Toshiba developed Quadruped Walking Robot for Fukushima Daiichi Nuclear Power Station
Toshiba developed a quadruped walking robot for Fukushima Daiichi Nuclear Power Station, which carries out surveys and restoration work in areas where people can not work. The robot moves by wireless operation, walking speed is 1 km / h. It is possible to drive for 2 hours in a row.
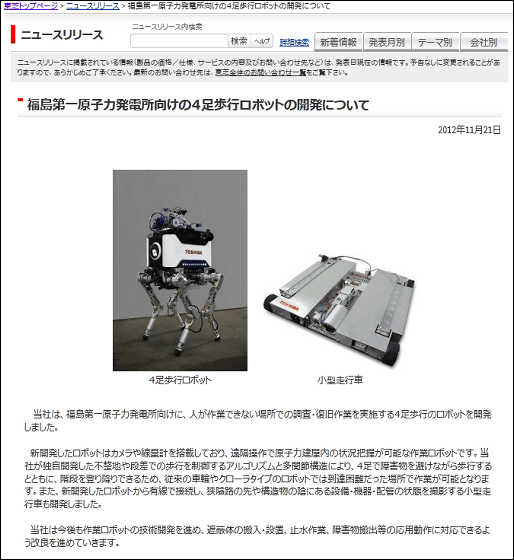
Toshiba: News Release (2012-11-21): On Development of Quadruped Walking Robot for Fukushima Daiichi Nuclear Power Plant
http://www.toshiba.co.jp/about/press/2012_11/pr_j2101.htm
TEPCO Fukushima Daiichi Nuclear Power Plant suffered great damage due to the Great East Japan Great Earthquake of March 11, 2011 and the tsunami that occurred immediately after that. Decommissioning furnaces have been decided for Unit 1 to Unit 4 of the power plant, and the electricity business legally also dealt with "abolished", but the spent nuclear fuel is still left. Due to the high radiation dose in the surrounding areas,Disaster response support robotAnd so on have been introduced.
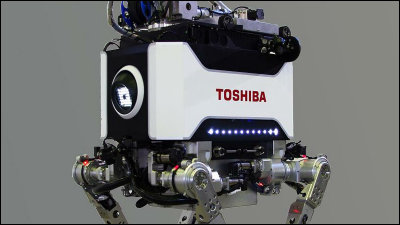
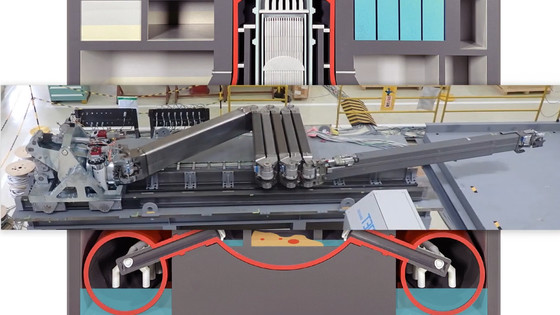
This is a quadruped walking robot of wireless operation developed by Toshiba Cor. It is equipped with a camera and a dosimeter, and it is a working robot that can grasp the situation inside the nuclear power building by remote control. Toshiba's proprietary development of walking with uneven terrain and steps and multi-joint structure realizes walking and stairs up and down while avoiding obstacles, so you can reach with wheels and crawler type robots It is possible to work in places you did not have.
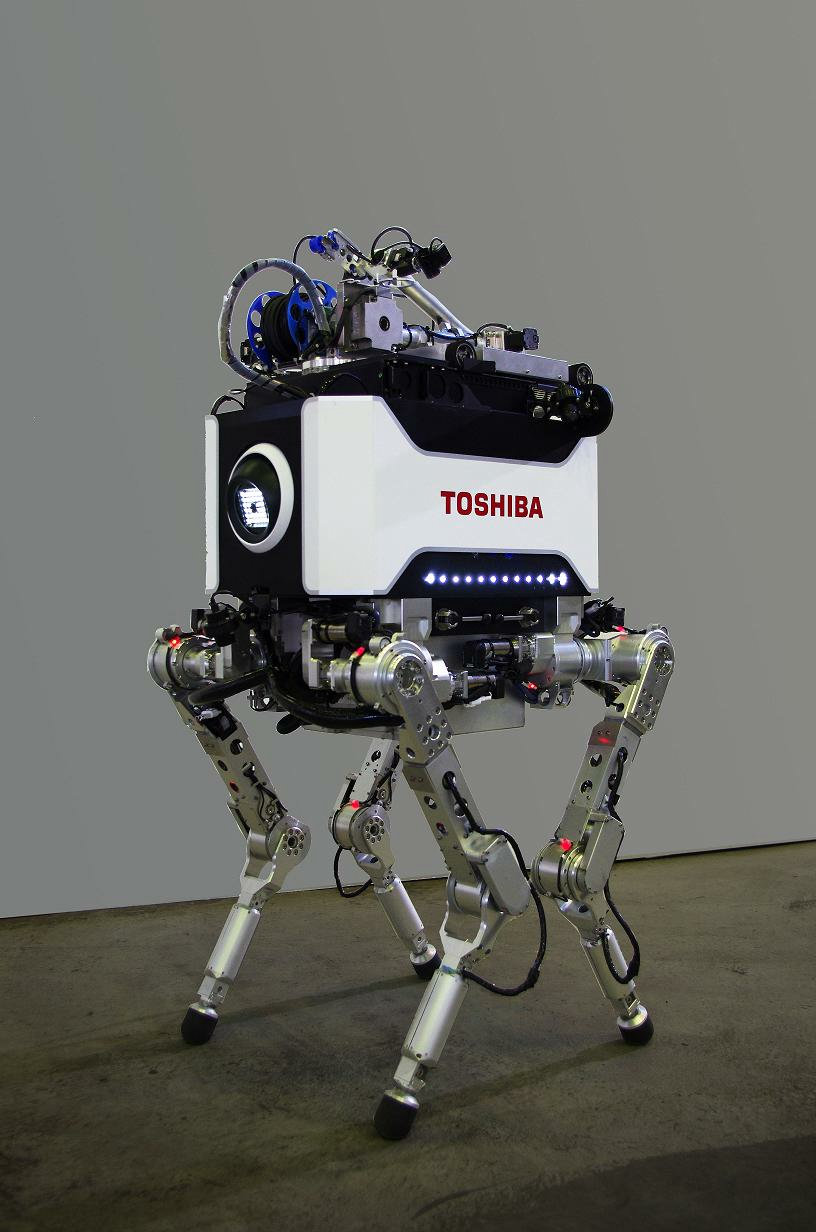
The size is 624 mm × 587 mm × 1066 mm, the weight is 65 kg. With a battery installed, you can drive for 2 hours when walking continuously. The payload weight is 20 kg and the walking speed is 1 km / h.
Incidentally, here is a compact car that connects with this quadruped walking robot by wire. You can take a picture of the state of equipment, equipment, piping in the shadow of a narrow path or behind a structure.

This is 313 mm × 327 mm × 47 mm and weighs 2 kg. It can be driven for 1 hour with a battery. Traveling speed is 0.2 km / h.
Related Posts:




in Hardware, Posted by logc_nt