A robot that reproduces natural creatures such as bats and "spiders escaping from backward movement" in a surprisingly realistic manner

A German company that is doing a robustly robust (?) Robot that surprisingly reproduces the movements of living things mechanically, but has practically no practical use, "Festo"We are announcing new robots that reproduce bat and spider movements. The bat flying in the sky by actually flapping its wings, and the spider running and running backwards rolling in the middle of escape is reproduced splendidly by the kind of movement that makes a unusual way of running.
BionicFlyingFox | Festo Corporate
https://www.festo.com/group/en/cms/13130.htm
Festo's New Bionic Robots Include Rolling Spider, Flying Fox - IEEE Spectrum
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/festo-bionic-learning-network-rolling-spider-flying-fox
Festo who made this robot is a pneumatic equipment maker worldwide based in Germany. The company recreates the movement of the natural world with machines and ties it to automation technologyBionic Learning NetworkWe are doing research on butterfly robots that have surprisingly realistic reproductions of butterflies, jellyfishes, penguins etc. are made. The state of the bat robot made by such Festo is from the following movie.
Festo - BionicFlyingFox (English / Deutsch) - YouTube
An object hanging from the ceiling of the building.

If you look closely, the bat's robot hanging with its wings folded. You can see that the circumference of the face is also made real.

Then, spread the wings ......

Furry and fall

And do not you just fly like a real bat by moving the wings immediately?

It is like a real bat that the two front legs spread out and the wings fluttered and the two back legs balance.

The reason why it looks real is on the movement of the wing no matter what. Like a real bat, when lifting a wing fold the part from the joint ... ....

When swinging down the wing downwards, the wings are widened as much as possible so that the air can be received altogether.

This movement is reproduced by a plurality of motors and link mechanisms embedded in the main body.

By controlling the movement with two small motors and one brushless DC motor and conveying the force via a more complicated link, it reproduces a complex movement like a real bat.
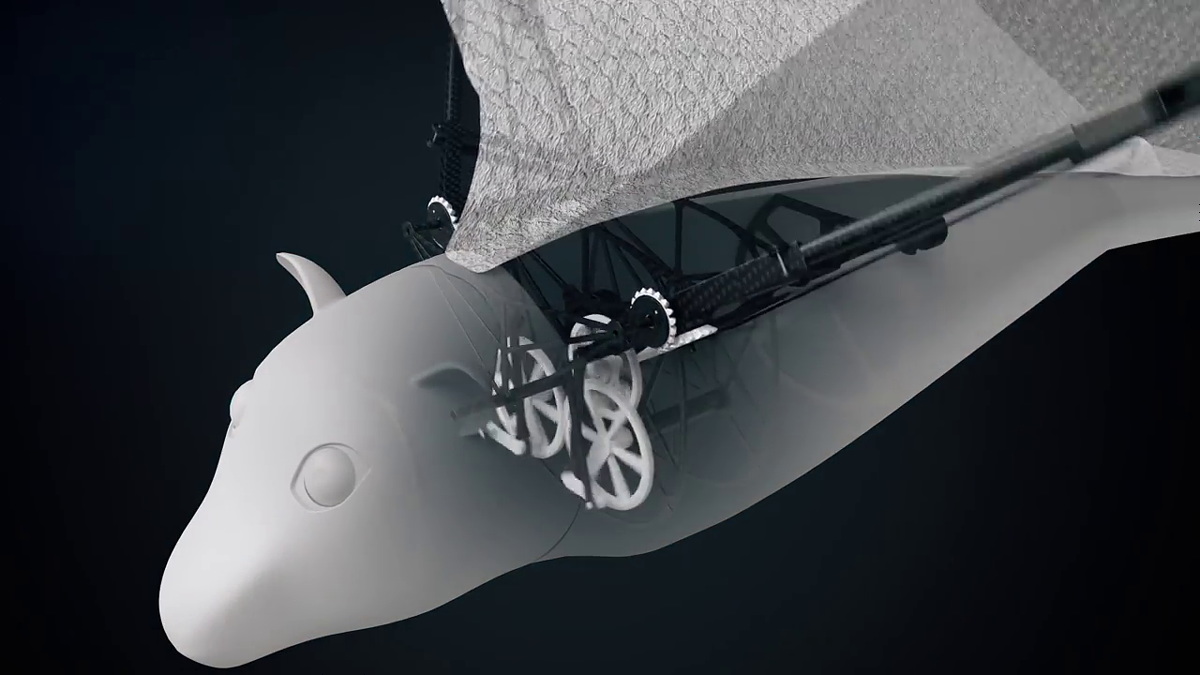
If you look carefully, you can see that the skeleton that the "fingers" in the wing evolved is also realistically reproduced.

While this bat is a huge body of about 80 cm in length and about 2 m in total length, the weight is about 500 grams and it is very light weight. The wing is a thin, strong, wrinkle-resistant structure by sandwiching fabrics made of elastic fiber "elastin" with two super lightweight ultra thin films and welding at 45,000 places It is said that it is made.

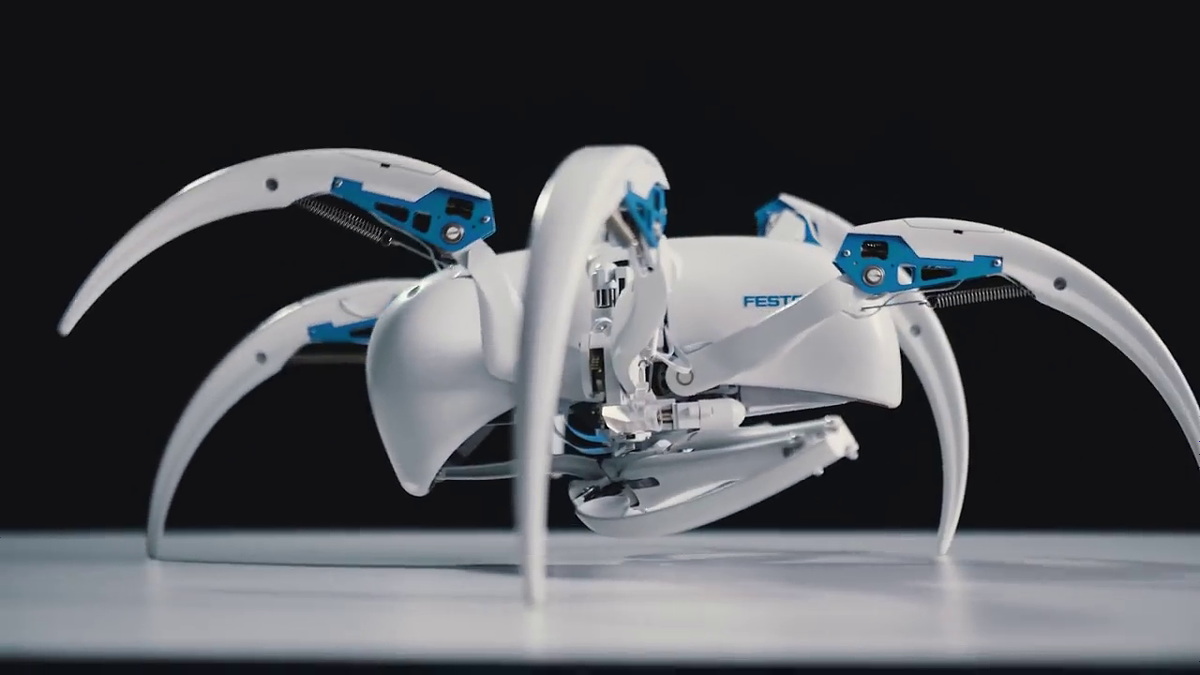
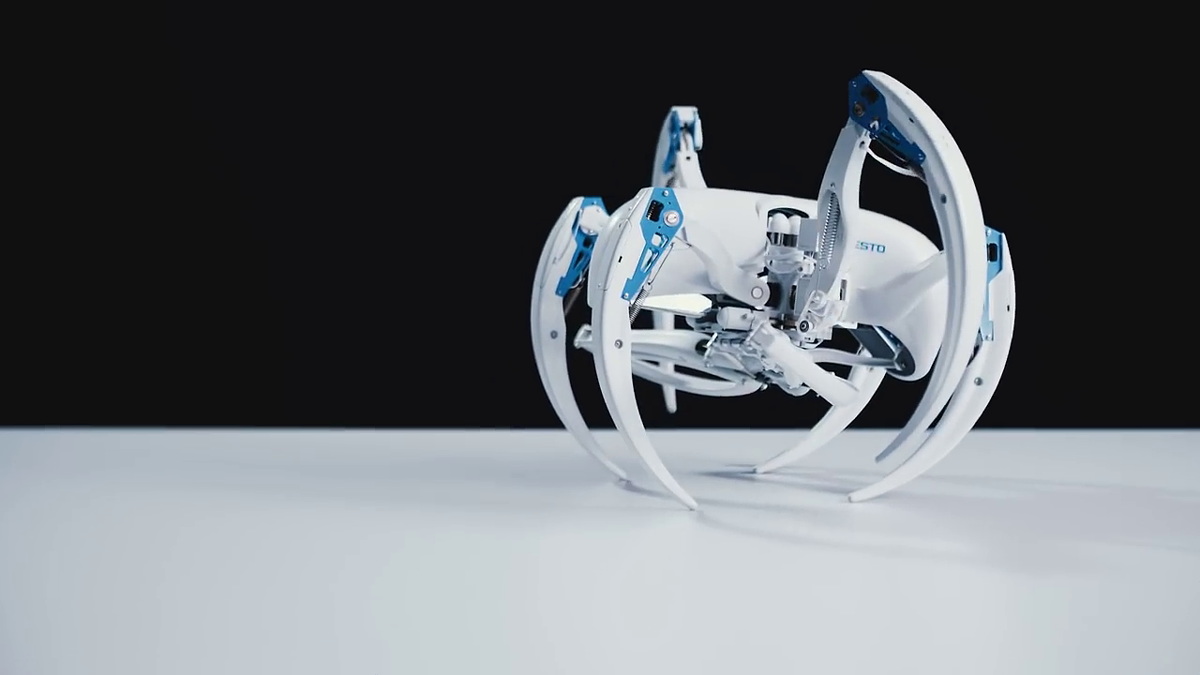
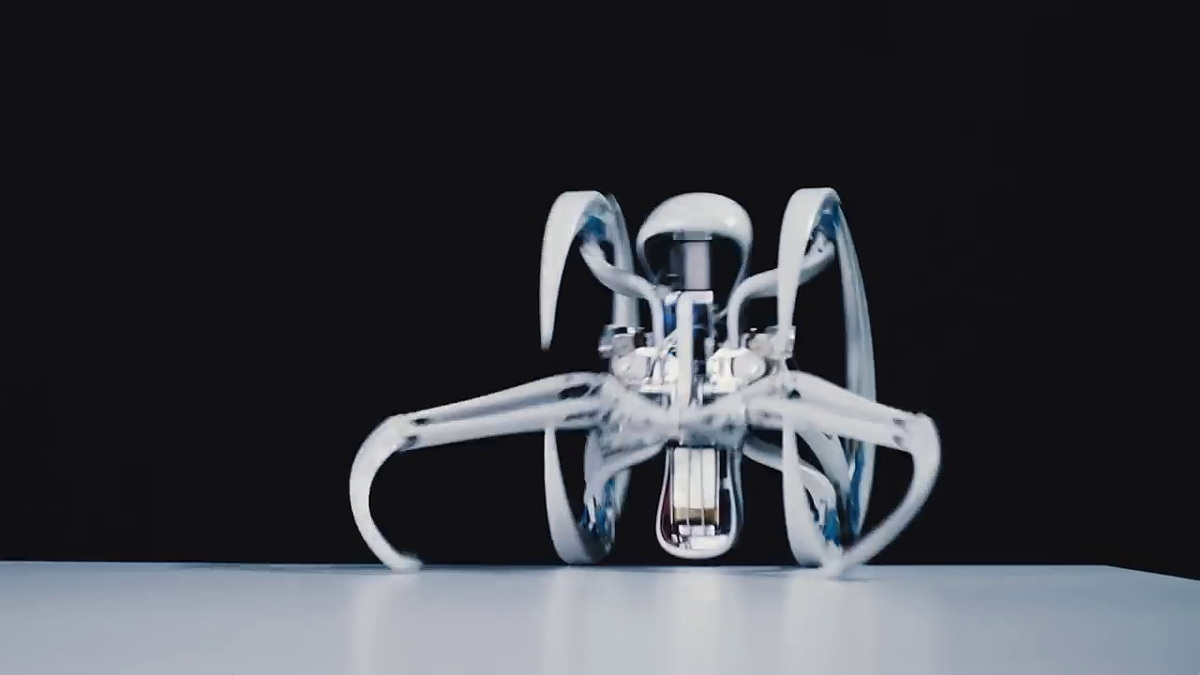
On the other hand, spiders flee while rolling back when they perceive danger "Cebrenus · Reikenbergi"The robot which reproduced the movement is kore. By folding the legs into a spherical shape, it is designed to turn around with Krunkulun.
Festo - BionicWheelBot (English / Deutsch) - YouTube
A spider, Cubreneus / Reikenberg, inhabiting the Chevy dunes in Morocco shows unusual movements when escaping from danger.
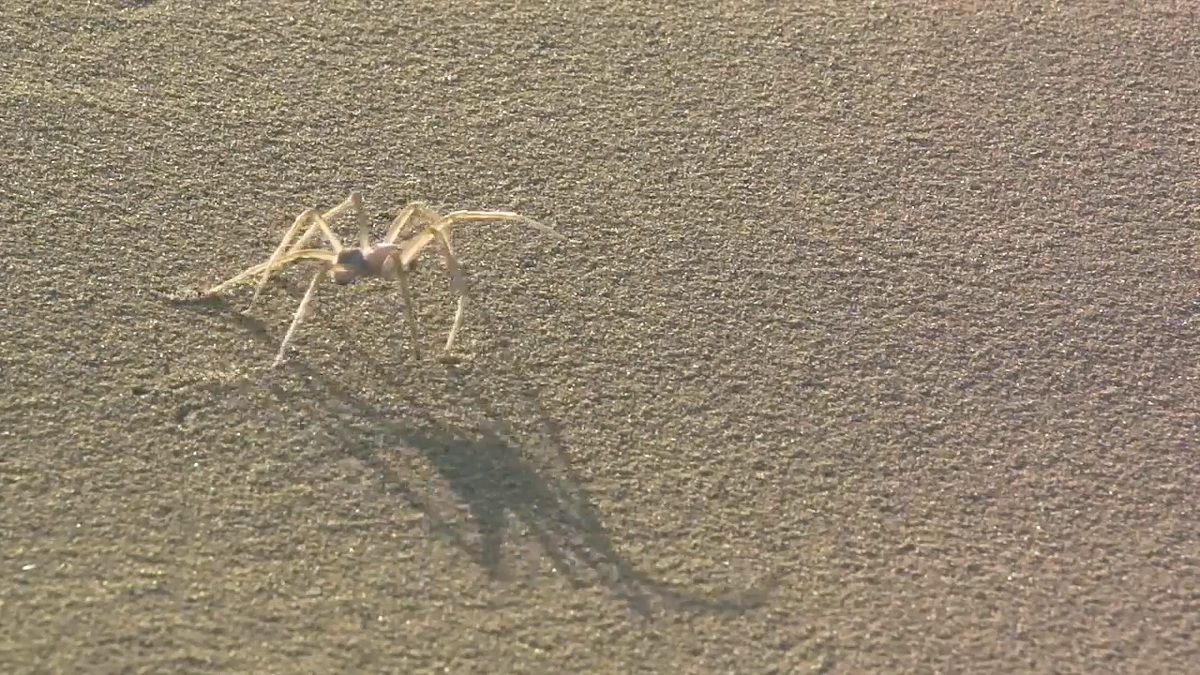
It is difficult to understand with still images, but now the spider is turning over with its back facing the ground. The spider's feature is to keep away from danger while squatting back so that acrobatic teams show intense movement.

It is this robot that reproduces such movement.
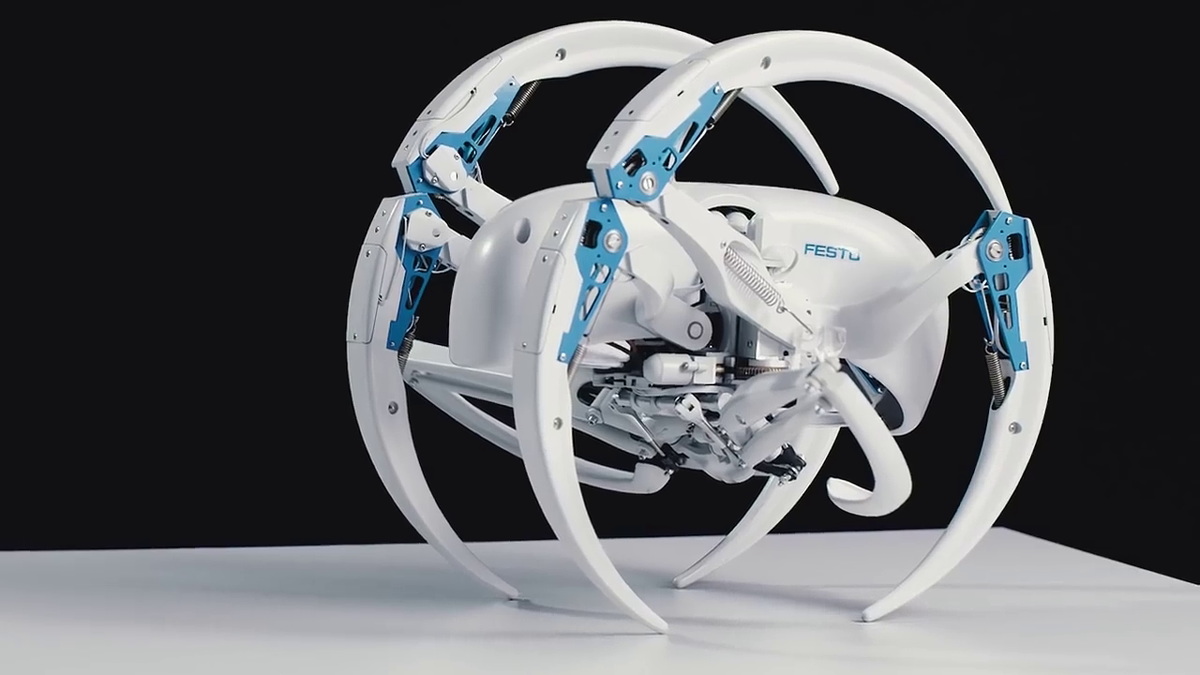
There is a mecha-sounding atmosphere in the base and joints of the legs.
Pointing the button on the tablet ......
I stood with 8 legs spread out.

I can also walk normally as it is ....
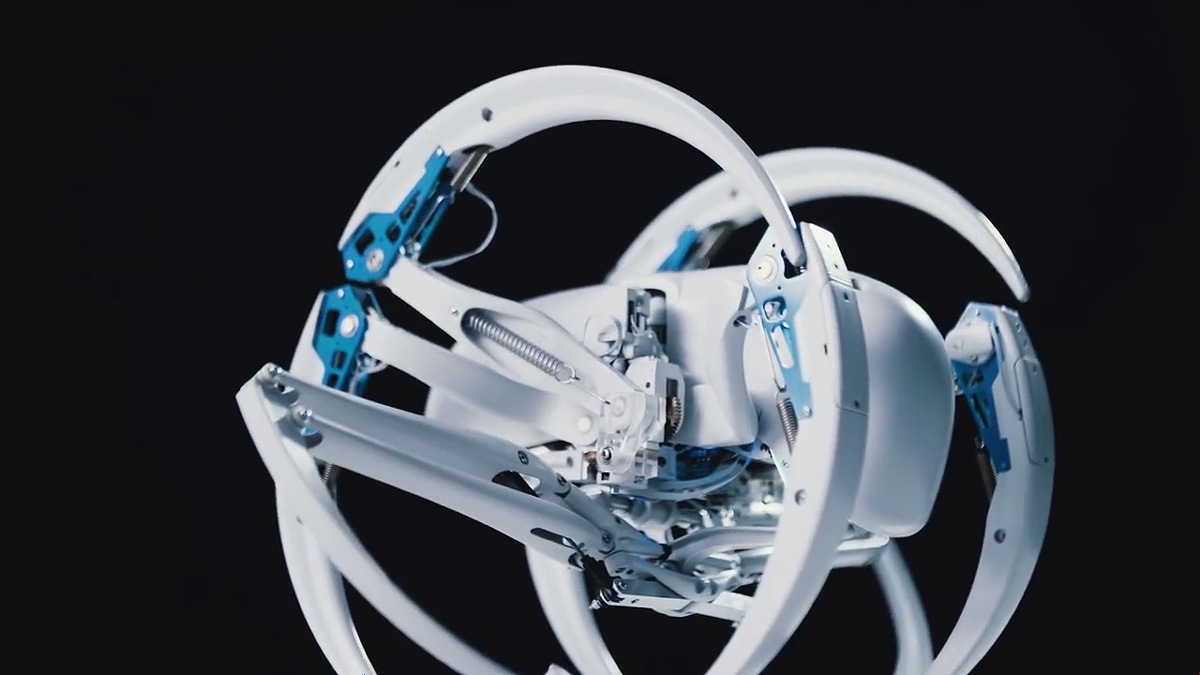
The main point is from here. First, fold the two legs ...
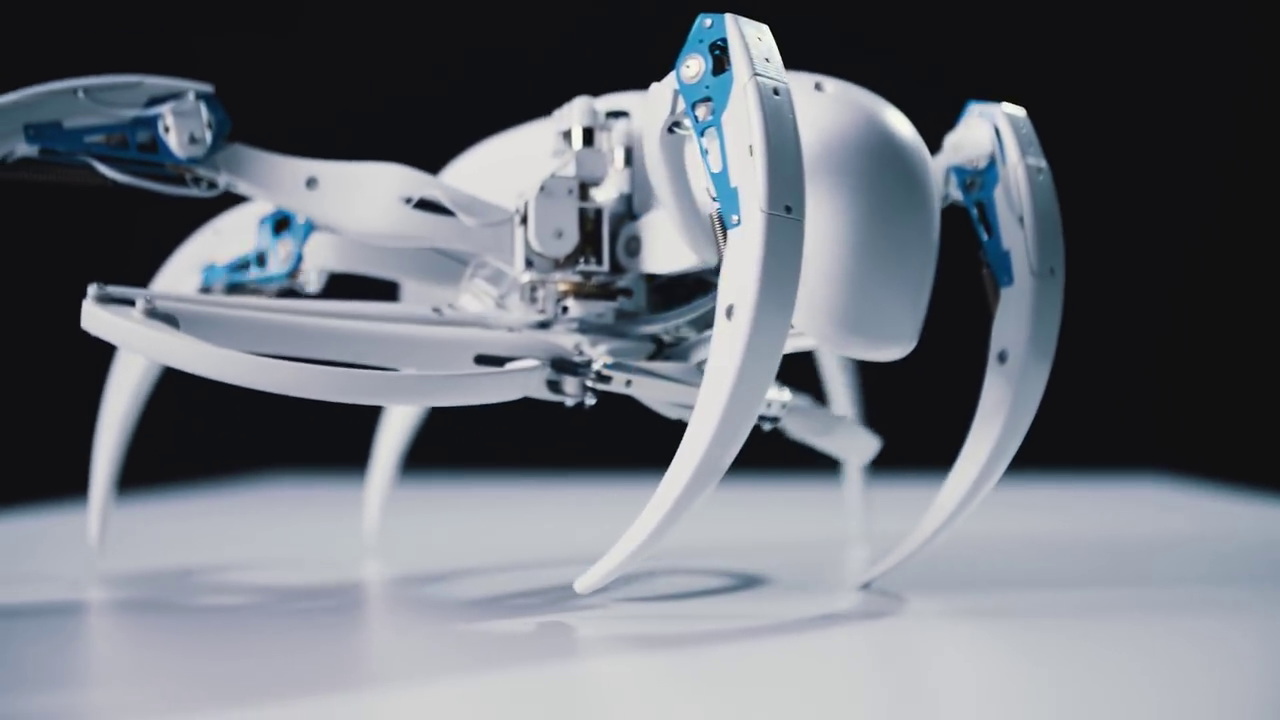
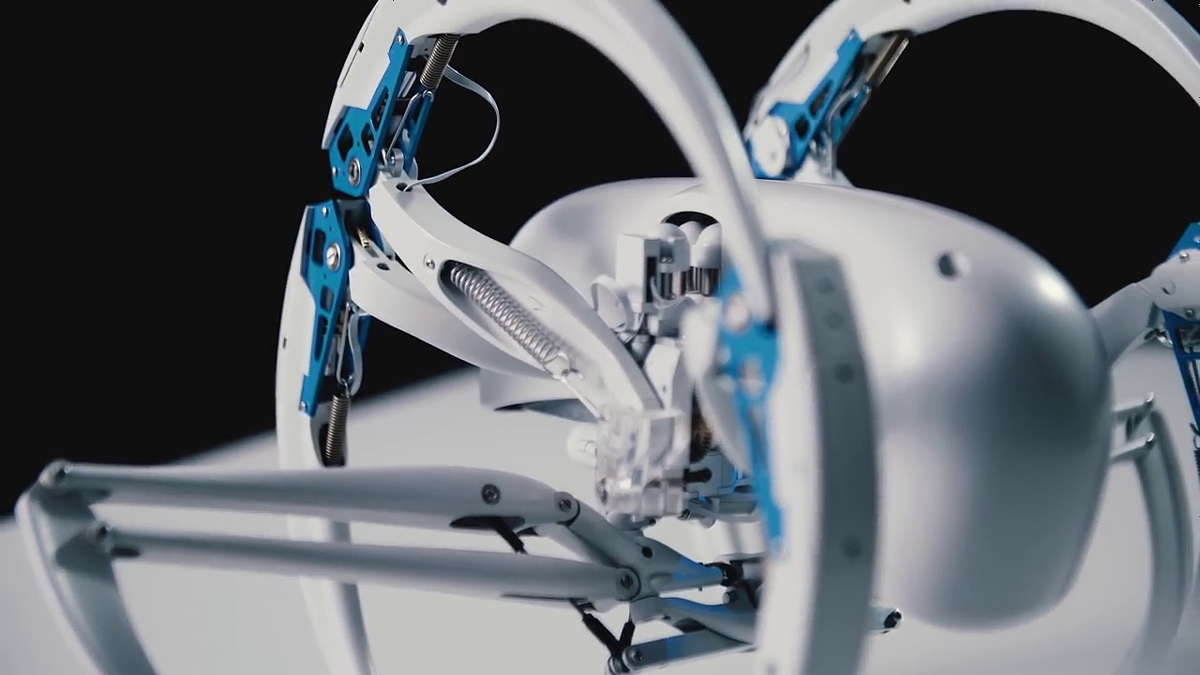
Then fold the other leg.
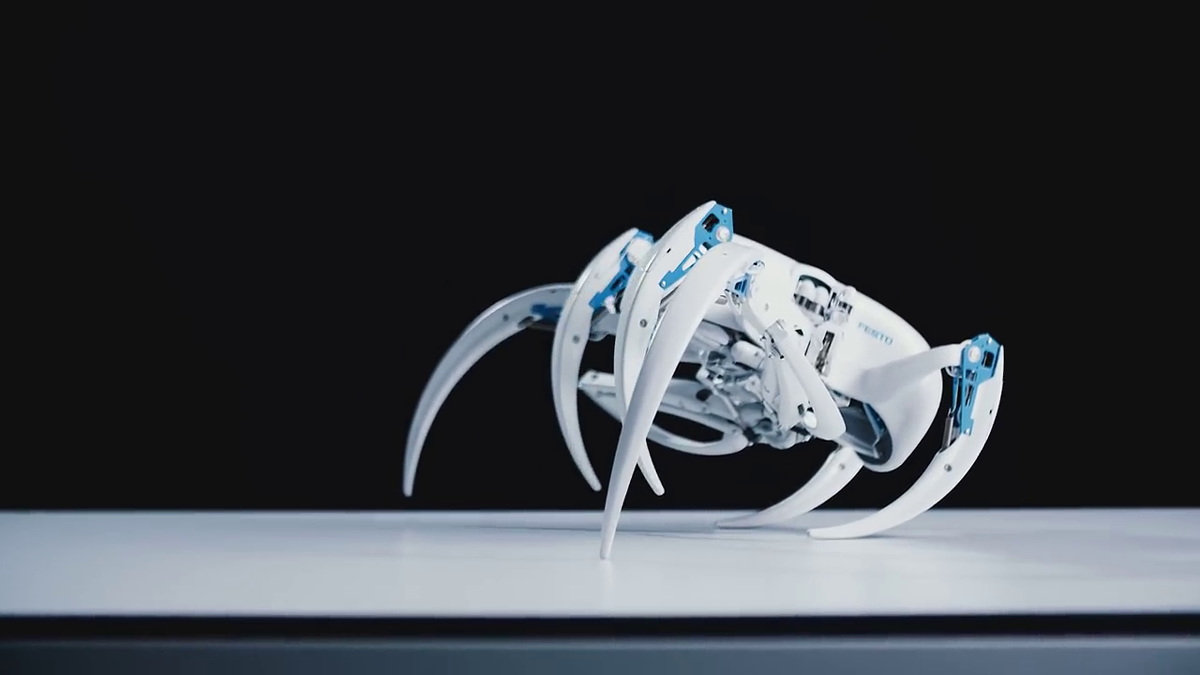
The place where the lower half became a sphere.
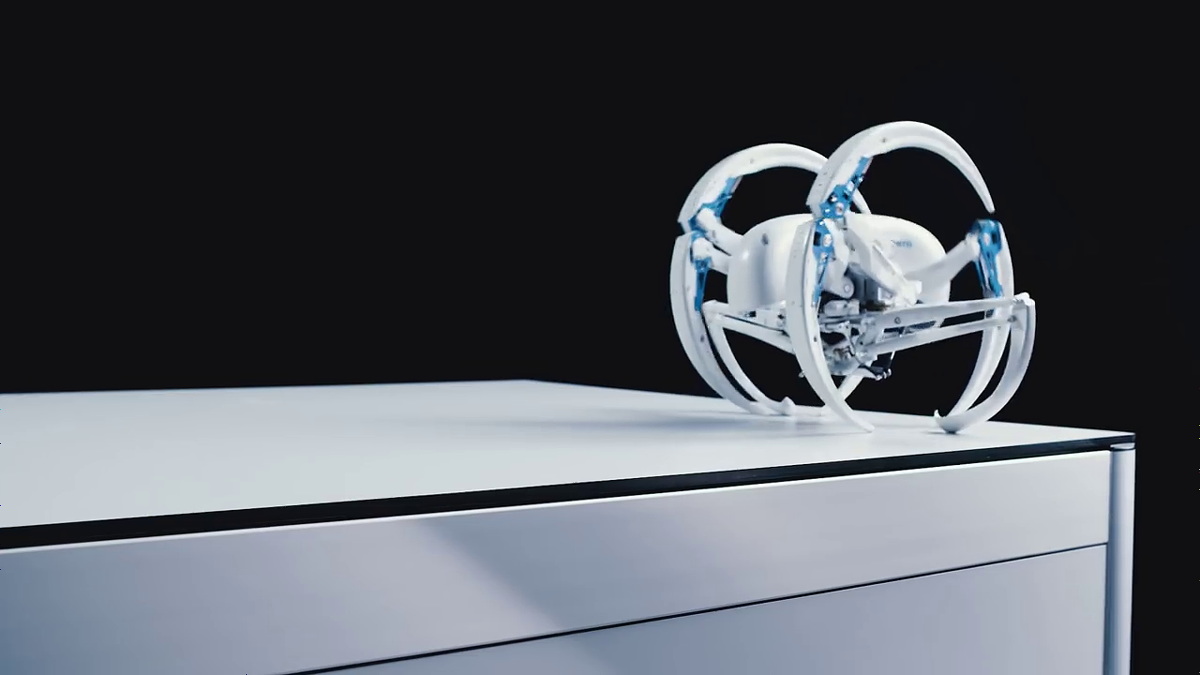
And when bringing the third pair of legs over the body, a structure like a tire was made using three pairs of feet.
And in this state, kicking out the ground with the last 4th pair of legs ......
Grin and rotate
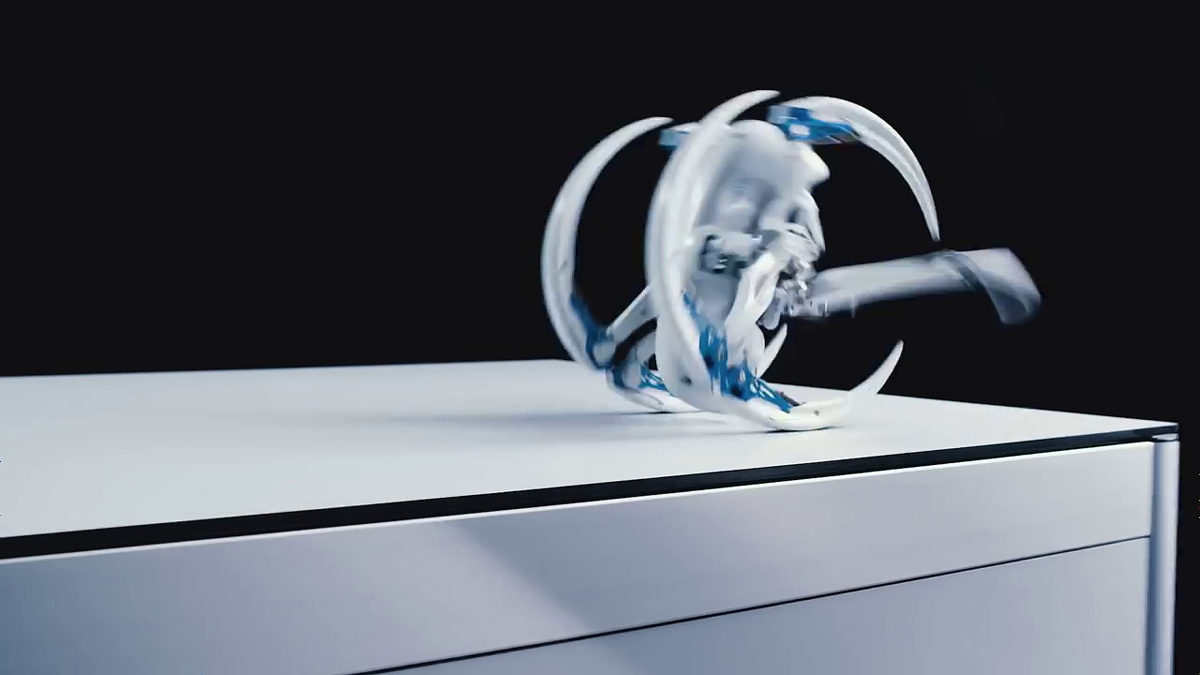
Although it is a little different movement from the real Quebrés · Rekenbergi, it certainly reproduced the appearance of escaping while squatting back.
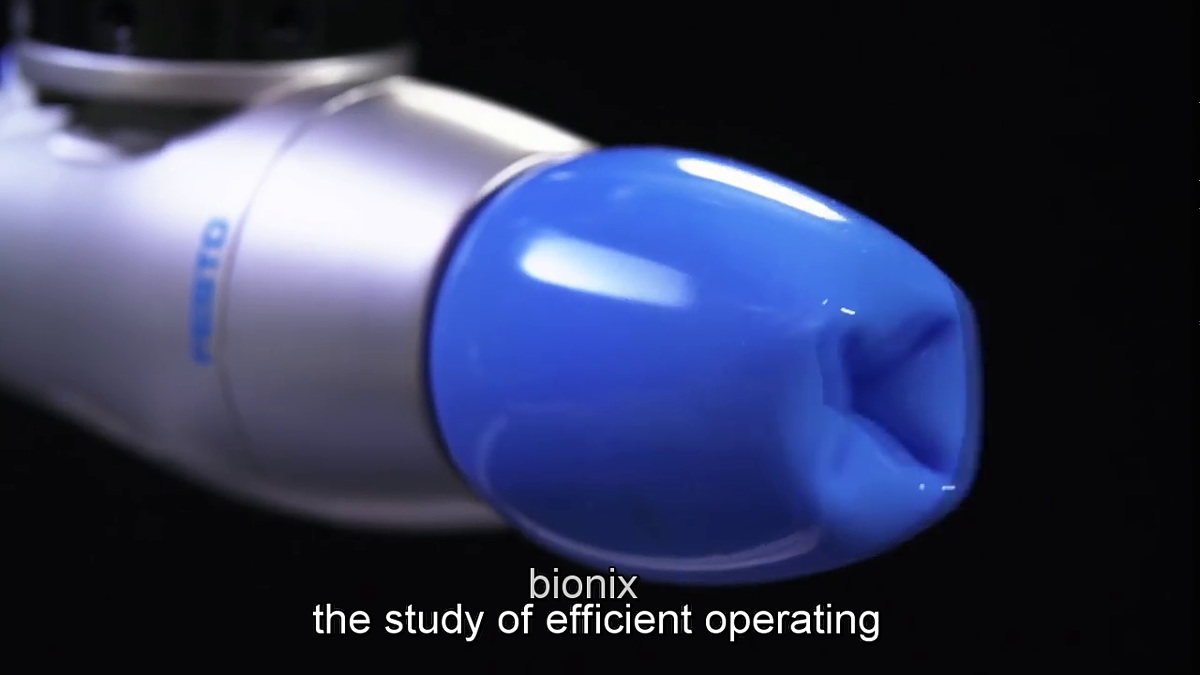
Festo said that he is advancing research on machines that reproduce the movement of such living things. In this way, the robot arm using the octopus sucker mechanism ... ...
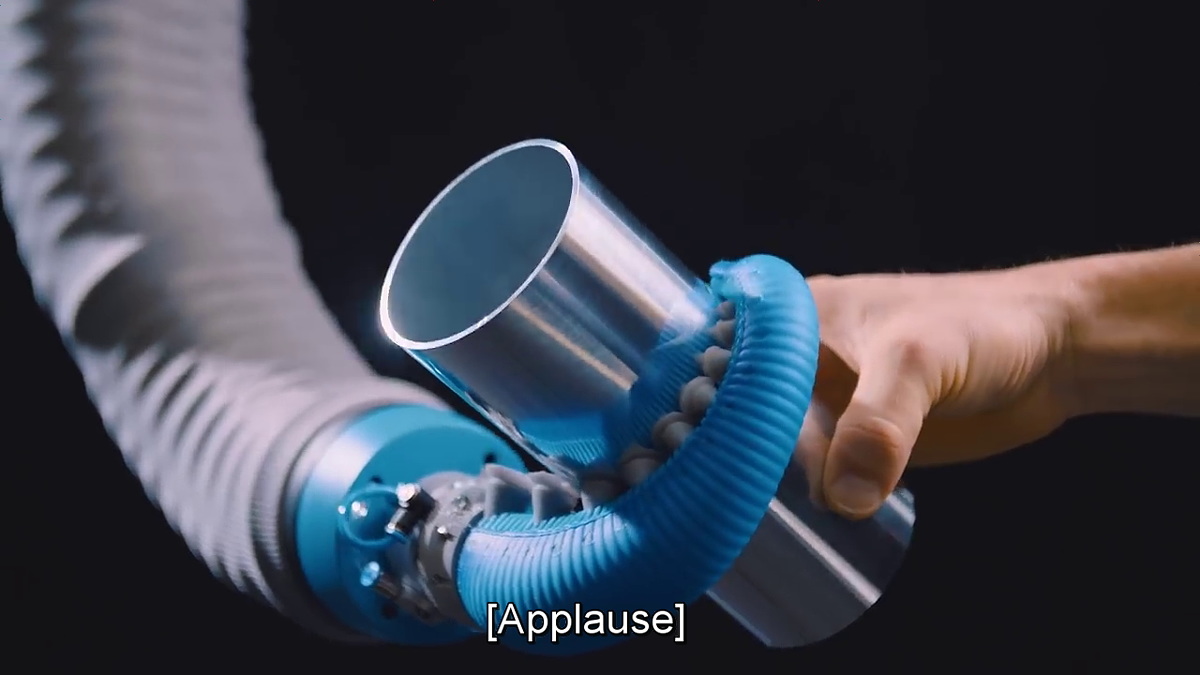
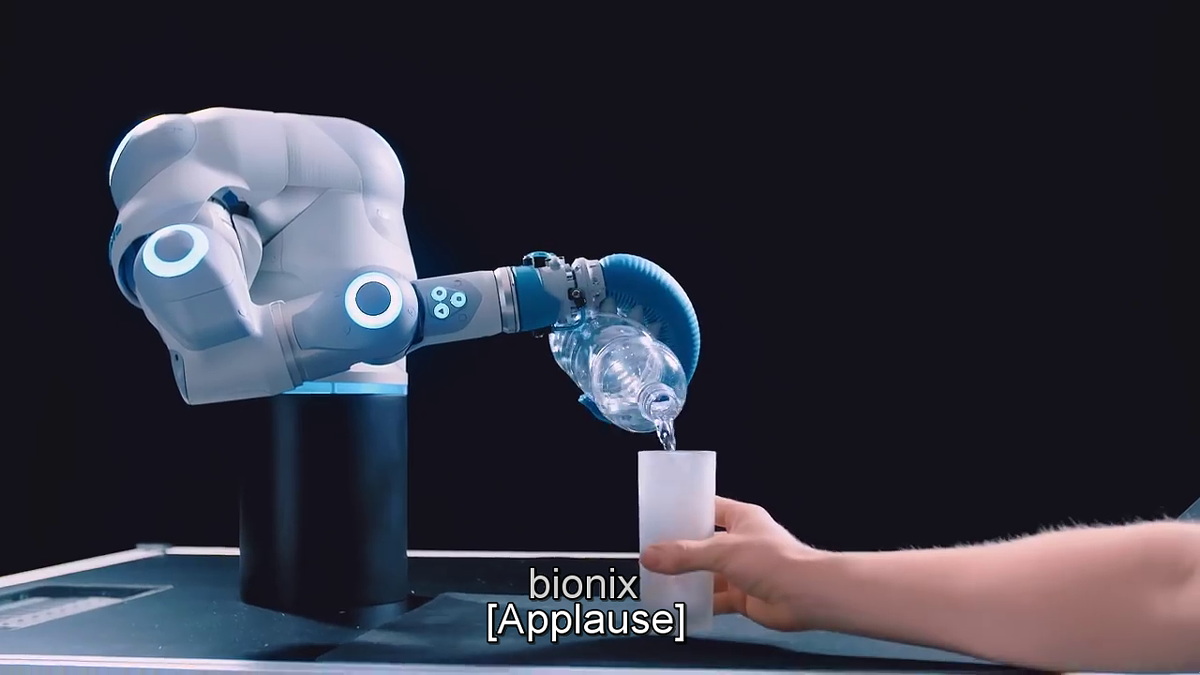
Devices that grab holders and so on by developing a soft protruding part in a recessed way are being developed.

Festo also creates robots such as dragonflies, butterflies, butterflies, ants, jellyfishes, etc. and makes them public. In the following movies, you can see where you explain how to use such robots to reproduce living creatures in engineering to children.
Festo - Bionics 4 Education (English) - YouTube
Related Posts:







