Researchers for the first time succeeded in teaching 'a method of walking an unstable foothold' to a bipedal walking robot

Unlike robots with tires, unlike robots with tires, robots with feet can be advanced even in places with many obstacles, so it is thought that they are useful for disasters, but on the other hand development of algorithms to enable robots to walk on gareki and stepping stones It is difficult and difficult to navigate. Under such circumstances, researchers at the University of California at Berkeley and Carnegie Mellon University developed an algorithm that enables walking even if the distance between the stepping stones and the height of the stepping stone are different for the bipedal walking robot "ATRIAS".
Teaching Bipedal Robots to Step Across Discrete Terrain - IEEE Spectrum
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/dynamic-walking-on-stepping-stones
A biped robot that can proceed even if encountering an unpredictably fragmented scaffold enables disaster relief, space exploration, urban design designed for humans, and so on. However, although the mechanical design of the biped walking robot has developed in recent years, it can not be said that it has reached a practical level yet. Even with the latest robot, quasi-static movement is slow, it can not respond to unexpected obstacles, or energy efficiency is bad.
The same problem exists also in the exoskeleton type robot attached to the lower limbs, and many people who use the exoskeleton robot can not completely open both hands because it is necessary to walk in the divided scaffold.
Under such circumstances, researchers at the University of California at Berkeley and Carnegie Mellon University developed a new robot / application by designing robots and feedback algorithms. The new framework has a high degree of freedom, not only guarantees accurate footsteps but also features that it is strong against unexpected forces from the outside. In addition to developing our own robot using this framework, it was also simulated what happens when applying algorithms to existing robots such as "RABBIT" "ATRIAS" "DURUS".
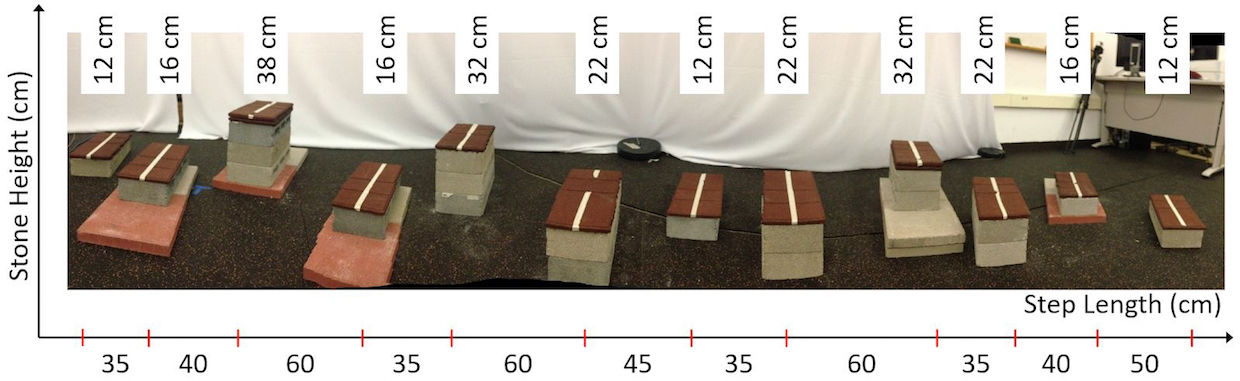
The scaffold used for the experiment is like this.
This is a video of a demo that adopted a framework with the biped walking robot " ATRIAS " actually developed by Dynamic Robotics Lab of the University of Oregon. ATRIAS does not inform you in advance what kind of situation the scaffolding you walk is. According to researchers, this is the first time that a biped robot successfully walked and walked at different scaffolds with different heights and distances.
Dynamic Bipedal Locomotion over Stochastic Discrete Terrain - YouTube
The biped walking robot has a system with high degrees of freedom controlled by complicated nonlinear differential equations. Since such a system constantly interacts with the ground and has to capture complex dynamics, it becomes very difficult to develop a "robot that moves complex scaffolds". Also, robots like ATRIAS do not have actuators on the ankles, so there are problems that only "keep walking" is necessary to balance, as when people are walking on stilts. In addition, elements such as torque limitation and friction in the motor are added, and "design of the process to control the robot" becomes very important.

On the other hand, the robot developed by the researcher is "blind" at the time of writing the article. Therefore, as a next step, researchers are trying to integrate algorithms such as deep learning in order to give information on the surrounding environment to the robot. It is believed that robots can estimate surrounding environments and fully automate the system. According to researchers, the bipedal walking robot "Cassie" like an ostrich will soon arrive at the University of California, Berkeley, and it is likely that the experiment will be conducted.
Cassie - Next Generation Robot - YouTube
Related Posts: