福島原発でも活躍中の災害対応支援ロボットの後継機「Rosemary」を至近距離で撮影してきました

センサーやカメラを搭載して人が行けない場所で作業をするために開発されたロボット「Quince(クインス)」。このプロジェクトには千葉工業大学のほか、国際レスキューシステム研究機構、東北大学を中心とするグループが携わっており、現在既にこの成果をもとに開発された福島第一原発の事故現場や火山の火口付近などの場所で活躍しています。
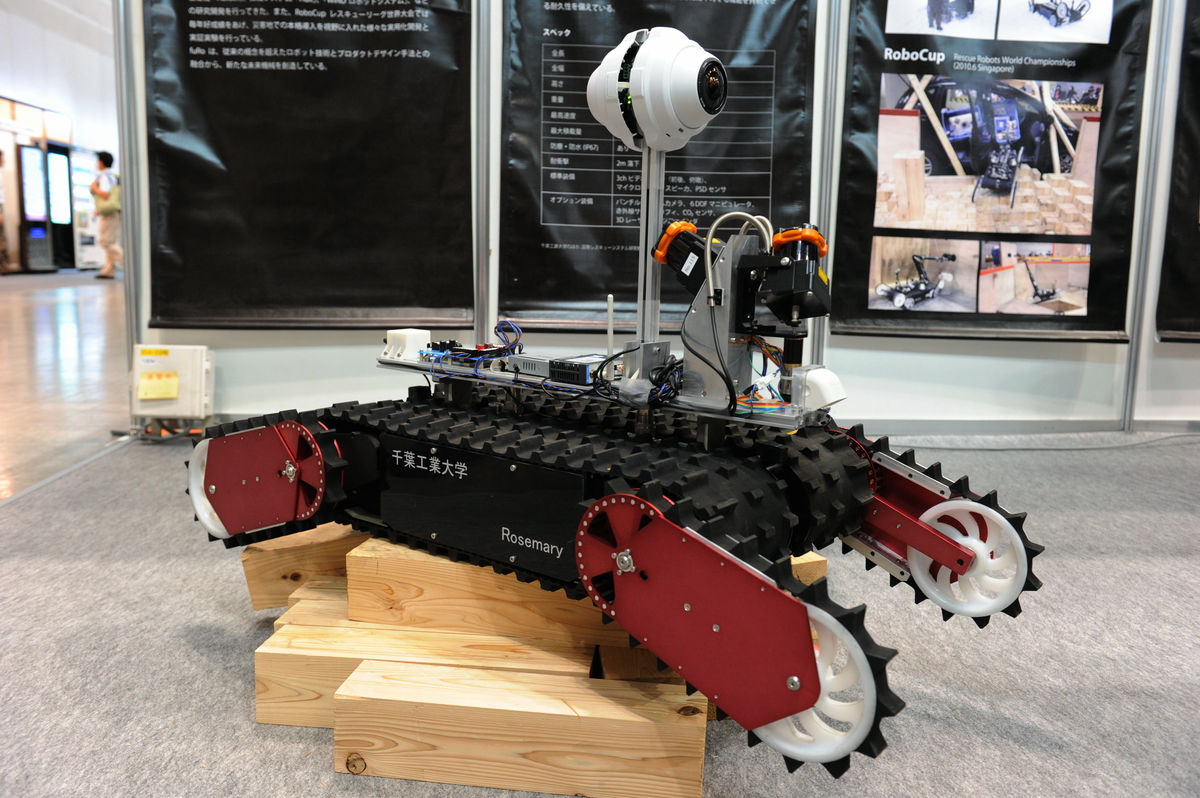
今回は、その「Quince」の後継機「Rosemary(ローズマリー)」が横浜で開催されている「ワイヤレス・テクノロジー・パーク2012」の会場に展示されていたので、間近で撮影してきました。
ブースの外観はこんな感じ。

展示を行っているのは千葉工業大学 未来ロボット技術研究センター fuRo(Future Robotics Technology Center)です。

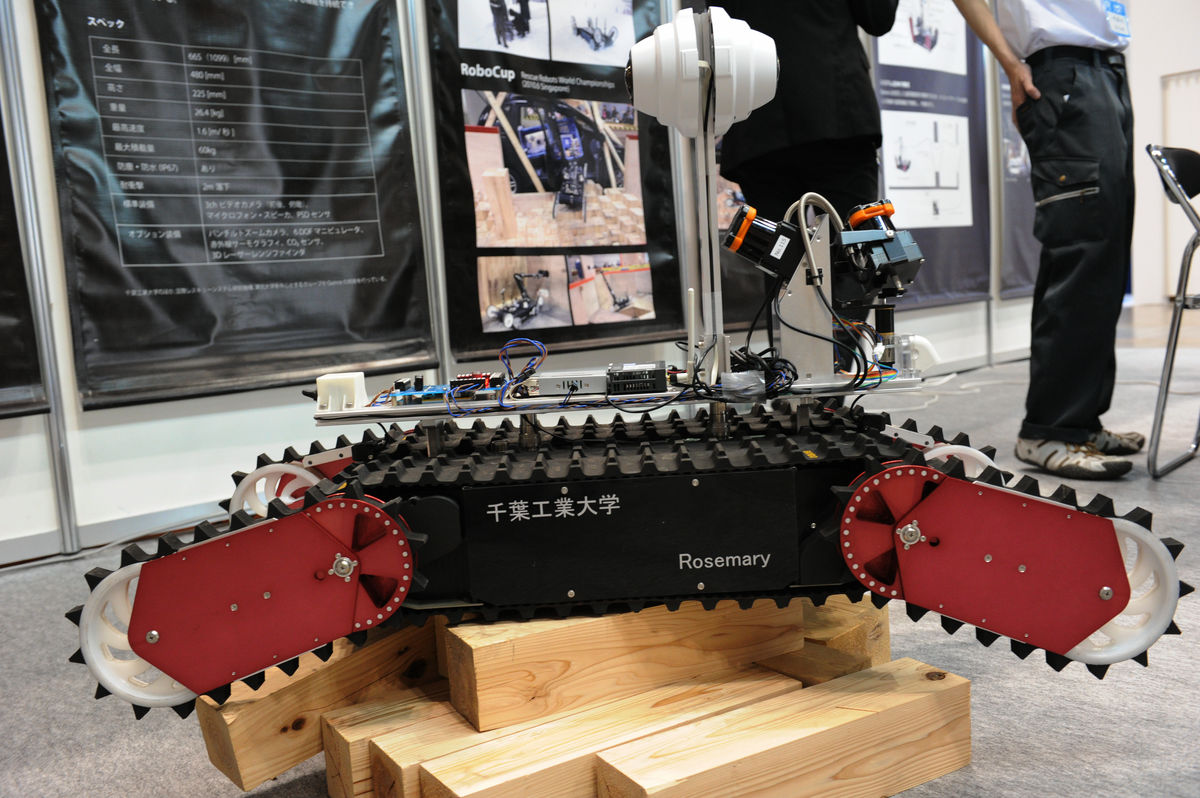
カメラ、センサー類などの突起を除いたロボットの大きさは全長665×全幅480×高さ225ミリ。隣に立っている人間と比較すると大型犬くらいのサイズであることがわかります。

ガレキを模した角材の山の上に鎮座。
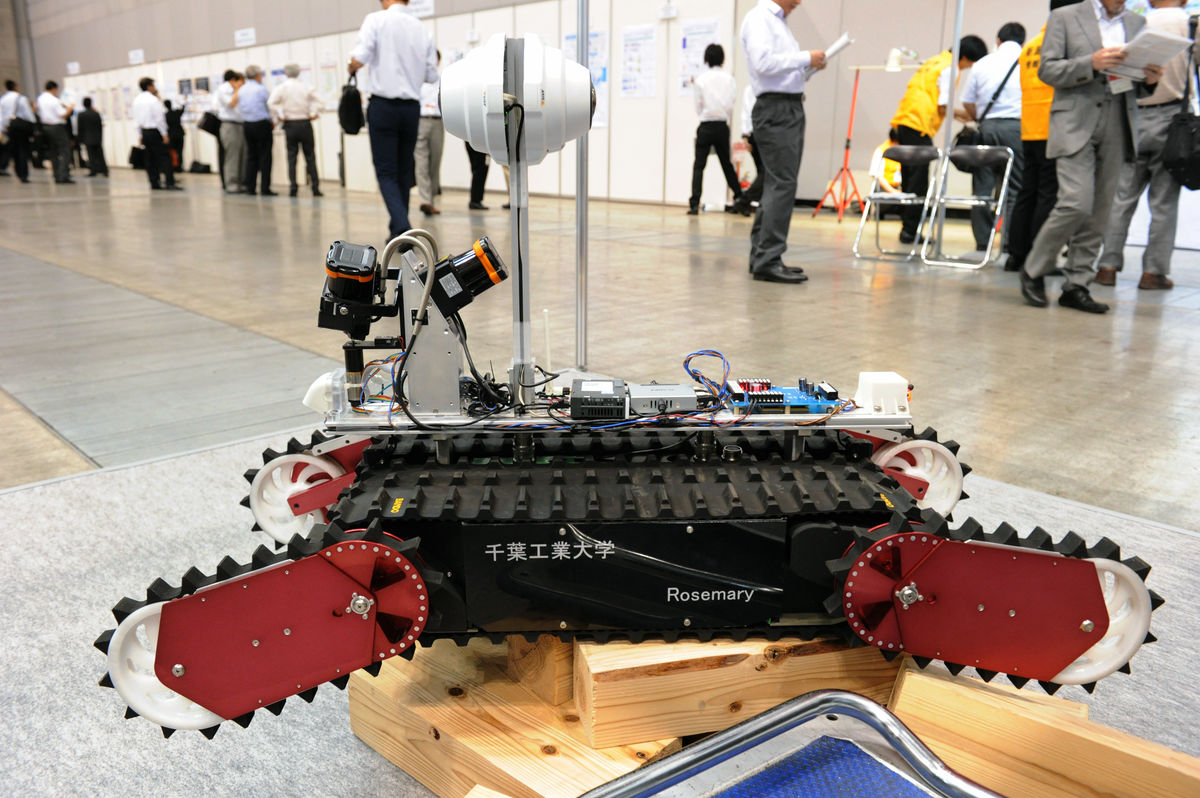
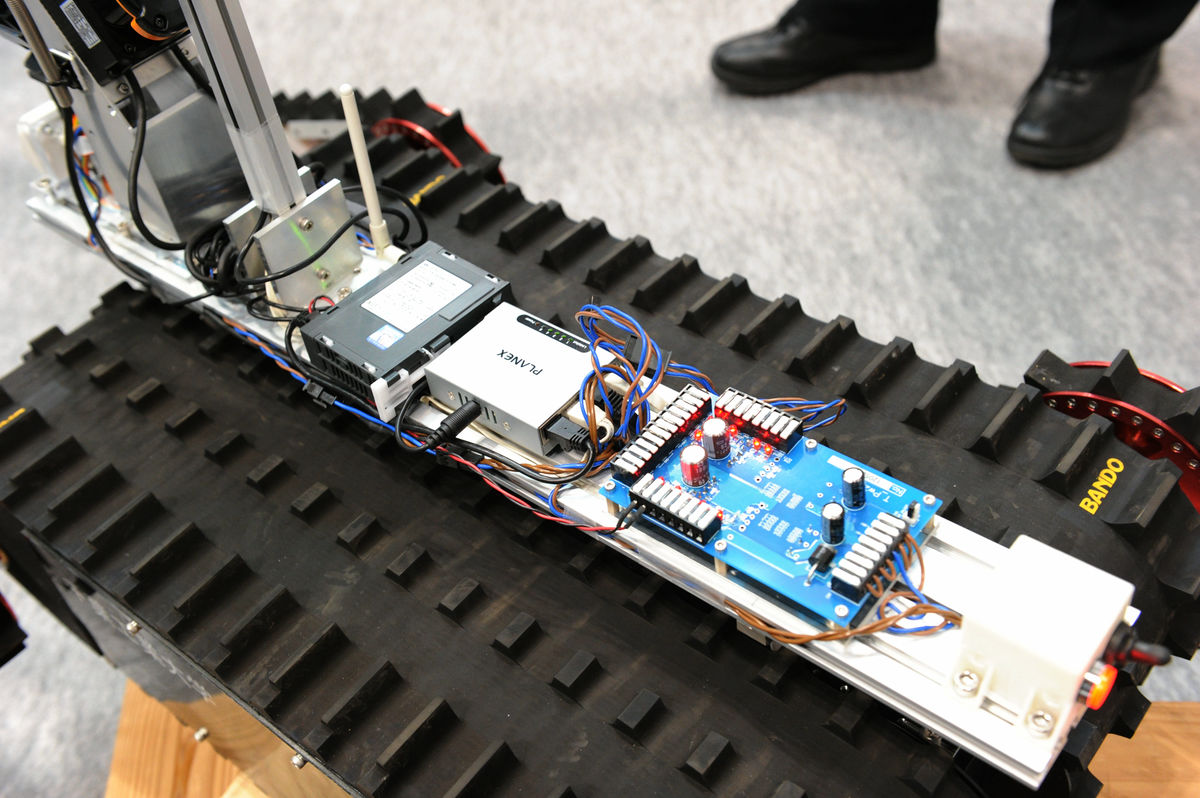
側面はこんな感じ。
正面は以下の通り。
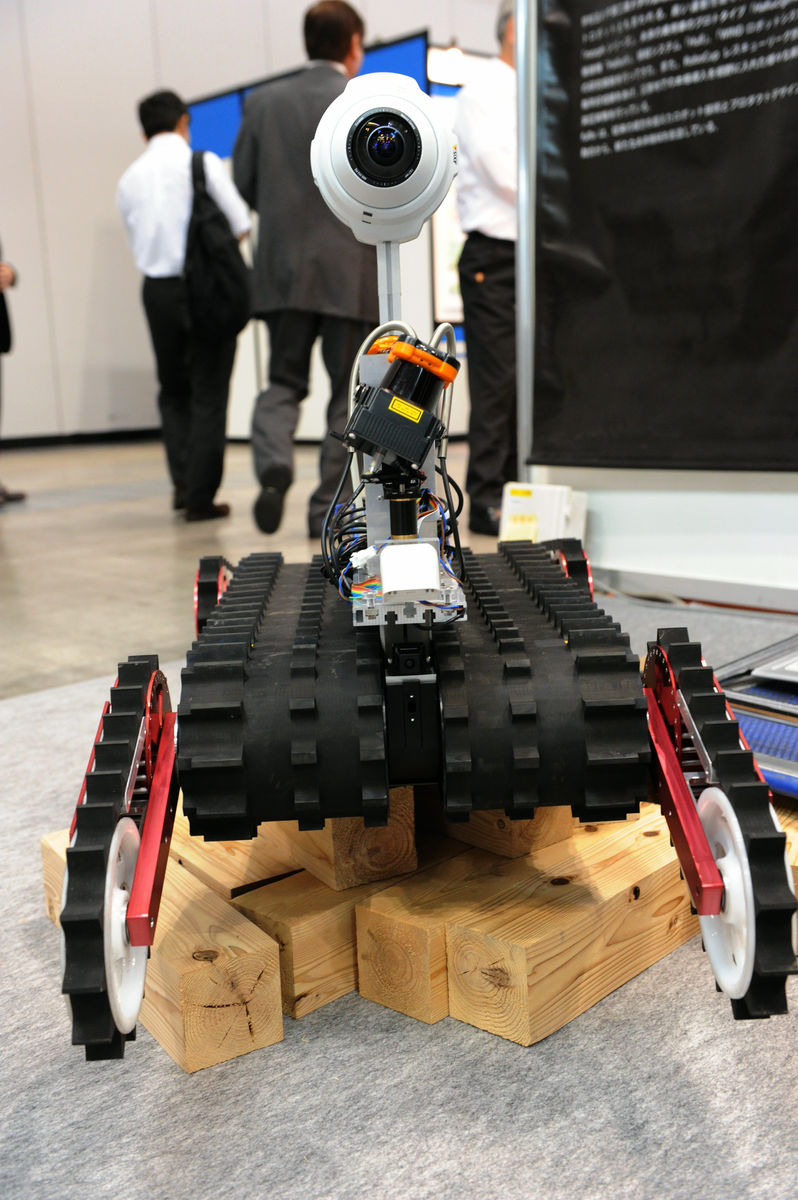
動物に例えると胴体にあたる部分に幅広の無限軌道(キャタピラ)があり、通常はこれを回転させて進みます。なお、最高時速は約1.6m/秒とのこと。
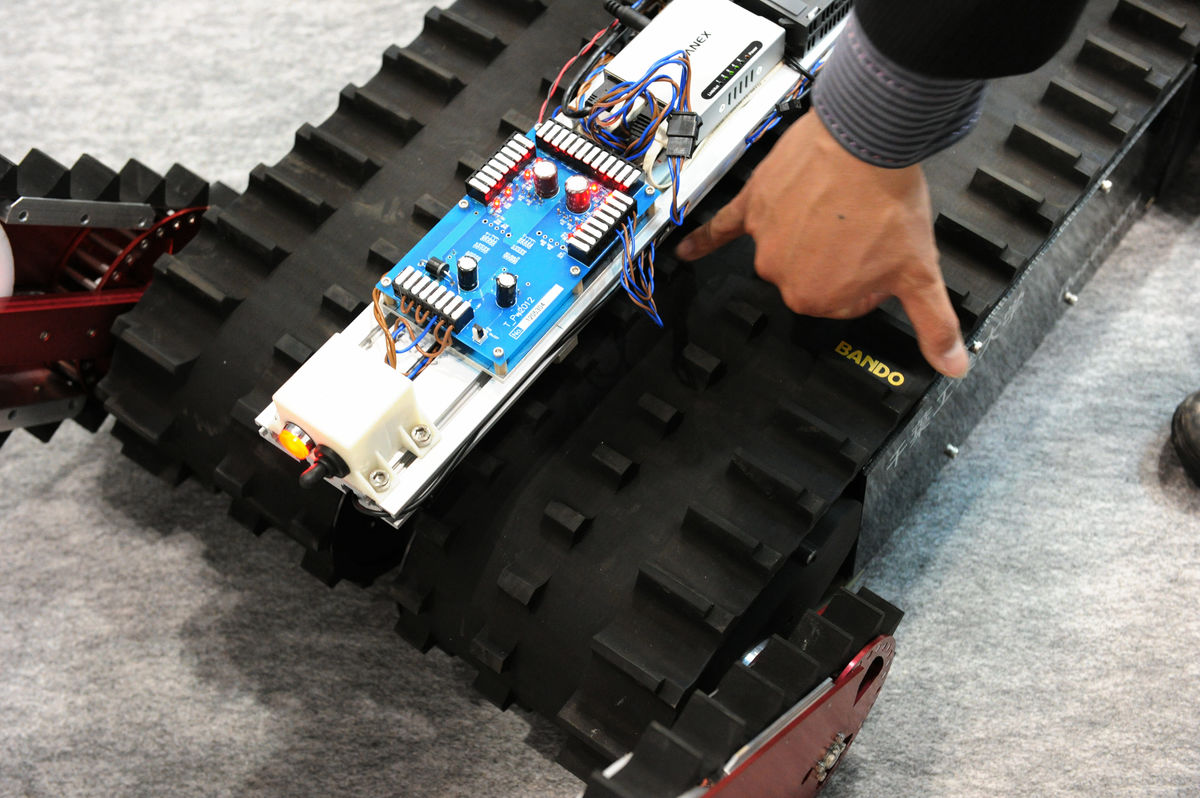
加えて手足のように飛び出した4つの幅の狭い履帯も備えており、この部品を上下させることで30センチ近い段差も難なく越えることができます。

で、実際に動いている様子はどんな感じか?というのは以下のムービーを見るとよくわかります。
災害対応支援ロボット「Rosemary」の動作ムービー - YouTube
背面にはセンサーなどを搭載することができ、60キロの装置を載せた状態で階段の上り下りができるそうです。
カメラを備えており、周囲の様子を鮮明に撮影することが可能。

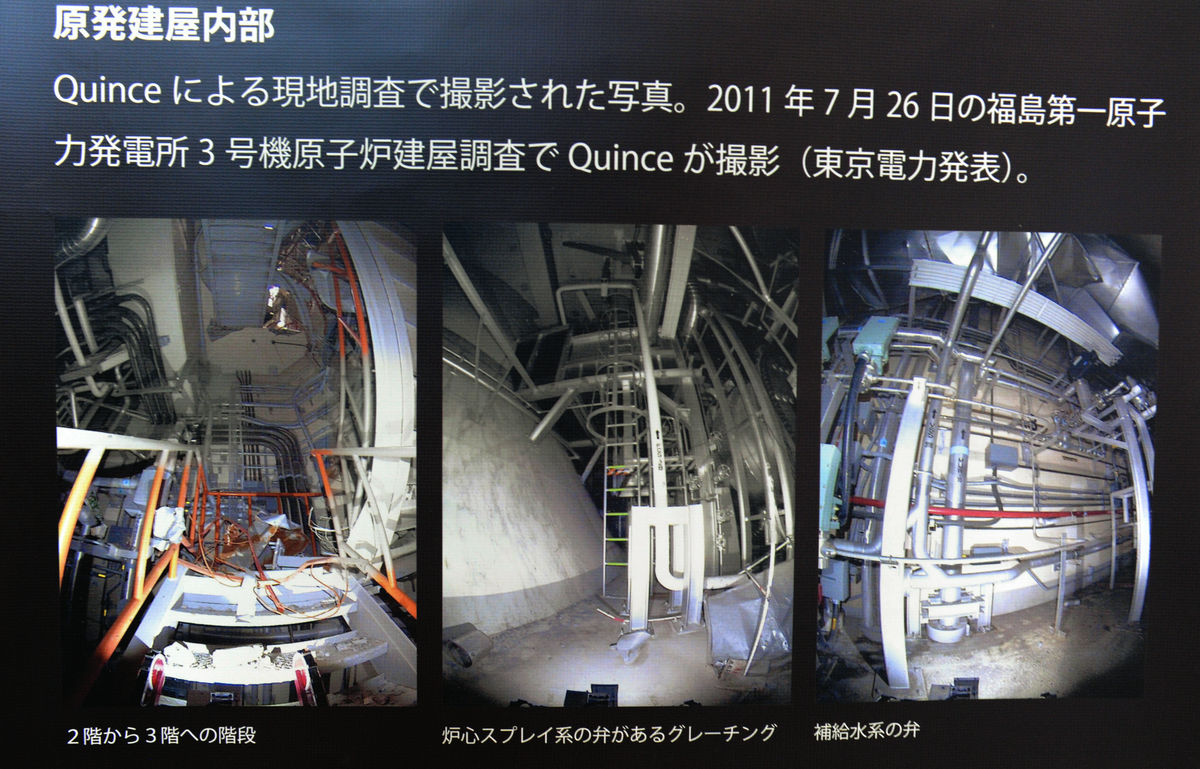
前モデルの「Quince」が福島第一原発の内部で撮影した写真は以下の通り。
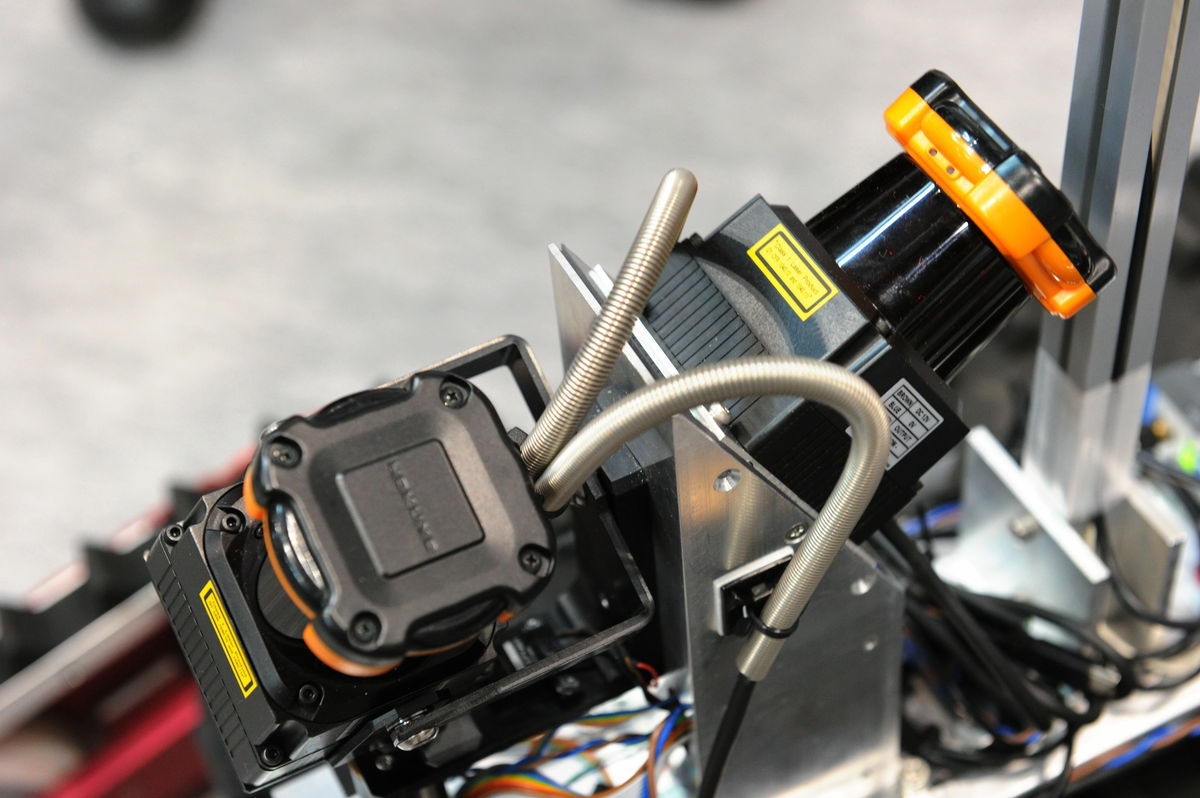
前方にはレーザーを使用して3次元マップを作成するためのセンターも搭載しており、走行するだけで周囲の地形を立体的に記録することができます。
操作には以下のようなコントローラーを使用。実際に触らせてもらったところ、プレイステーションなどのゲームで慣れ親しんできた操作感に近いこともあり、初めてでもまったく問題なく動かすことができました。

コントローラーはラップトップPCと無線で接続されており、以下のような画面を見ながら操作します。

実際にコントローラーを使用して動かすとこうなります。
災害対応支援ロボット「Rosemary」の操作はこんな感じ - YouTube
なお、福島第一原発の事故現場では放射能の影響で無線接続が使用できないため有線で操作しているそうですが、電波強度の強いアンテナと接続して一般的な環境で使用する場合には1キロ以上離れた状態でも動かすことができるそうです。さらに、人工衛星を経由して操作する実験にも成功しており、数秒のタイムラグはあるものの、実質的に距離は無制限で無線通信を行う事が可能とのこと。
2012年7月6日(金)までパシフィコ横浜で行われている「ワイヤレス・テクノロジー・パーク2012」に行けば実物を間近で見ることが可能です。
・関連記事
時速3300カンでシャリを握り、最高毎時400本で海苔巻きができるスシロボットたち - GIGAZINE
「乗れるロボット」が現実に、全長4mの鉄製ロボットが制作進行中 - GIGAZINE
超高速でルービックキューブを解くレゴ製ロボット - GIGAZINE
映画に登場しそうな超巨大ロボットハンド - GIGAZINE
NASAとGMが協力開発した人型ロボットの宇宙飛行士、ついに宇宙へ - GIGAZINE
・関連コンテンツ