ロボットに炒め料理のテクニックを教えるコツとは?

人に代わってさまざまな役割を果たせるロボットも、まだまだキッチンには課題が多く残されています。香港中文大学、武漢大学、スイス・Idiap研究所の研究者は、ロボットに中華料理の「炒め物」をさせるためのアプローチを行い、実際に調理の動きを再現することに成功したとのことです。
Robot Cooking With Stir-Fry: Bimanual Non-Prehensile Manipulation of Semi-Fluid Objects | IEEE Journals & Magazine | IEEE Xplore
https://doi.org/10.1109/LRA.2022.3153728

A technique to teach bimanual robots stir-fry cooking
https://techxplore.com/news/2022-06-technique-bimanual-robots-stir-fry-cooking.html
炒め物を作る動作は、右腕と左腕のダイナミックな協調動作が必要で、ロボットどころか、料理人にとっても習得が困難な動きをしています。
研究チームは、この難しい動きをロボットに学習させるため、最初に人間のデモンストレーションを利用して「Structured-Transformer(構造化トランスフォーマー)」と呼ばれる両手協調モデルのトレーニングを実施しました。
論文の筆頭著者Junjia Liu氏によると、このメカニズムは調整を両腕の動きのあいだのシーケンス変換の問題とみなし、これを達成するために深層学習モデル・トランスフォーマーとGNN(グラフニューラルネットワーク)の組み合わせモデルを採用しているとのこと。
ポイントとなるのは右腕と左腕を別々に扱うというところです。ロボットの左腕の動きは視覚的なフィードバックにより調整、これと対応する右腕の動きは、左腕の動きに基づいて事前にトレーニングされた構造化トランスフォーマーモデルによって生成されるそうです。
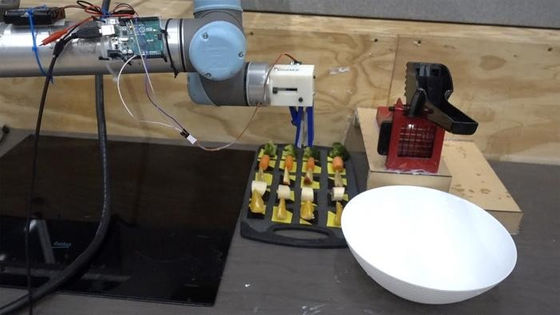
研究チームはシミュレーションおよびロボットアームで知られるPandaの両腕ロボットを用いてモデルのパフォーマンスを評価。テストを行うと、両腕ロボットは炒め物を調理する動きをうまく現実的に再現することができました。
Liu氏は「この論文が主に貢献するポイントは、シーケンス変換の形で、明示的に両腕ロボットの調整メカニズムを検討するところです」「デモンストレーションからの古典的学習や、深層学習・強化学習ベースの手法と比較して、私たちの分離フレームワークは、両方の手法を巧みに組み合わせています。前者の一般化と、後者の表現度、両方を持つことができています」と述べています。
将来的にはこのモデルによって、ちゃんとした調理ロボットの開発ができるようになる可能性があるほか、同様のアプローチで、2本の腕を使う他のタスクでもロボットをトレーニングすることができるようになります。Liu氏らは、モデルのパフォーマンスと一般的可能性を広げるため、開発を継続する予定だとのことです。
・関連記事
14台のロボットアームに分散自己学習させて人間が数年かけて覚える動作を爆速で経験して身につけさせる恐るべきムービーをGoogleが公開 - GIGAZINE
元Google技術者らが開発した「自由自在に動くアームで物体を持ち運べるロボット」の販売がスタート - GIGAZINE
2本のロボットアームを意のままに操り「阿修羅」のような姿になれる「MetaLimbs」 - GIGAZINE
あのボストン・ダイナミクスが商用物流ロボット「Stretch」を発表、吸盤付きロボットアームで物流を進化させる運搬ロボ - GIGAZINE
ロボットアームでボールを延々受け渡しする産業用ロボット感あふれる「レゴの玉運び装置:5つのリング」 - GIGAZINE
DeepMindが人間レベルにかなり近づいたAI「Gato」を構築、ゲームプレイ・チャット・ロボットアーム操作などが可能 - GIGAZINE
「ハサミを箱に入れる」「布を折る」など言葉で指示した多様なタスクをロボットアームで遂行するAIが登場 - GIGAZINE
・関連コンテンツ