyped in order to carry out demonstration experiments, basically incorporating the equipment and software used in the production basically as it is. By using this aircraft and using Tottori sand dune as a lunar surface, we evaluated the performance of the camera, evaluated the performance of "ToF sensor" which measures the distance to the object using infrared rays, and imitated communication with the earth Three communication tests are to be carried out.

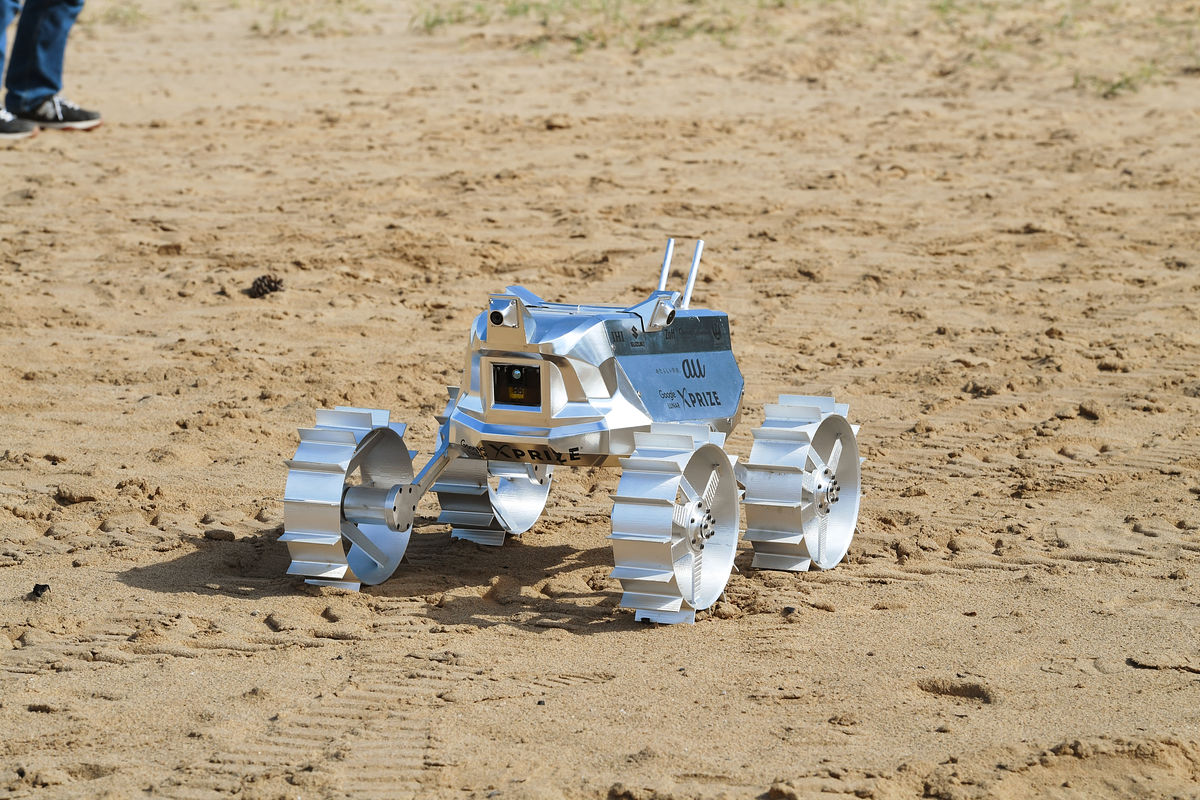
It seems like this is how Rover is actually running. While letting the claws of the wheel digest into the sand, you can see how you move slowly and change direction.
A test of the lunar surface exploration vehicle of "HAKUTO" aiming for victory at the lunar exploration race "XPRIZE" - YouTube
Looking from the side like this. It is made to advance forward with four wheels made of aluminum scraping grasping smoothly the lunar surface.

Wheel that emphasizes grip force. This wheel is the shape of the prototype, but the same aircraft of the same shape will be used for the production aircraft.
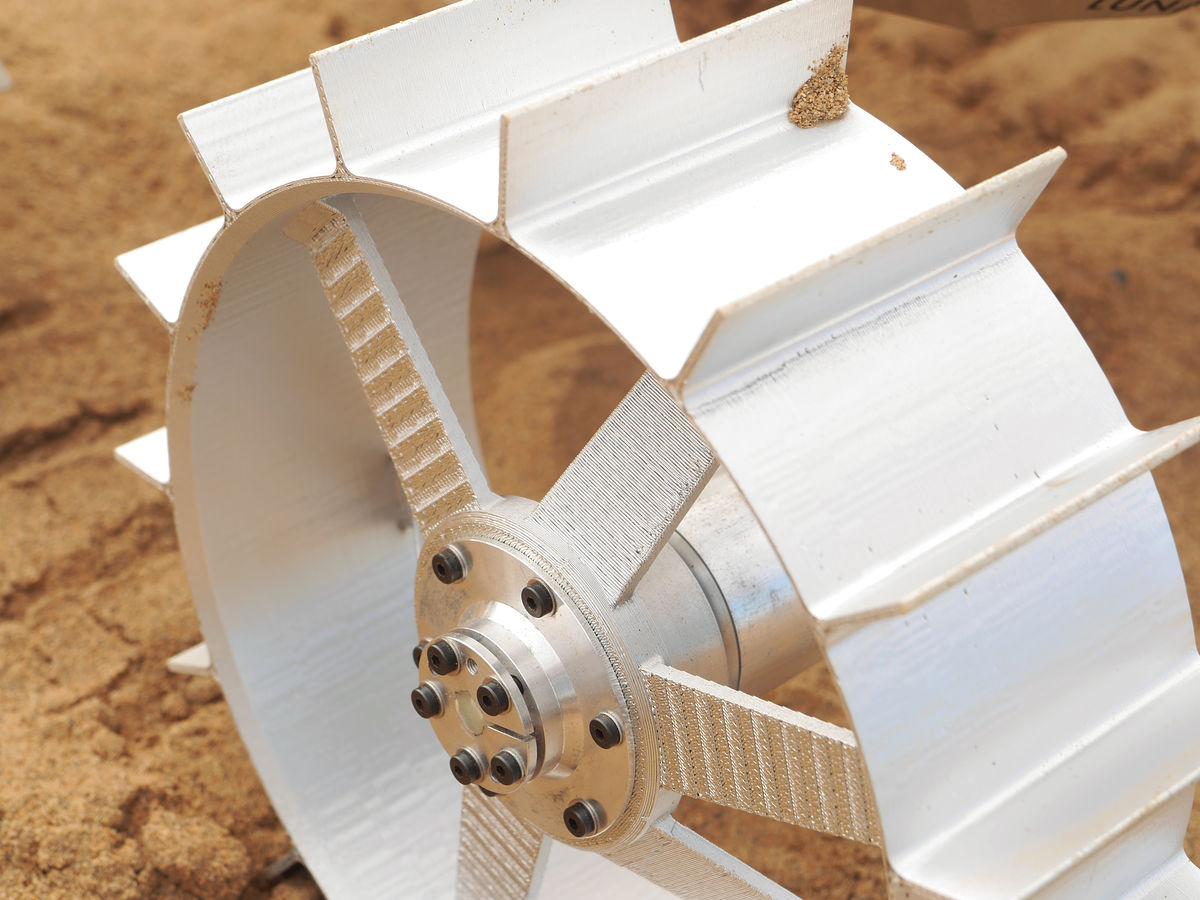
There is sufficient clearance (gap) between the wheel and the axle, so it will not be a problem even if sand enters like this.
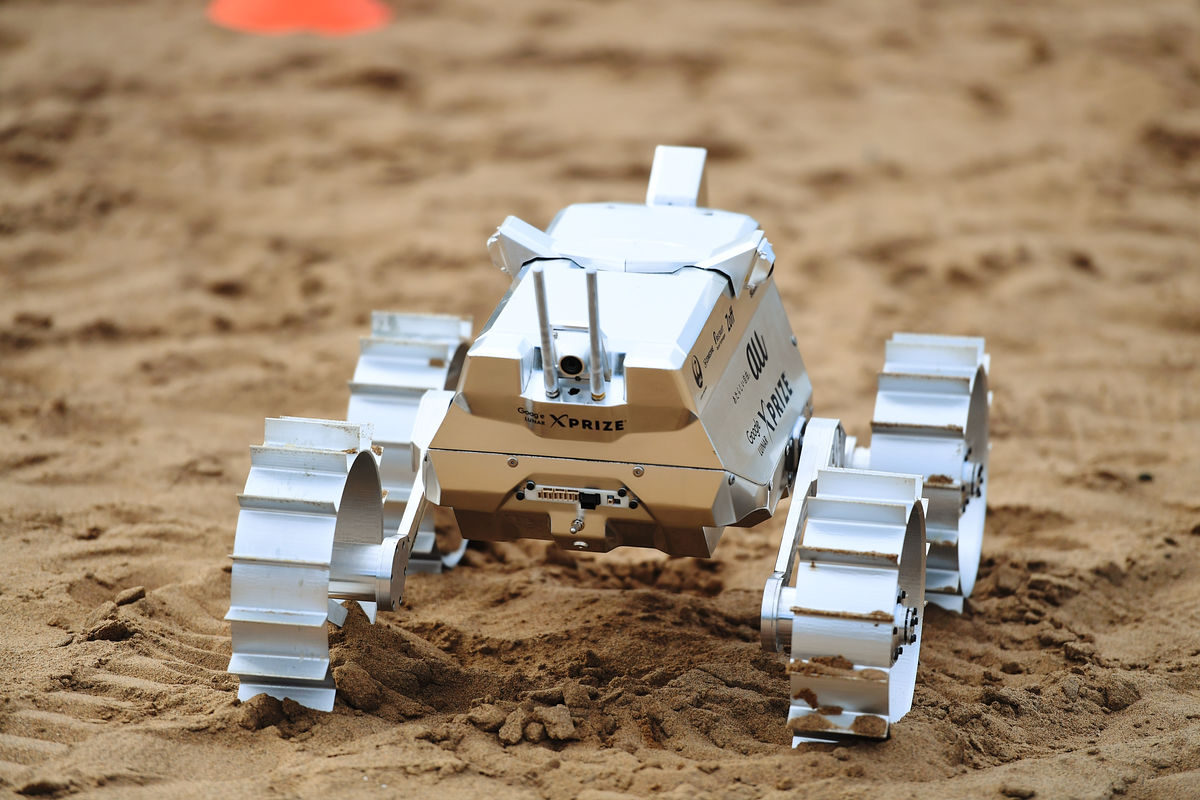
On the front part of the aircraft is equipped with a camera for taking pictures / moving pictures and ToF for measuring the distance between the front obstacle by irradiating infrared rays.

Also equipped with cameras on both left and right sides. By adjusting the rear camera to this, it is possible to see all 360 degrees around the fuselage.

"Hukuto team's participation" Google Lunar XPRIZE "is not a space development agency such as NASA or JAXA, but a competition competing for the development of private robotic explorers. For the mission that is stipulated, we first landed the robot spacecraft on the moon and moved over 500 meters from the landing point. Then you need to send high resolution video and still image data to Earth, and you need to complete these missions in 2017. A prize of 20 million dollars (about 2 billion yen) is given to the team who succeeded in the earliest mission, and the team won the second place is given 5 million dollars (about 500 million yen), the total prize money is 30 million dollars (about 30 It is a tremendous event called Billions of yen).
Google Lunar XPRIZE Home Page
http://lunar.xprize.org/

Hakuto is the only team in Japan who will challenge this first race of the human race, and this is what "Rover" is developed for that. By the way, we need to arrange rocket etc on our own side, but it is impossible to undertake original development of rocket indeed. As a result, each team has asked a private rocket development company to launch, and at HAKUTO jointly with other teams launched a rover with the SpaceX "Falcon 9" rocket,AstroboticWe are planning to soft landing on the moon with "Griffin", a company landinger (moon landing ship).
Rover communicates with the ground via the lunar landing ship "Lander" and exchanges moving image data and maneuvers. At the test site, "ground stations" that operate on the ground are installed and various equipment are lining up.

As a facility for communication, Rover has a communication device based on Wi-Fi radio waves in the 2.4 GHz band and a dedicated protocol in the 900 MHz band. So in the ground station area there is a Wi - Fi router to receive radio waves. In this way, it may be said that the characteristics of civilian space development competition are that many consumer equipments are used. By the way, for the exchange with the moon, it is said that lime lag of 2.5 seconds on one way · 5 seconds round trip occurs.

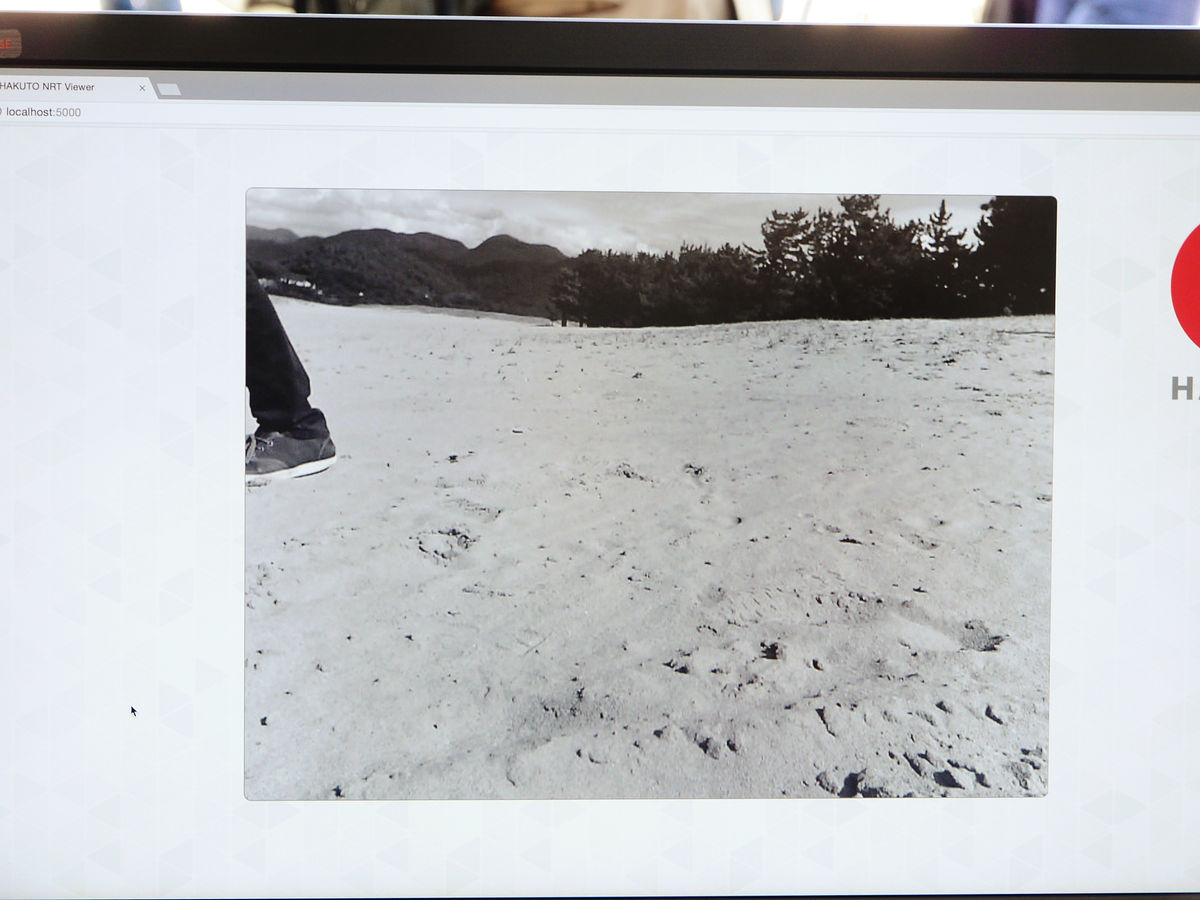
An example of moving images and machine body data sent from Rover. In addition to the images of the front, rear, left and right 4 cameras, telemetry data such as the tilt of the body and the number of revolutions of the wheel, and command menus such as "advance 50 cm" and "rotate 60 degrees" are displayed on the screen.

The image which is actually sent is kore. As it was daytime at this time, it seems to be quite different from the actual landscape on the moon, but it seems that it can be seen in the nighttime test that will be held later.
A state of a forward obstacle caught by ToF. The black and fine point displayed on the screen shows the positional relationship with the object, but what is the screen that captures the situation ......
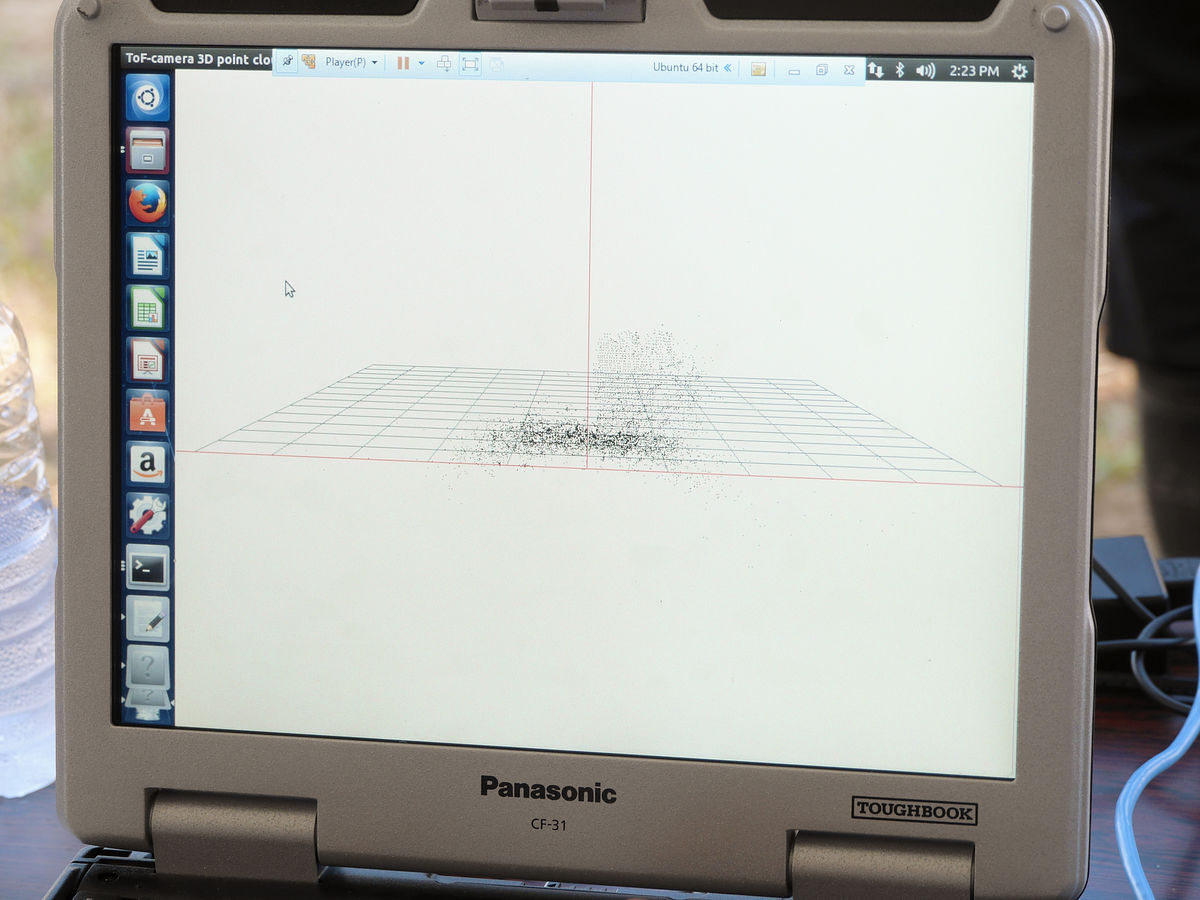
This is the situation where there is a big rock ahead. The Rover sends the surrounding situation captured in this way to the ground and the team of the ground station goes forward for 500 meters while judging the condition of the aircraft and simultaneously aims at clearing the mission by shooting with the camera.

The screen of telemetry data actually sent from Rover was like this.
Telemetry data screen sent from "HAKUTO" lunar explorer aiming for victory at lunar exploration race "XPRIZE" YouTube
The moving speed of the rover is about 100 meters per hour. In the unlikely event of falling down, it will be the end of one volume, so it may be that you need to run while checking the surrounding situation.
Takefumi Hakamada head of HAKUTO who responds to the interview. Regarding the purpose of challenging the mission, Hakamada said, "It is now time for everyone to challenge such a goal, so that if we can revitalize people through this activity." Also, when asked about the progress of the project, "Since we are doing trial and error in the laboratory beforehand, we have not experienced any major problems, and now we are working on the actual" flight model "going to the moon There is a place that is approaching the eighth grade as a whole ".

The prototype of the "flight model" that Hakamada touched was Kore. Although it is still in the prototype stage, there are parts different from the actual shape, solar panels for power generation are installed on the sides of the airframe, and the shape of the wheel is slightly changing.
The part of the nail attached to the wheel is rounded corners. In addition, the spokes connecting the shaft and the wheel body have a star shape, which is designed to support both sides and back.

Of course, a camera and a sensor for confirmation are installed around the fuselage. The logo of the partner company is printed on the aircraft at the present moment, but if it is an aircraft actually going into space, there is a possibility that the way of heat generation will vary depending on how sunlight hits the parts of different colors. For that reason, it seems that the real machine for production is supposed to perform the process of engraving the logo on the aircraft.

Solar panel mounted on the side of the aircraft. In actual equipment, solar panels are exposed to maximize power generation efficiency. The lightweight and strong CFRP (Carbon Fiber Reinforced Resin), a so-called carbon material, is used for the main body, and the weight of the aircraft has been significantly reduced from 7 kg of Preflight Model 3 to 4 kg about. It is said that launch cost of rocket will cost 100 million yen per kg, and it is one of the important efforts to reduce expenses.

Governor Hirai of Tottori Prefecture, which is working on HAKUTO's initiative, also visited the test site.

Governor Hirai who is interested and watching Rover. It was the figure of Governor Hirai who remained impressive to watch on television.

This is the end of the day's exam. From the night after that, a running test will be carried out in a condition where the real dark side of the environment is reproduced by applying a powerful light to the pitch dark Tottori sand dunes from the side. As I will add it later in this article, people I would like to see are GIGAZINE formulaTwitter·Facebook·Google+Please also follow up on account as we will inform you.
◆ Night Club
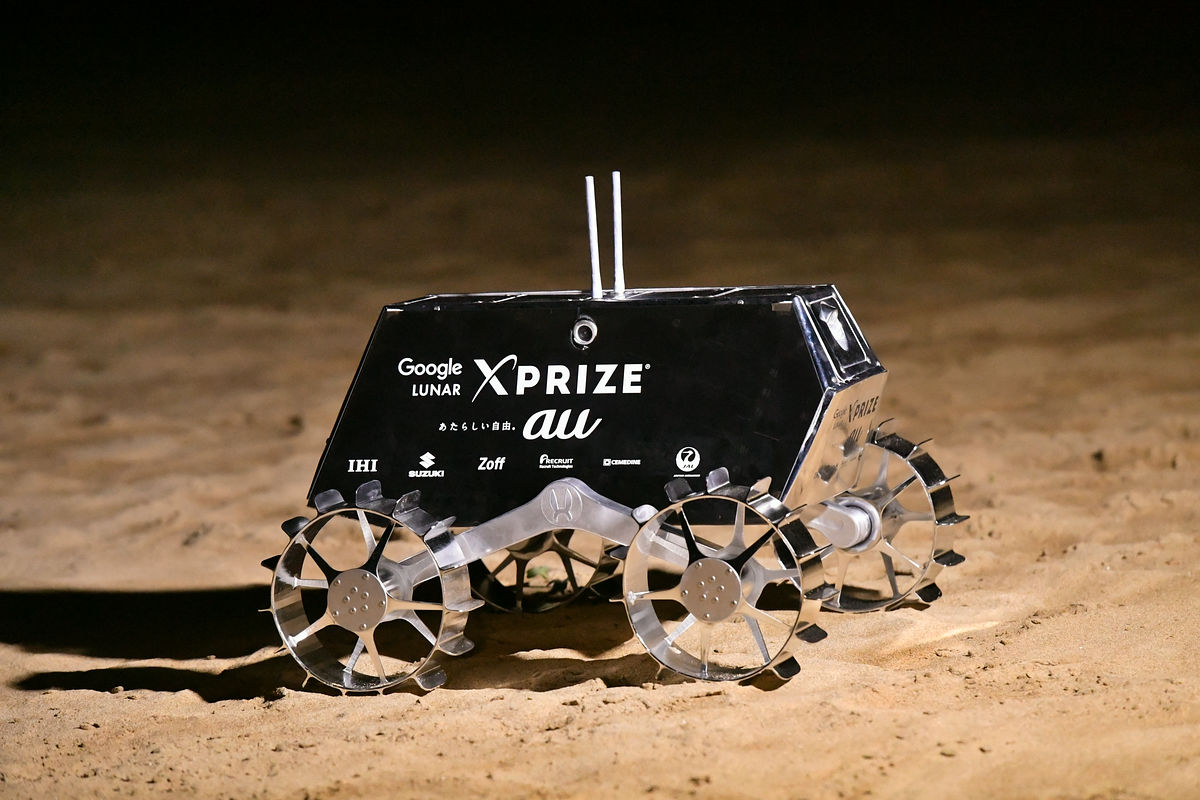
From 20 o'clock on the same day, a camera test at night was conducted. I can see a dazzling light under the starry sky, but it is a light source that reproduces the sun's light.

By illuminating a powerful light towards the ground, we reproduce the state of sunlight falling on the spacecraft. Because there is no atmospheric moon in the moon, there is no light diffusion, but this experiment is trying to reproduce the situation on the ground even a little.

The light source being used is a powerful light of 4 kilowatts. Although it can reproduce the illuminance of 20,000 lux with this light, it is still less than one sixth of the brightness of the predicted surface condition of the moon.

We will place the spacecraft at an angle between 0 and 180 degrees, centered on the object that looks like the moon stone, and we will check if the camera captures the image as per the performance. Once you set it once, measure it for a few minutes, then put it back and measure it, the steady work is repeated.

The monitor screen of the ground station looks like this. I will check the image one pattern at a time.

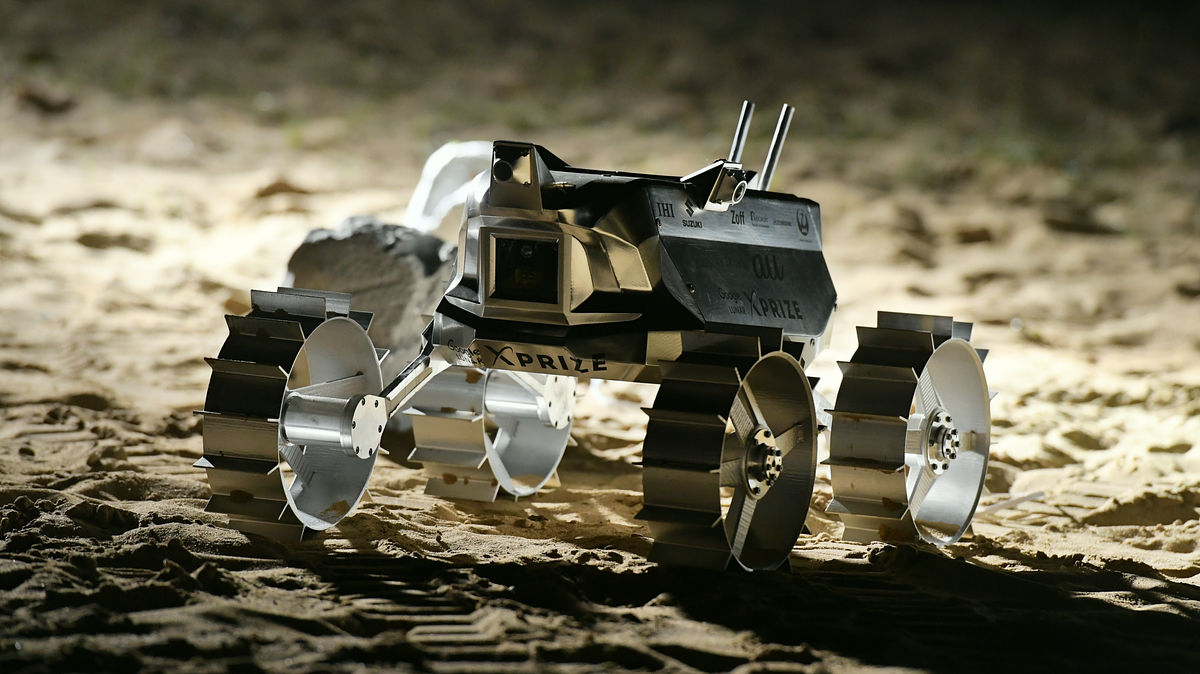
A prototype that protrudes in the darkness of jet black (prototype). Maybe the state of the spacecraft seen on the surface of the moon is like this.

There was also a prototype of "flight model" that could actually be launched. This is still a stage before the demonstration experiment.
Actually, how the rover runs while avoiding the rock by remote control is this. To make you feel the actual speed, we are publishing with the uncut.
A lunar surface exploration vehicle of "HAKUTO" aiming for victory at the lunar exploration race "XPRIZE" progressing forward while avoiding the rock - YouTube
Sometimes it is a test run on this day, and you may encounter troubles such as not being able to suck out the data well. However, it was also seen that the cause was investigated after that and the solution was successful.

The answer that made HAKUTO's Rover actually go to the moon is "Where in 2017" was actually included. This seems to include implications to keep track of the trends of other teams and it was to show that XPRIZE is about to arrive at the end.
Related Posts: