Human type robot diver "OceanOne" gains treasure from the sunken ship of Louis XIV remotely

A robot that can explore the deep ocean where human beings can not dive and work with the robot arm "OceanOne"Developed by Stanford University. The deep sea exploration robot OceanOne has successfully brought back the residue for the first time in about 350 years from the shipwreck of Louis XIV who sleeps in the deep sea with diving for the first time.
Stanford's humanoid robotic diver recovers treasures from King Louis XIV's wrecked flagship | Stanford News
https://news.stanford.edu/2016/04/27/robotic-diver-recovers-treasures/
You can understand what kind of robot OceanOne is in one shot by watching the following movie.
Stanford's humanoid robot explores an abandoned shipwreck - YouTube
Robot arm working in water ......
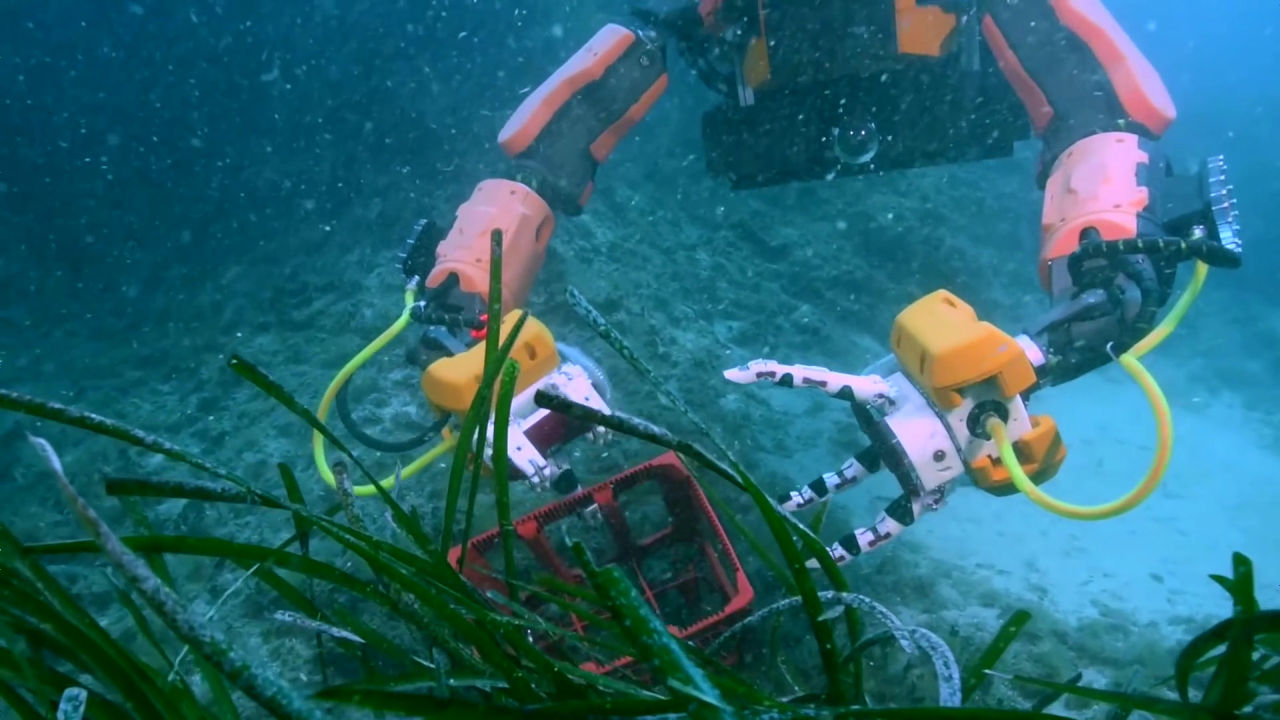
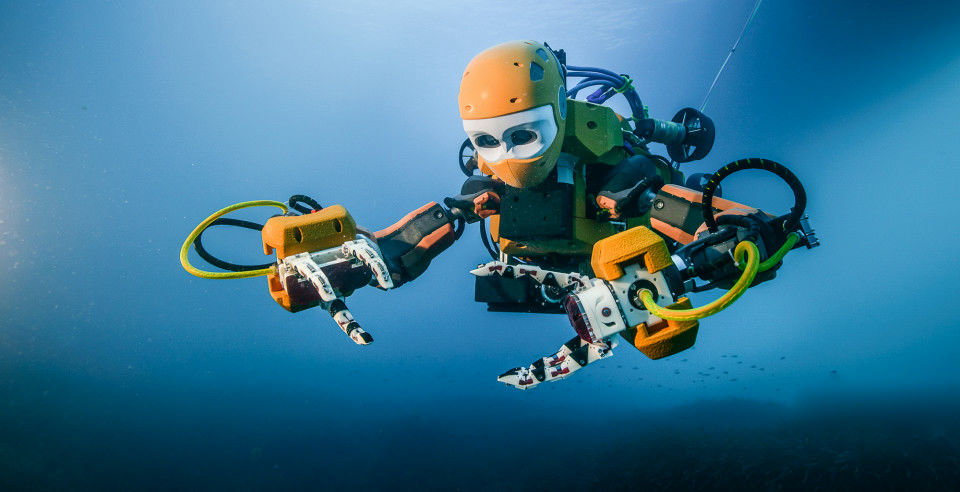
Well, this is a humanoid robot diver "OceanOne"
I collected the box brilliantly.
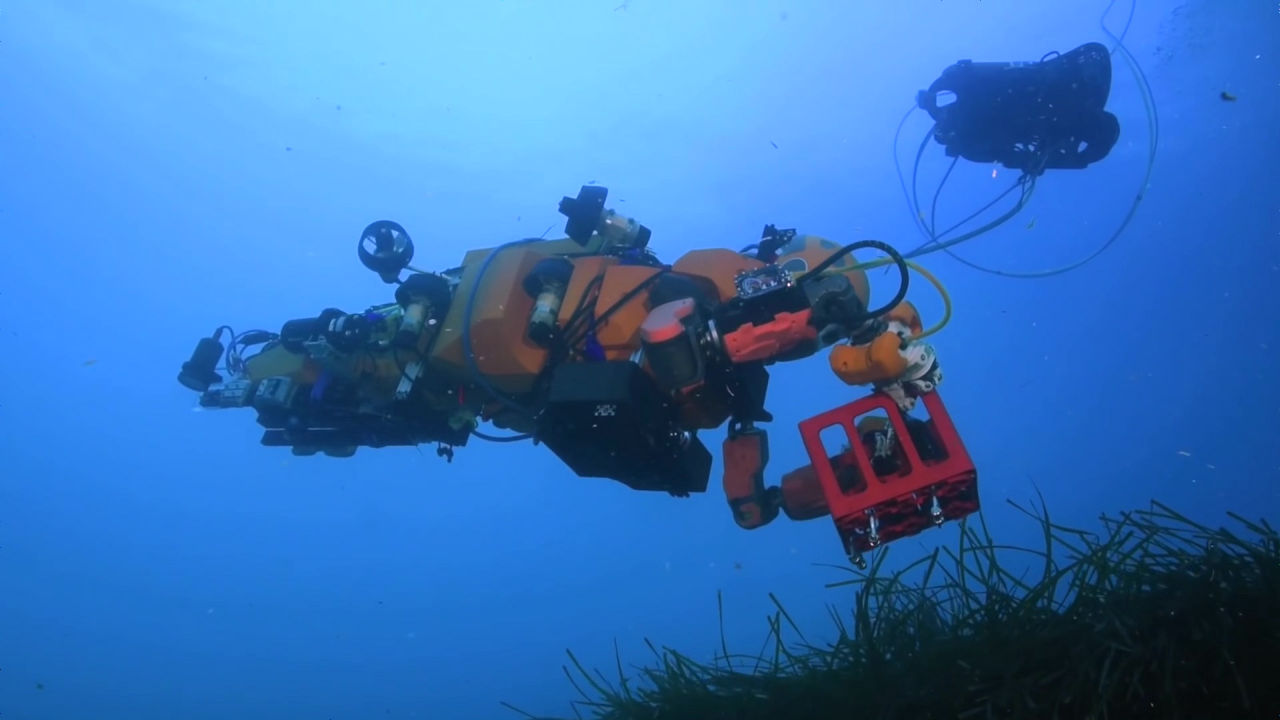
Professor Osama Katy, who studies computer science at Stanford University who developed OceanOne, said, "OceanOne was developed with the aim of expanding the possibility of underwater exploration."

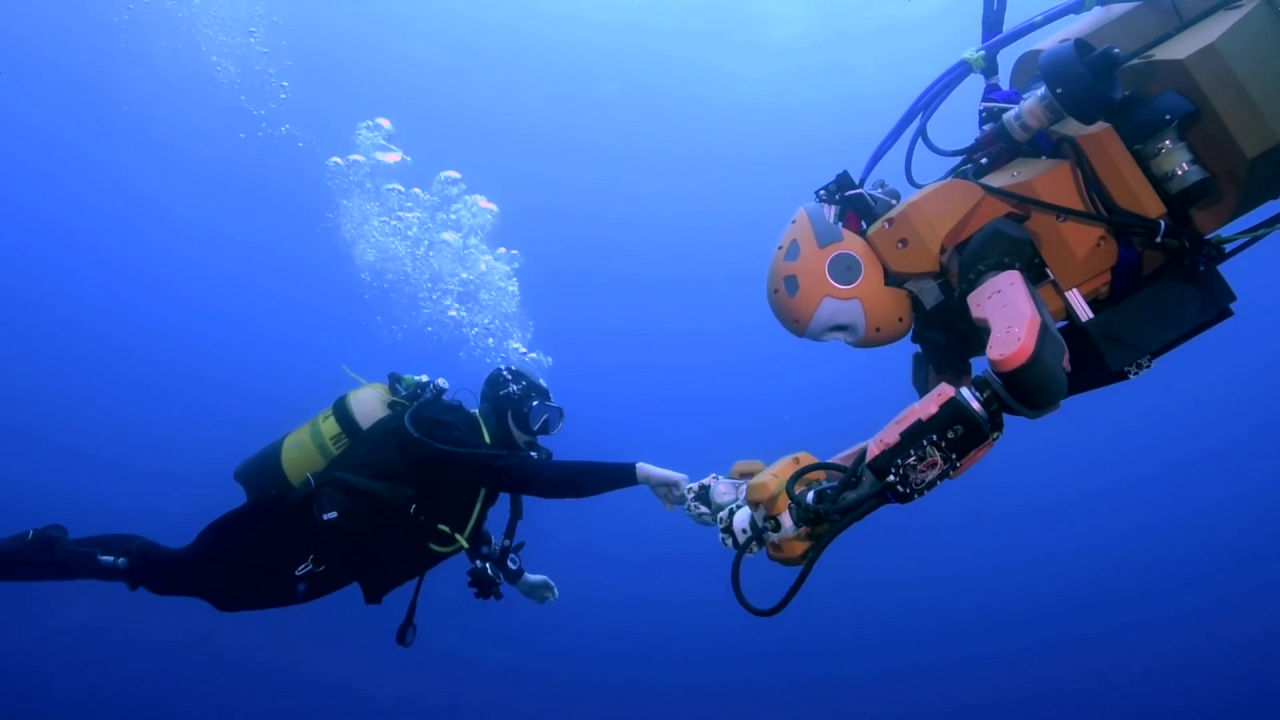
I received a hose from the diver OceanOne.

OceanOne is remotely controlled from the ground.
Stretch a thick hose deftly ......
Shrinking.
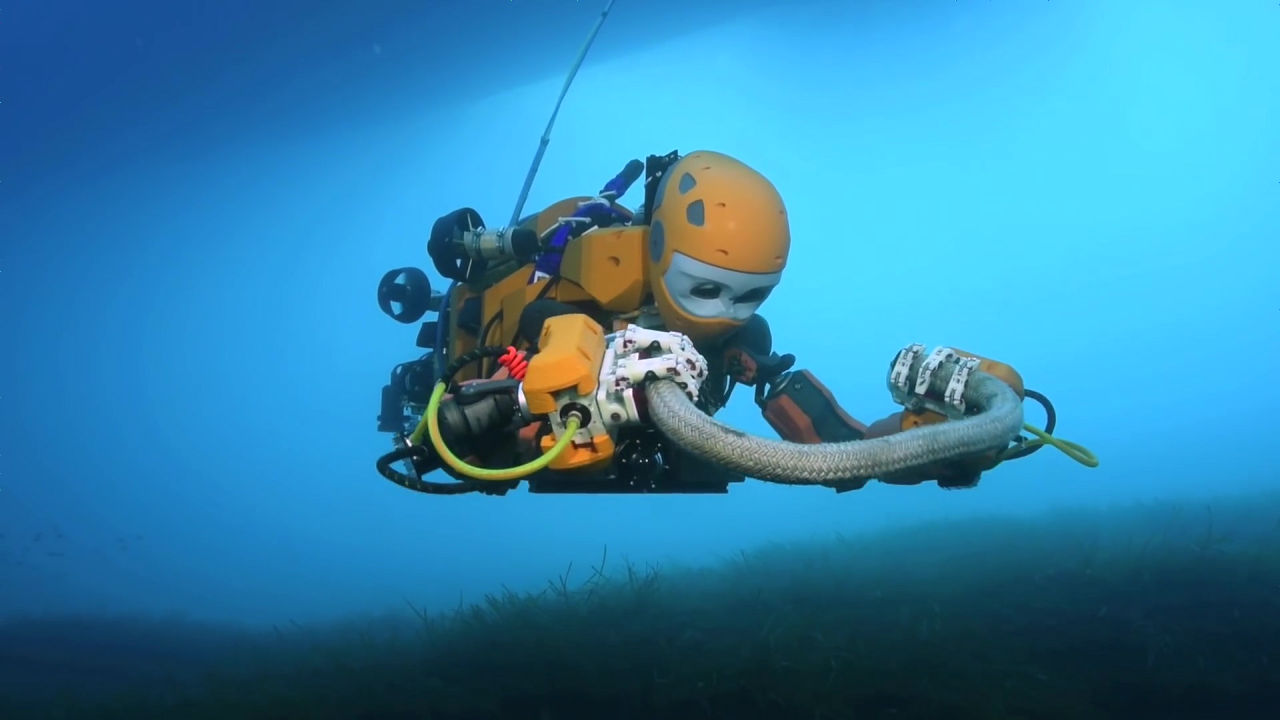
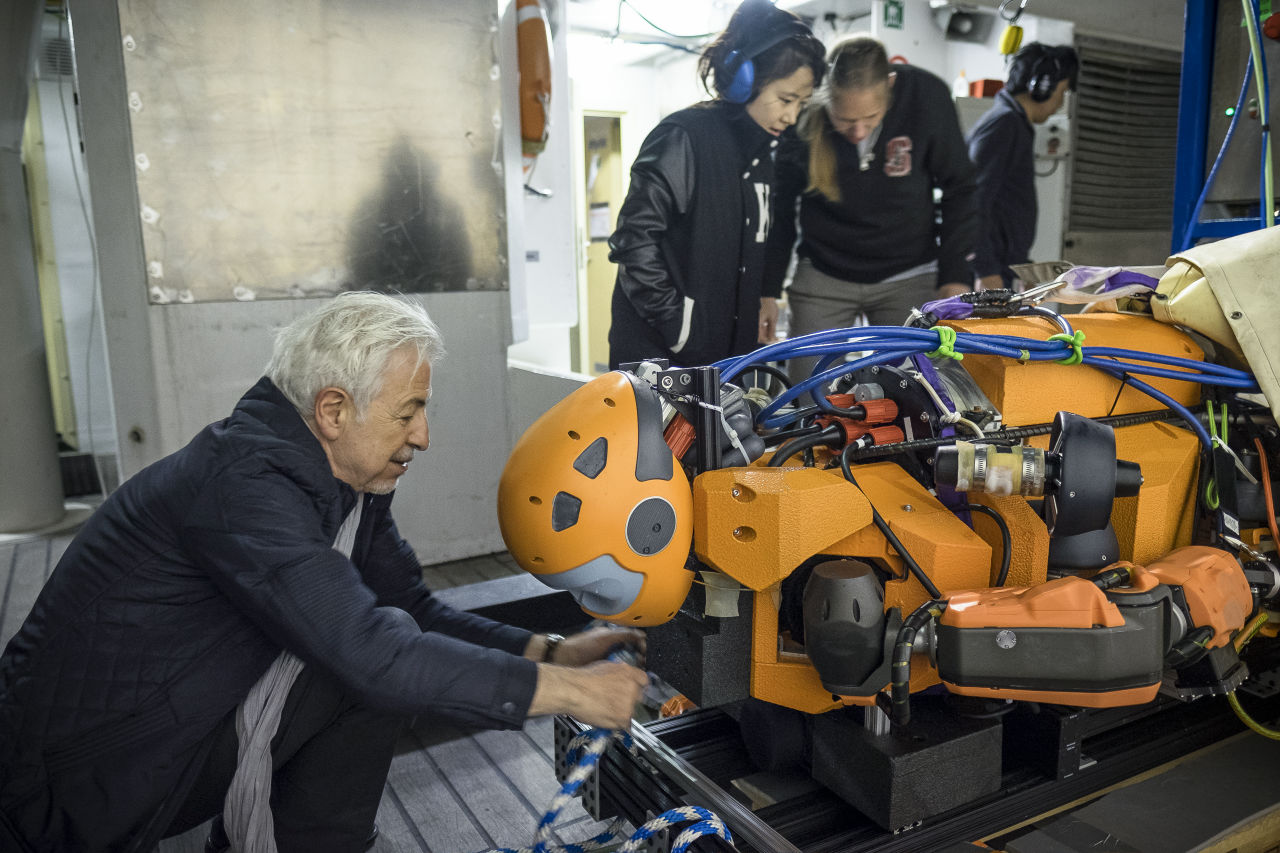
The production scenery of OceanOne looks like this.
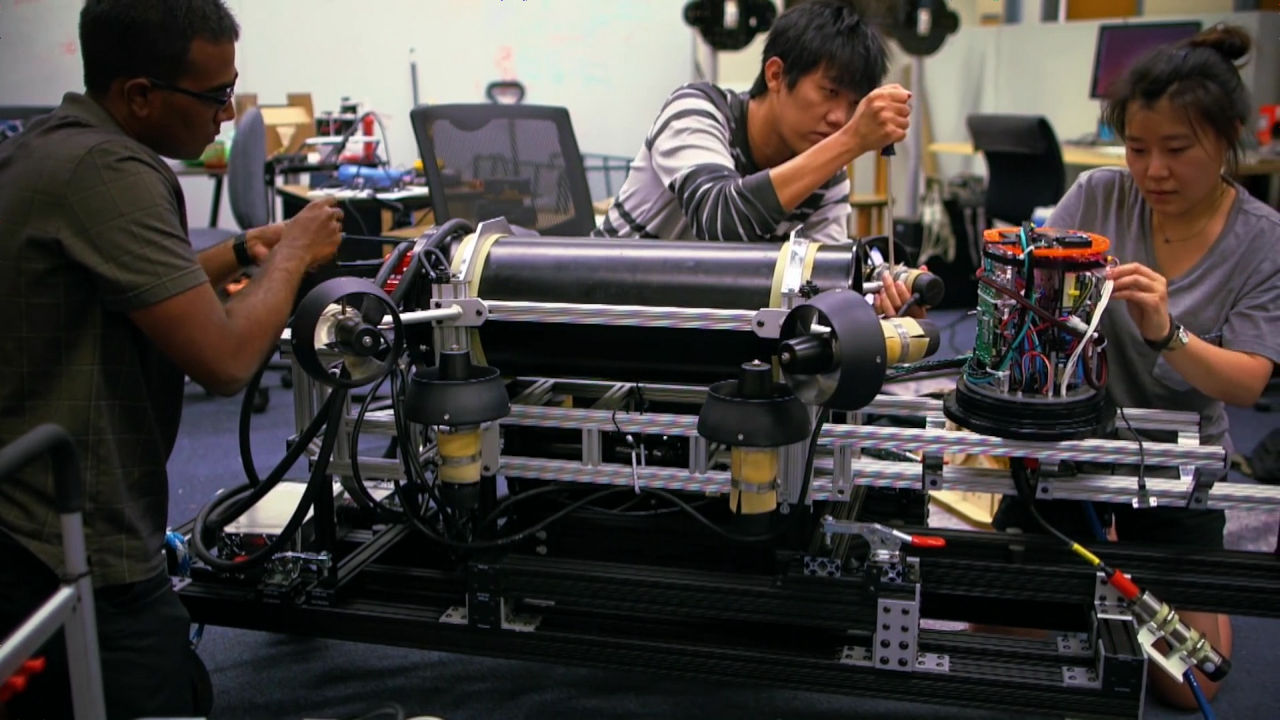
It has almost like a human face and it has both eyes.

"OceanOne can do physical exercise just like a human being, such as grasping objects, but OceanOne's greatest feature is" to have tactile sensation "."

"You can experience the underwater work, including the touch from above the boat."
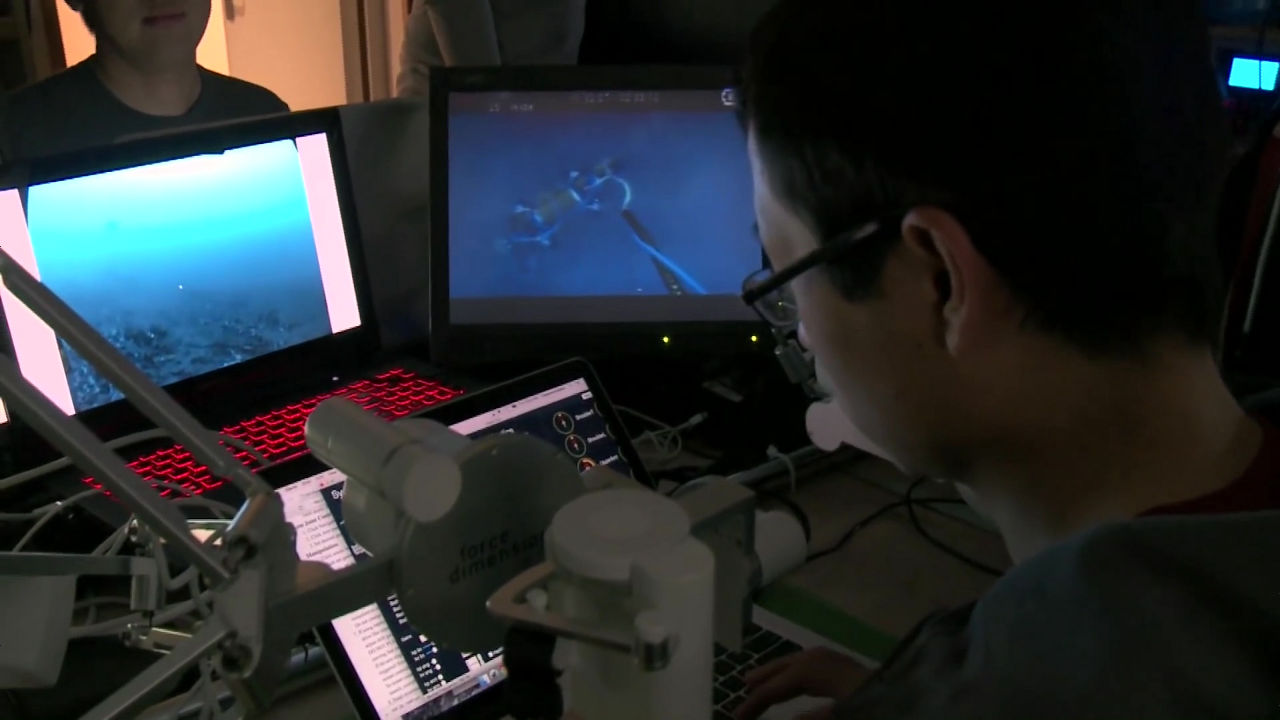
OceanOne pilots with this equipment. You can grab things, expand both arms, and work as you want.

This is the production scene of the arm control program.

Training is held to grab things and put them in small collection boxes.
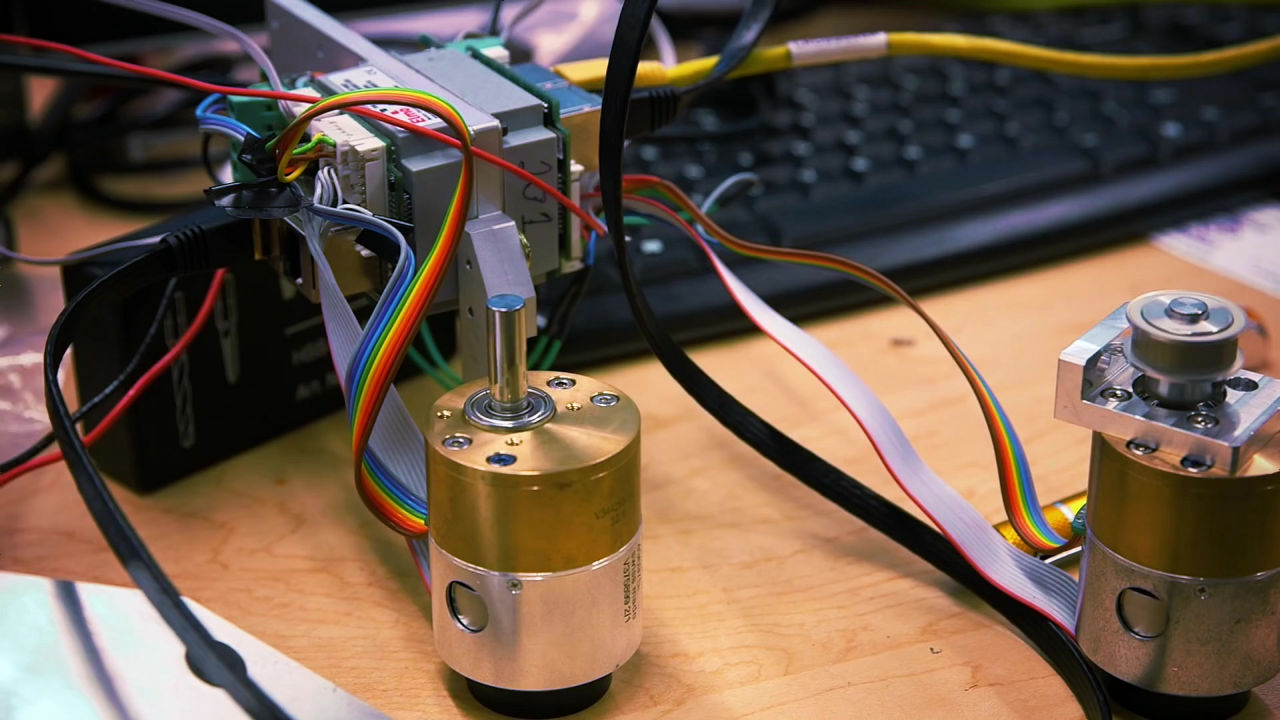
OceanOne 's robot arm is equipped with a sensor. By receiving the signal, a small motor of the controller section rotates, so that you can tell the sense of tangible objects underwater by vibrating etc.
Testing of the prototype was done in the pool.

We issue instructions from the poolside.

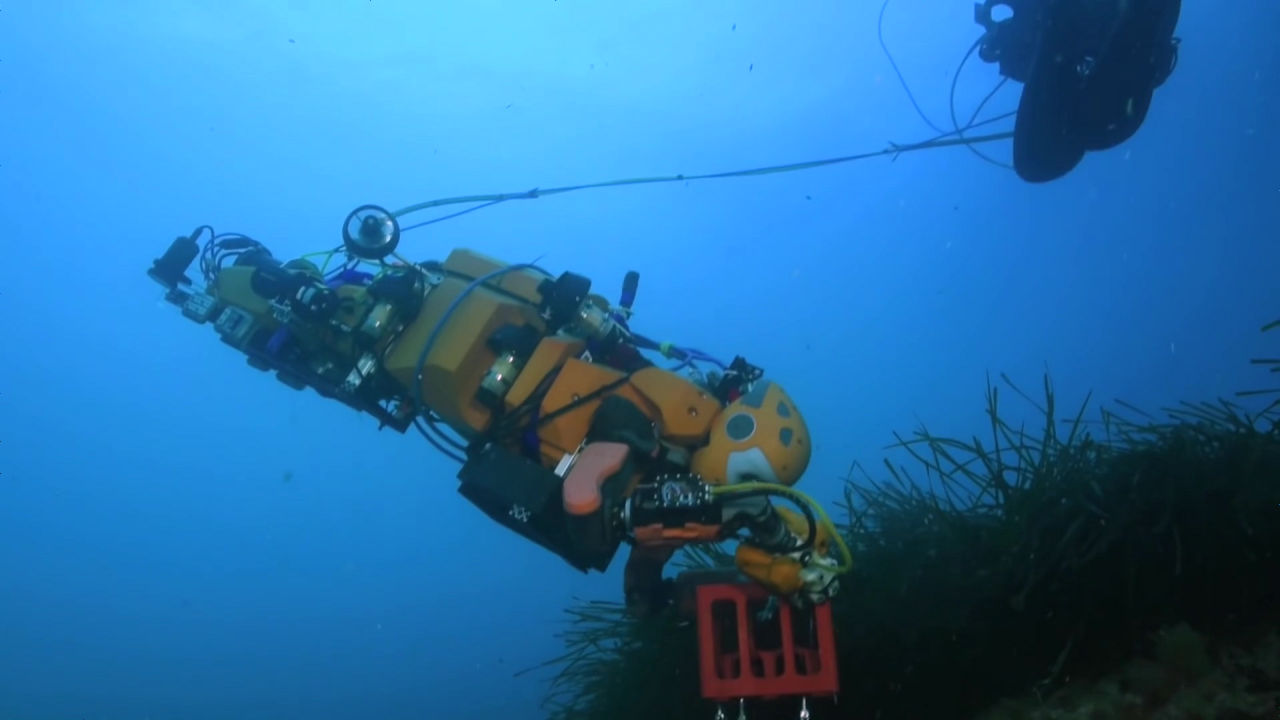
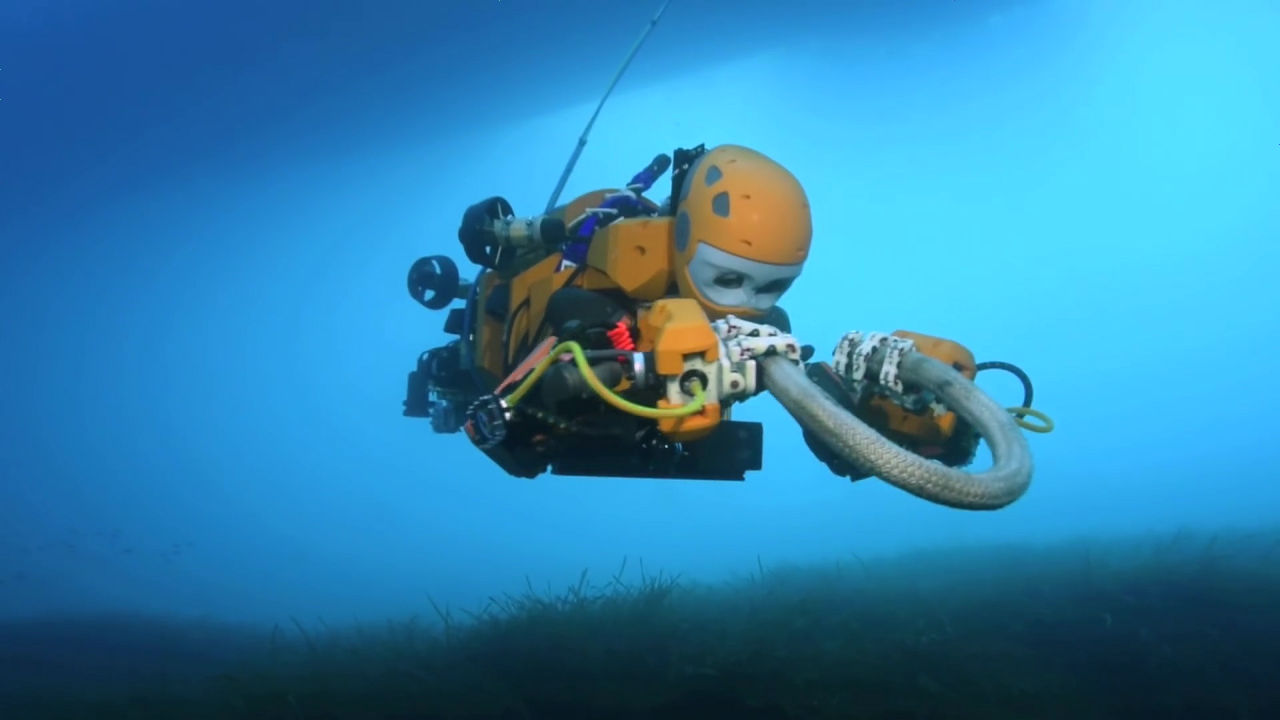
The upper body is like a human being.

The total length is about 5 feet (about 150 centimeters). Batteries and computers are carried in the part corresponding to the legs.

People who watch OceanOne by the pool side.

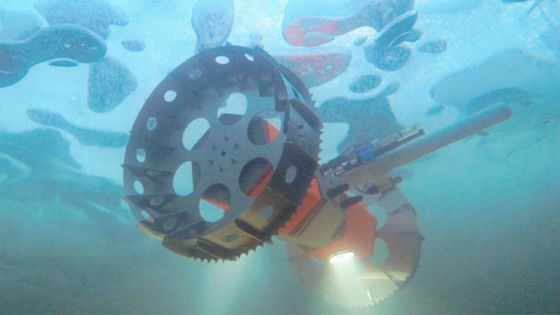
The propulsive force is obtained by turning the propeller oriented in the front / back / up and down direction.
OceanOne of oil control can divide up to the maximum depth of 2,000 meters.
OceanOne has an algorithm that recognizes the surrounding environment from the camera image and avoids collision. In addition, it has a water flow sensor and can control the posture automatically, so the pilot can concentrate on obstacle avoidance behavior.

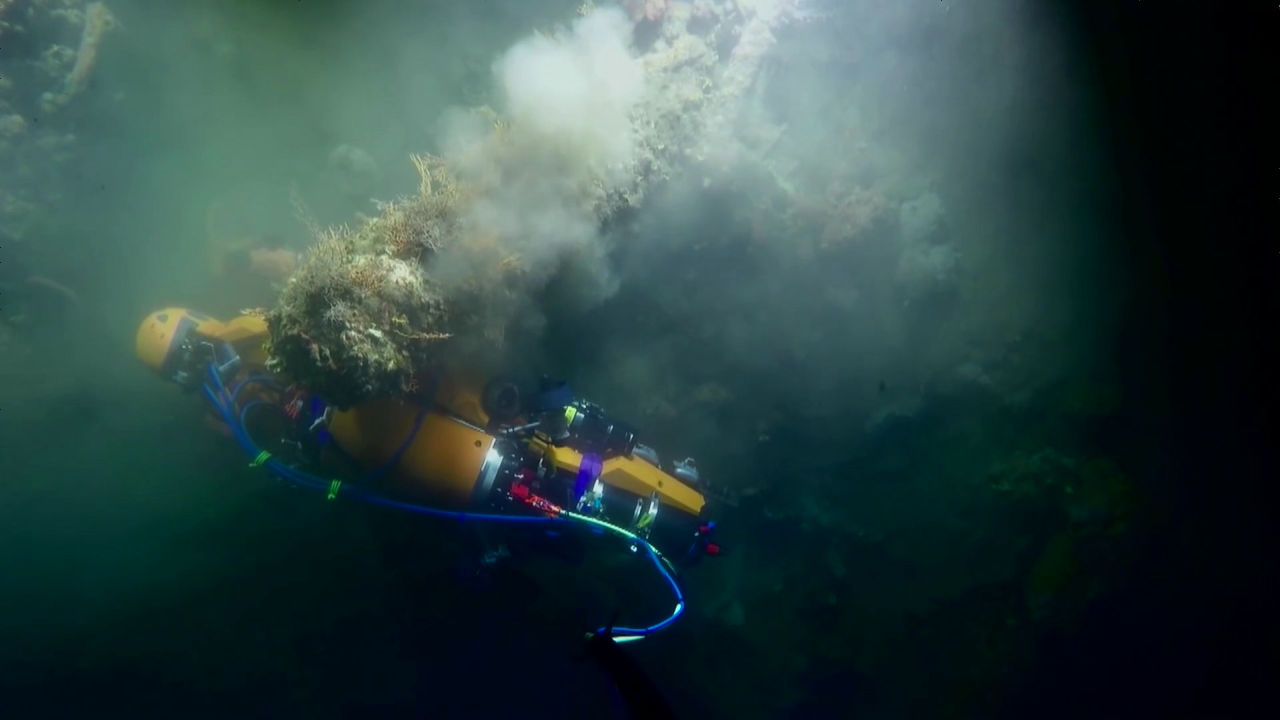
By using OceanOne it is possible to safely explore deep and dangerous waters where human divers can not reach.

"Gucci" with the diver and the movie is over.
OceanOne who ended the test diving finally was brought into actual battle.
Professor Kativ who makes the final check.
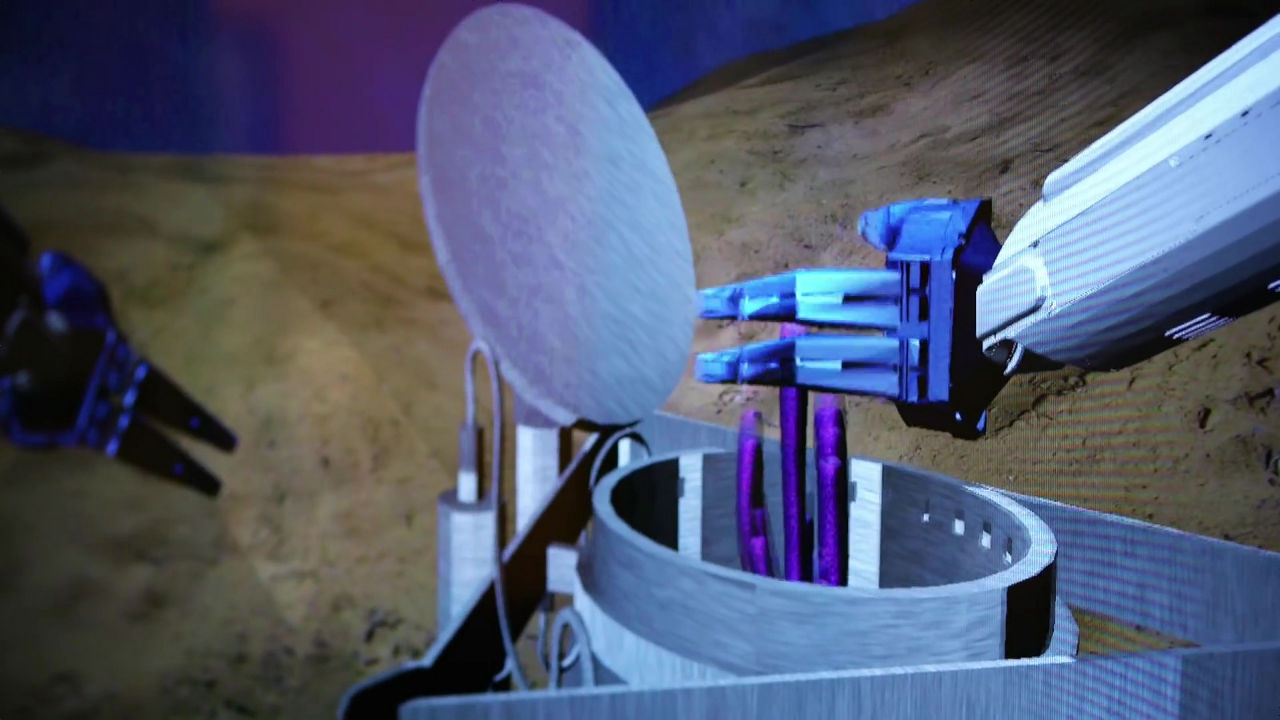
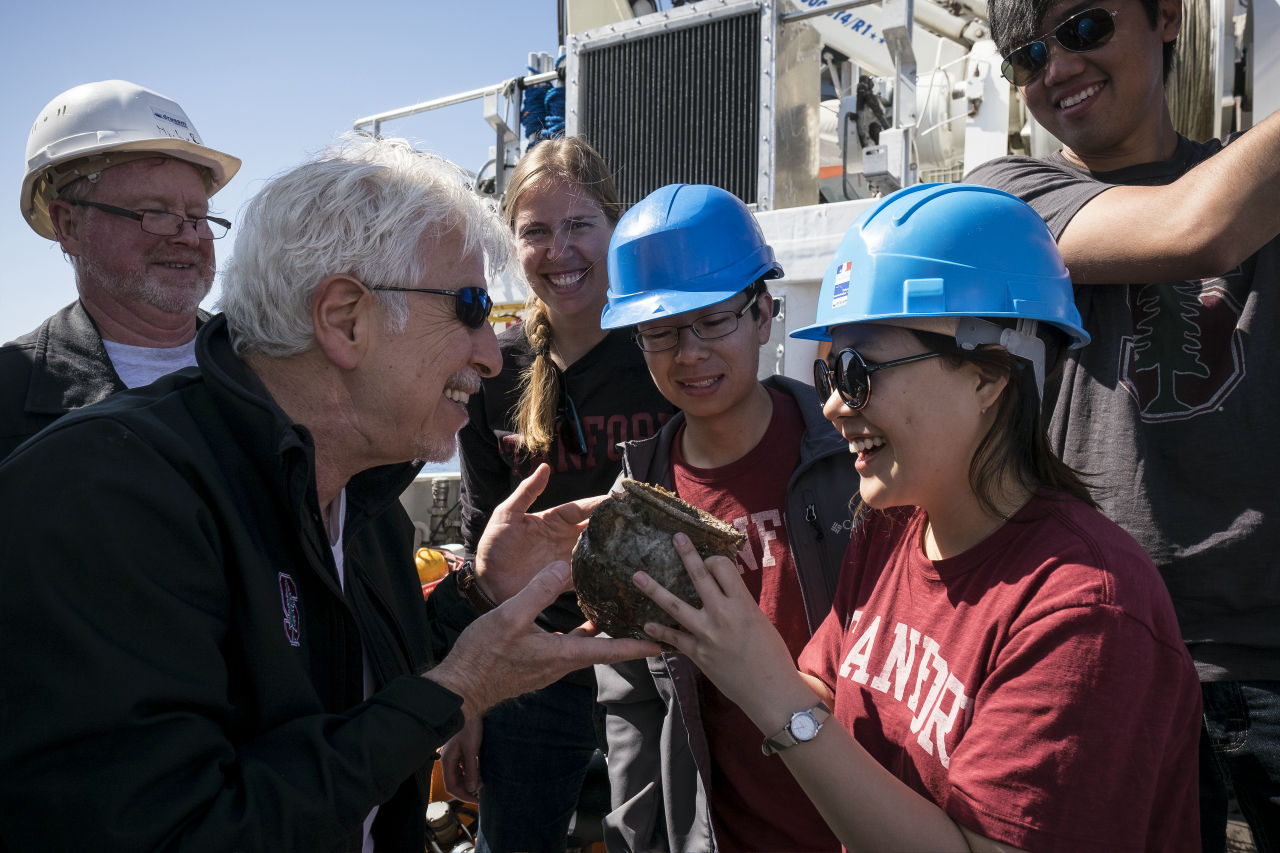
The mission of the virgin diving is to collect treasure from the ship Louis XIV 's ship "La Lune" that sank in France off the coast of 1664.

The maneuvering took place at the control center on the ship.

OceanOne brought something back to a small box.

Succeeded to get a grapefruit size vase from the Lune on the first OceanOne mission went with a deep-sea archaeologist. I accomplished a great achievement for collecting the lunches of the Lune for the first time.
OceanOne is supposed to be used for various activities in dangerous waters where human beings are not dirty, such as investigation of deep sea underwater ruins, maintenance of submarine cables and survey of submarine volcanoes.
Related Posts: