A robot which imitates "Basilisk" and runs on water with four legs

Regarding the attempt to mimic the movements and mechanisms of living things to make a robot, for exampleA robot made by imitating the movement of a dogAndA robot that imitates the amenbo floating on water using the surface tension of the water surfaceThere are various things from the past, but famous as a lizard that can run on water with two legs "Basilisk"Nano Robotics Research Institute at Carnegie Mellon University developed a robot that mimics the movement of water.
Details are below.
NanoRobotics Laboratory
(PDF file)A Novel Water Running Robot Inspired by Basilisk Lizards
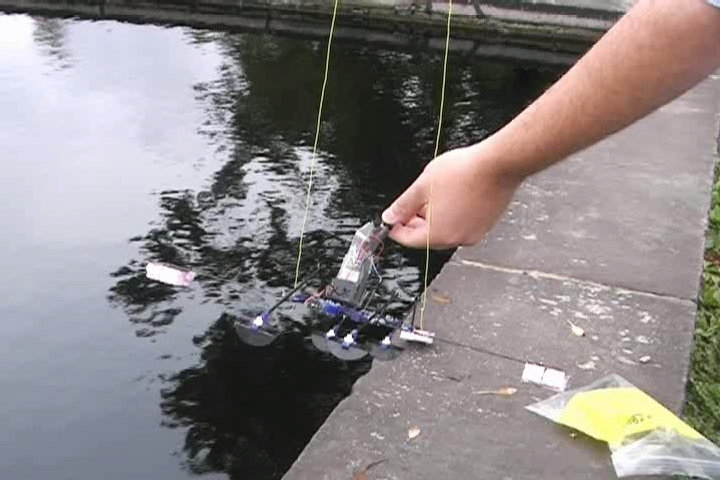
This is the water running robot "Water Runner". I understand that almost all parts are made of resin in order to lighten to the limit. Because it is a demonstration model, power is supplied from the outside by wire.
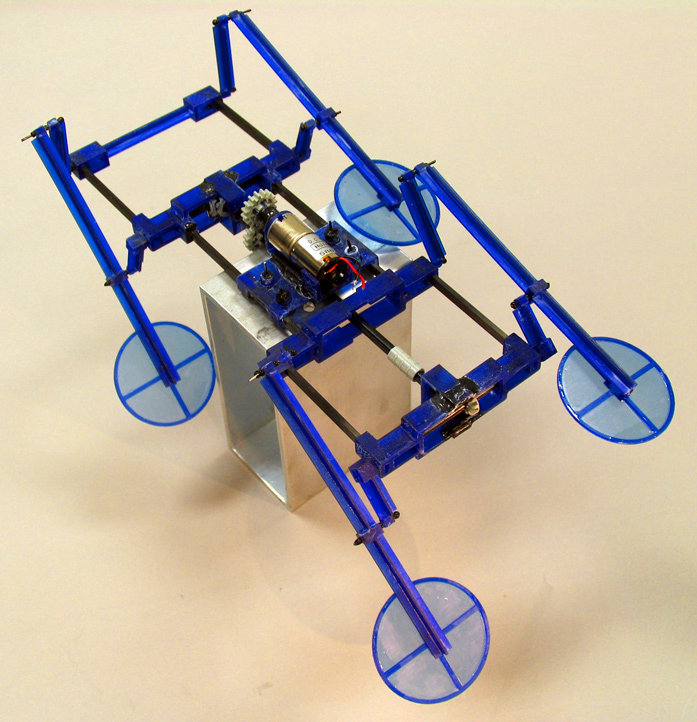
This robot is a kind of lizard "BasiliskIt is a thing that imitated the movement by analyzing the principle of running on water.
YouTube - Jesus Christ Lizard
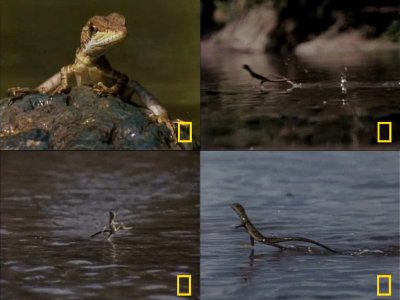
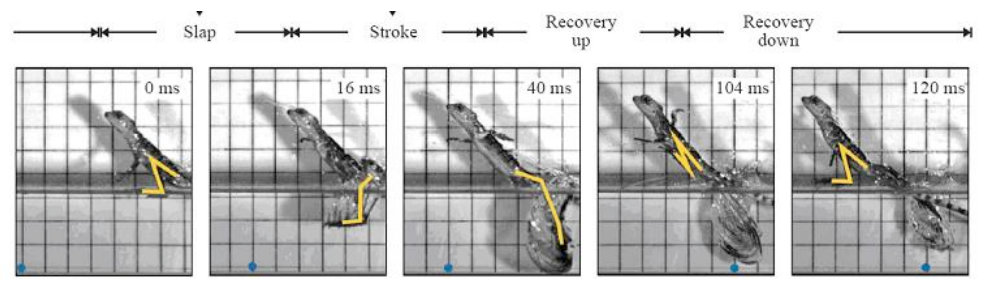
Fig. Analysis of basilisk's foot movement. Run on the water by doing a series of basilisk movements, such as hitting the water, raising the feet, before sipping, at a rate of 0.12 seconds per it
Let's see where we are actually running
Water runner with off board power in small pool

It may be hard to see because it is messed up with images, but I think you can see that it runs properly as a moving image. Wire for power supply is attached, but because it is sagging, it does not mean that it is pulling from above and floating.
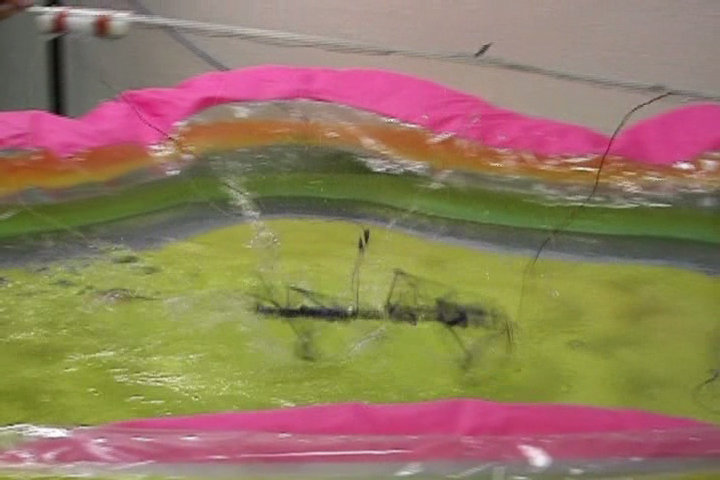
Slow motion video by high speed shooting
High speed video of water runner in small pool

He said that the movement is optimized so that the efficiency is higher than the limit on the skeleton with the limit of the basilisk. That is to say that efficiency alone is beyond living things

Experiment machine with power supply. However, it should be stopped by any chance, and there will be straps for when direction change is necessary.
Water runner with on board power running on open water

There is a float shape for balancing left and right, but it is a moment to touch the water, so it does not seem to be buying buoyancy by this.
An imaginary view of a biped walking type that will be developed in the future. It seems to be controlled wirelessly.

Currently there is only function to run straight, but in the future it is planned to change the direction on the water and to have amphibious capability. Moreover, it seems that we want to make it possible to operate independently without lifelike by reducing weight. Fighting manga "Grappler BakiCharacters in the work ofRika KaoThere runs over the water ... Although there was a scene that development is currently being promoted rumor military reinforced exoskeleton, so-called "Powered suitIt might be interesting if we could incorporate this mechanism into.
Related Posts:





in Note, Posted by darkhorse_log