An exoskeleton that reads brain signals and `` moves just by thinking '' is developed

A research team
An exoskeleton controlled by an epidural wireless brain? Machine interface in a tetraplegic patient: a proof-of-concept demonstration-The Lancet Neurology
https://www.thelancet.com/journals/laneur/article/PIIS1474-4422(19)30321-7/fulltext
The Lancet Neurology: Pioneering study suggests that an exoskeleton for tetraplegia could be feasible | EurekAlert! Science News
https://eurekalert.org/pub_releases/2019-10/tl-pss100219.php
The following movie shows how a patient with limb paralysis actually moves the exoskeleton developed by the research team.
Exoskeleton Controlled by a Brain-Machine Interface-YouTube
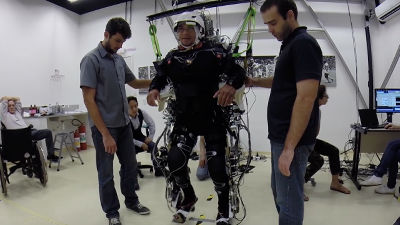
In the following scene, a 28-year-old French male patient is wearing the developed exoskeleton. The subject is paralyzed from the shoulder, and the biceps and left wrist move only slightly, and he usually lives on an electric wheelchair with a joystick that can be operated with the left hand.
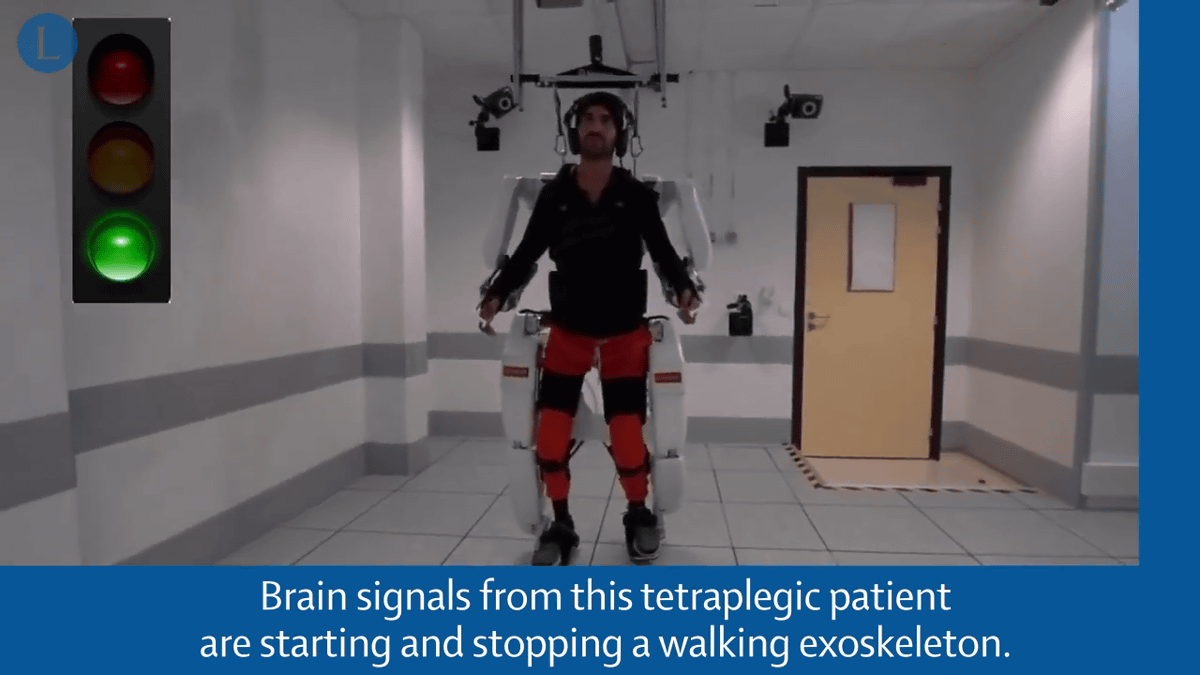
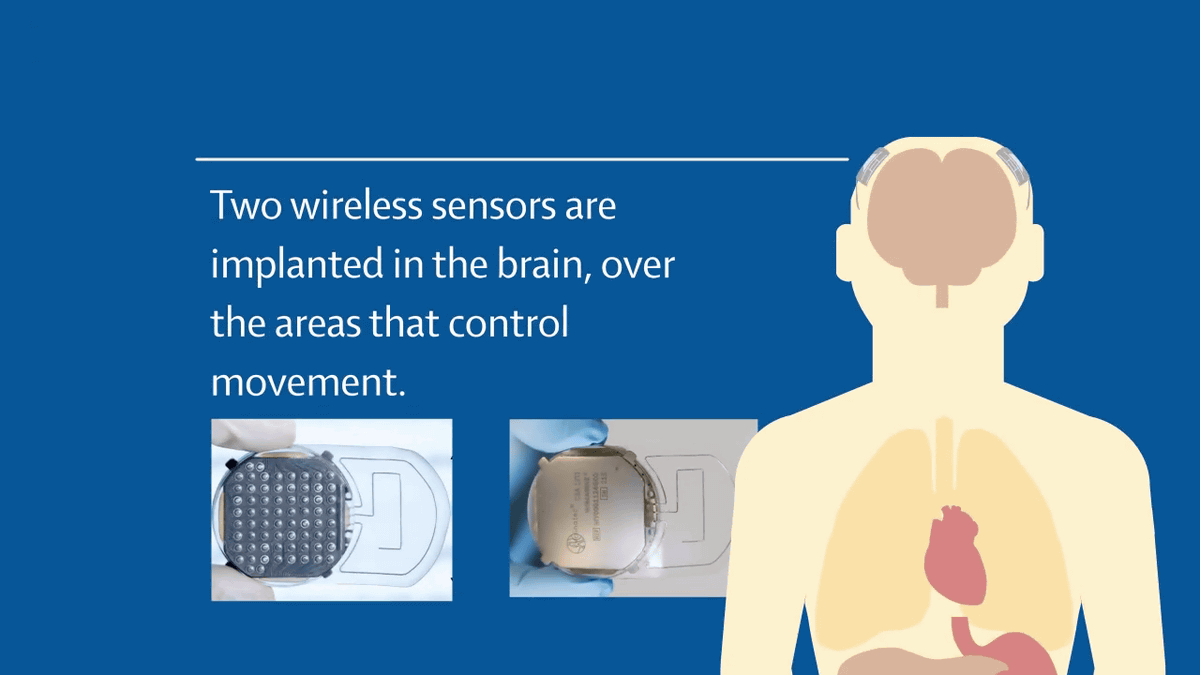
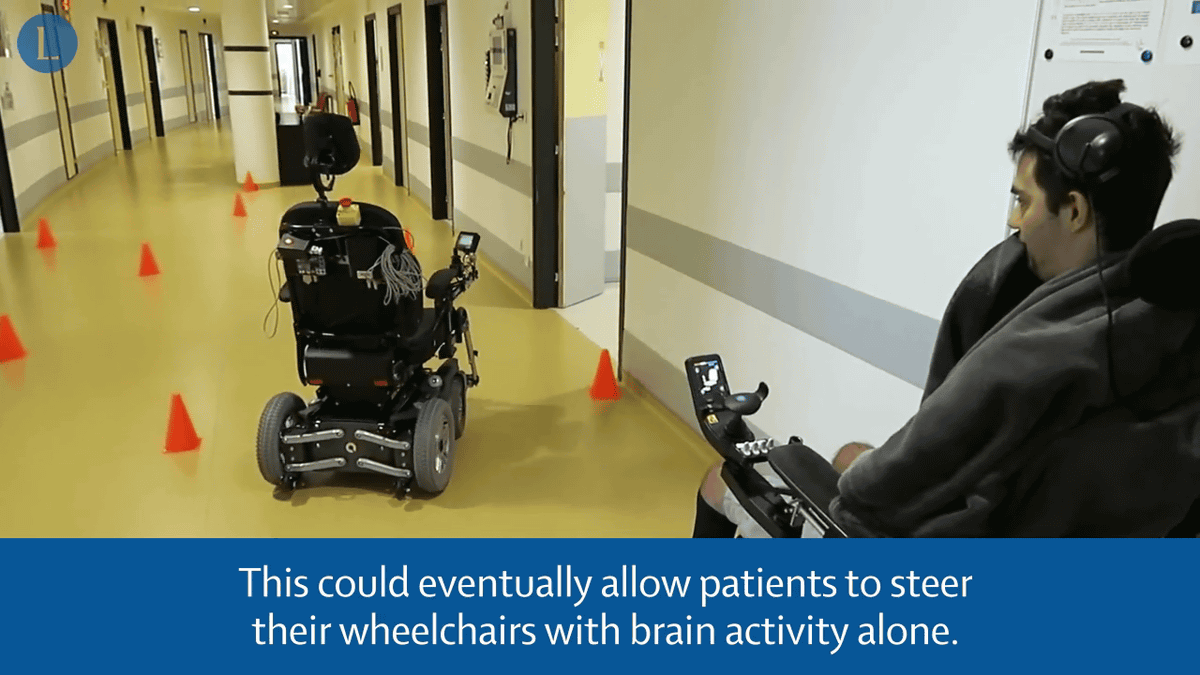
The patient has two wireless sensors for exoskeleton control embedded in the head, and the brain can command the start and stop of the exoskeleton. There have been similar studies on “manipulating wheelchairs with brain signals” so far, but most of them require large-scale surgery to embed electrodes directly into the brain. However, the sensor developed by the research team at the University of Grenoble Alps is a semi-invasive sensor that is implanted between the brain and skin.
After the patient has undergone surgery, the patient first trains in virtual space before using the exoskeleton in order to learn the special technique of “operating with the brain”.
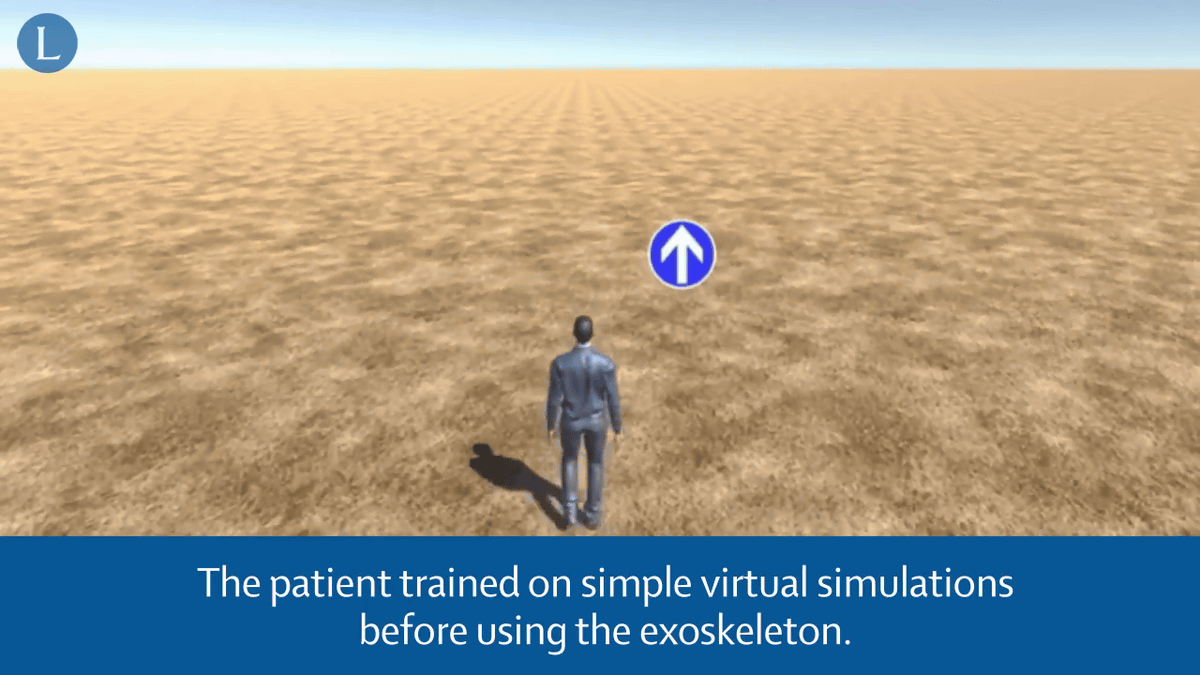
While moving the avatar's limbs in the virtual space, playing the game and playing the catch ball, the patient performs a simulation of moving the hand and moving the joint. It took about one and a half months before the subject was able to operate the exoskeleton, and home training using avatars and games was done for about three months.

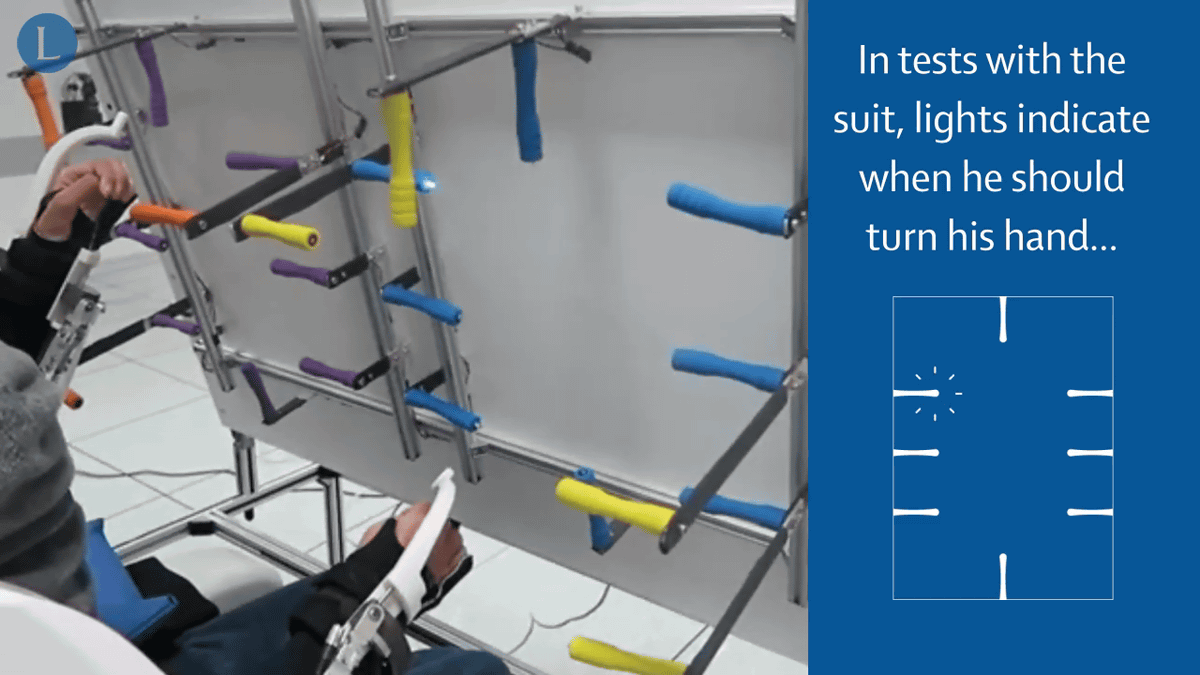
In the following scene, the patient performs the training of “touching with the hand when the light attached to the stick shines”. It seems that the subject's patient was able to hold objects with both hands 16 months after undergoing the operation of implanting the sensor.
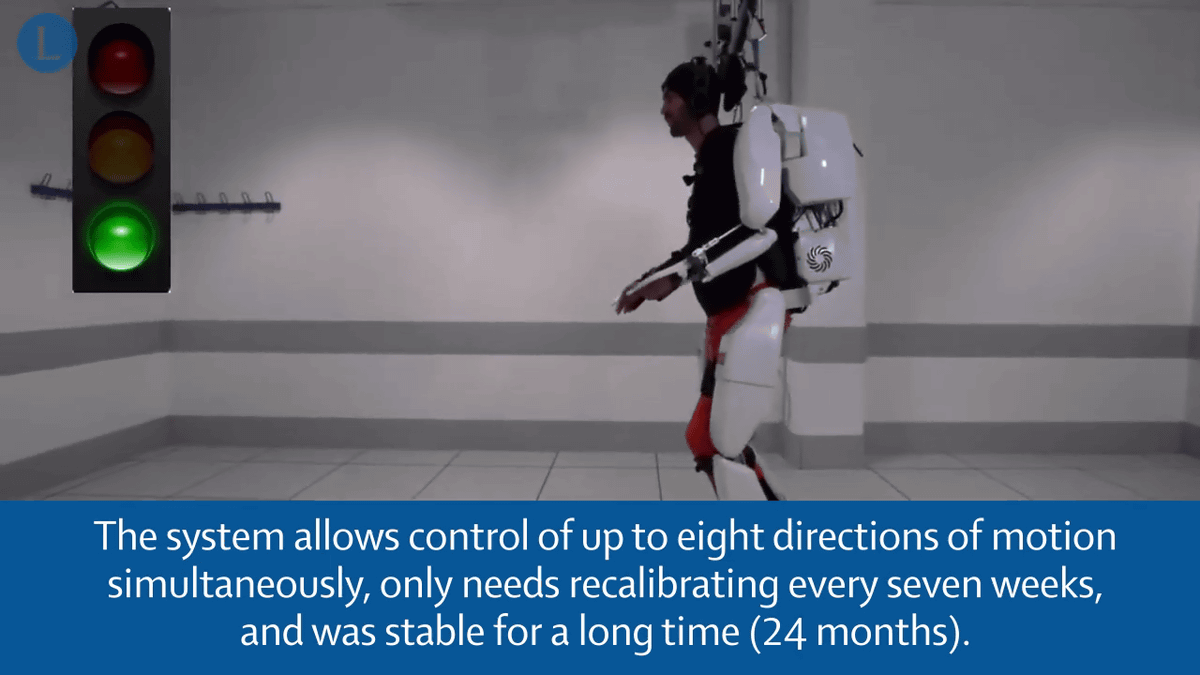
There are 14 exoskeleton drive units. In an experiment conducted over 24 months, the exoskeleton showed stable movement from start to finish, and recalibration was not necessary for up to 7 weeks. However, since the exoskeleton is not yet equipped with an autobalancer, it was necessary to walk while hanging the exoskeleton from the ceiling in the experiment. The research team says that the future research topic is “to enable patients to walk autonomously without support”.
Stephan Chabardes, professor of neurosurgery at the University of Grenoble Alps, said, “A patient with quadriplegia will be one step closer to the future of operating computers using only brain signals. For example, using a brain activity instead of a joystick in a wheelchair You may start with driving and develop exoskeletons that enhance athletic performance. '
Related Posts: