"Technique for self-creating method of walking with remaining legs even if the robot breaks his leg" is under development
Robot technology continues to evolve at a remarkable rate and helps family chores and so on within a few yearsHome robotIt is said to be born. The robot will not be able to move because it is decided to break down because the program is decided, but the robot applying the insight to remember how to walk with the remaining foot of the foot that left the foot is "Technology to instantly learn how to walk with broken legs"Has been developed.
Robot With Broken Leg Learns To Walk Again In 2 Minutes - The Physics arXiv Blog - Medium
https://medium.com/the-physics-arxiv-blog/robot-with-broken-leg-learns-to-walk-again-in-2-minutes-40b8f24bd26
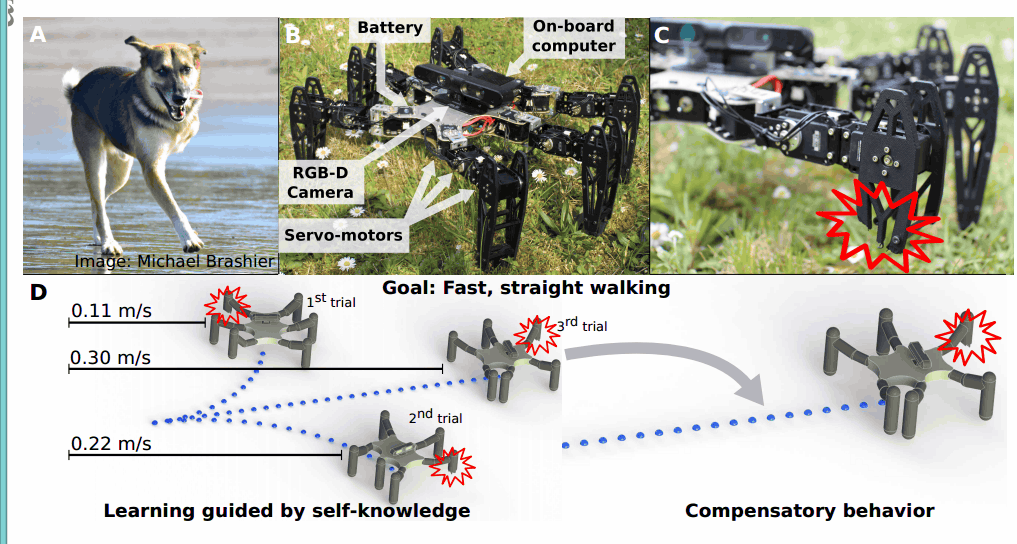
Robots with legs instantaneously calculate the angle, speed and acceleration of bending each leg and each joint, and calculate the amount of force on the ground contact surface, etc.ActuatorI am walking on it after measuring with. Because the parameters set for each are vast and complicated, the problem when the robot gets damaged by the robot is very serious. thereSorbonne UniversityAntoine Curry and others research team developed technology to walk the robot injured legs again in just tens of seconds. The technique of changing the parameters of the robot's broken leg and the operable leg to attempt walking which allows walking while the leg is broken and learning and optimizing the optimum walking pattern within tens of seconds to 2 minutes Developed.

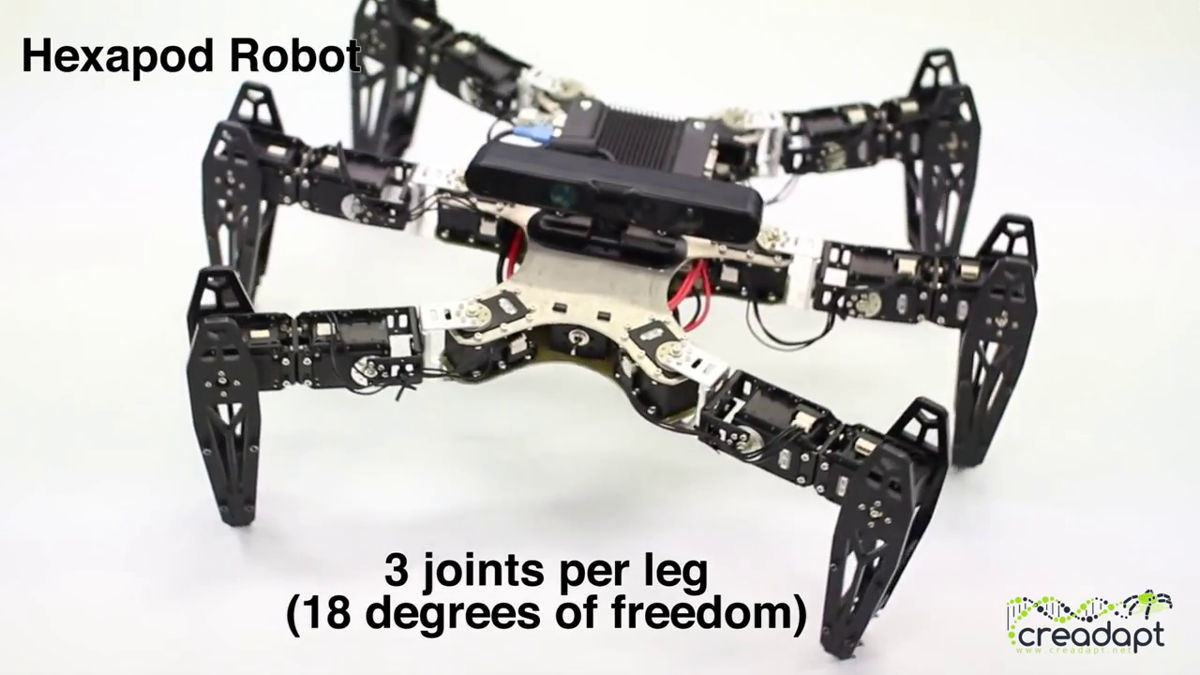
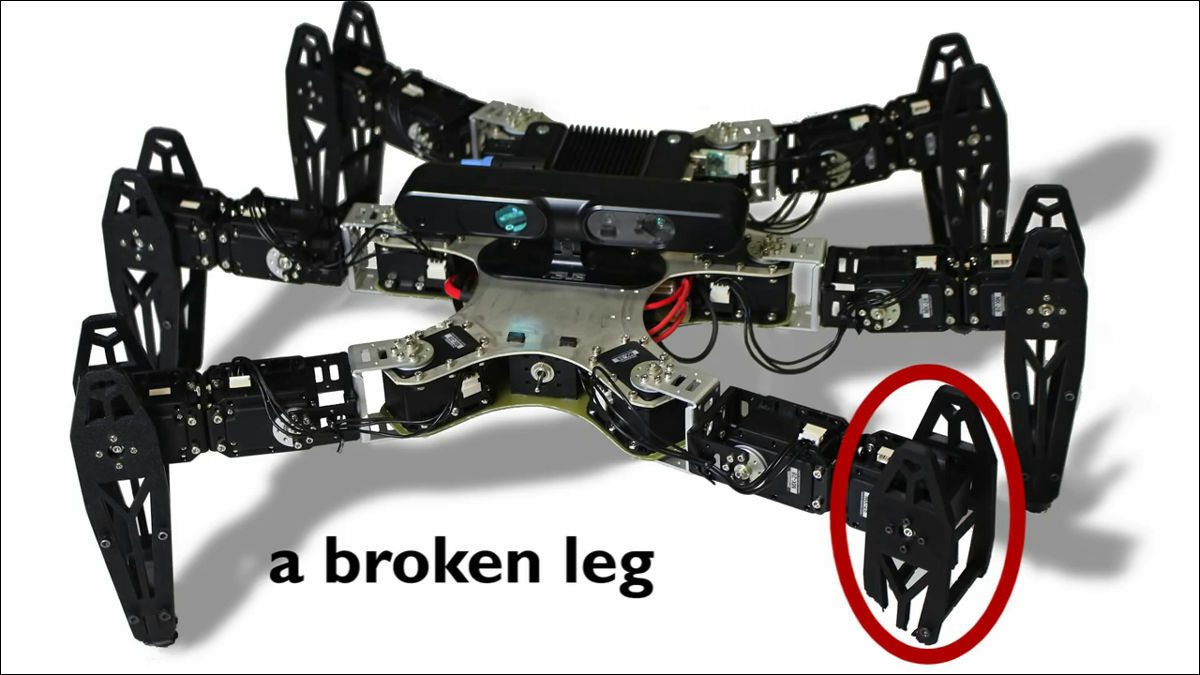
The research team conducted an experiment with a robot imitating six legged insects called "Hexapod". Hexapod has 18 motors on 6 legs, andOnboard computer, Depth camera is carried. There are 13,000 different walking patterns in the robot, and we create a pattern that we can walk as fast as possible with the remaining legs when the legs are damaged.
You can check the experiment movie that Hexapod actually walks with broken legs and finally starts walking straight.
Supplementary Video S1 for "Robots that can adapt like natural animals" - YouTube
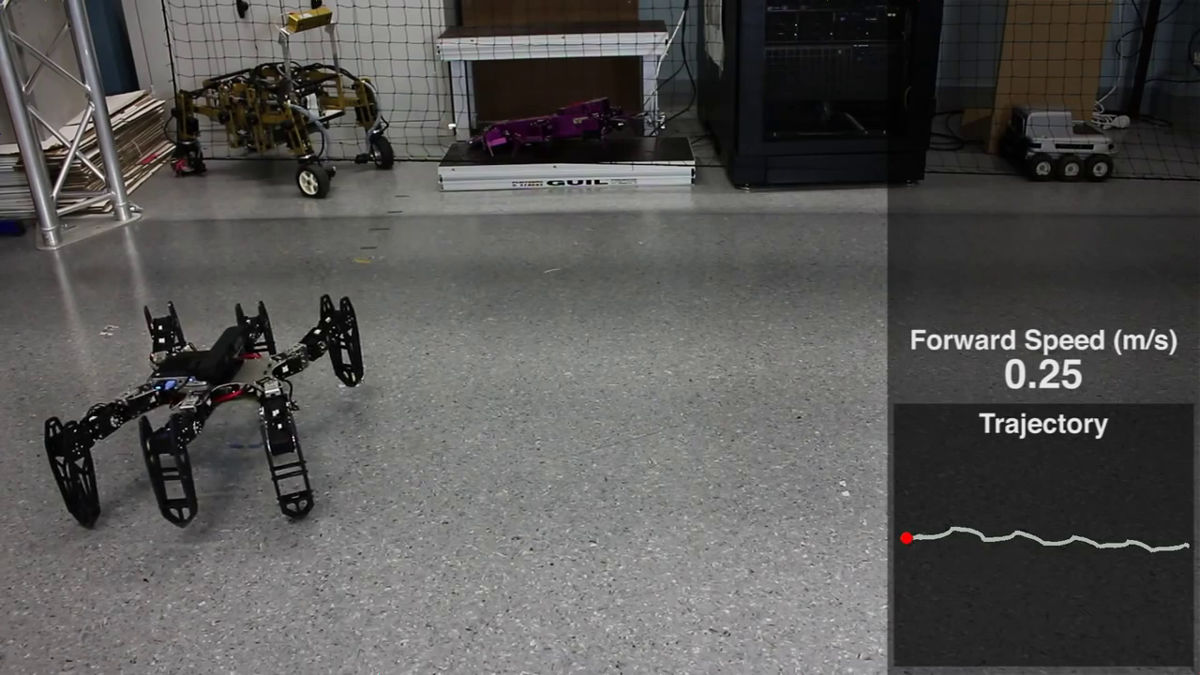
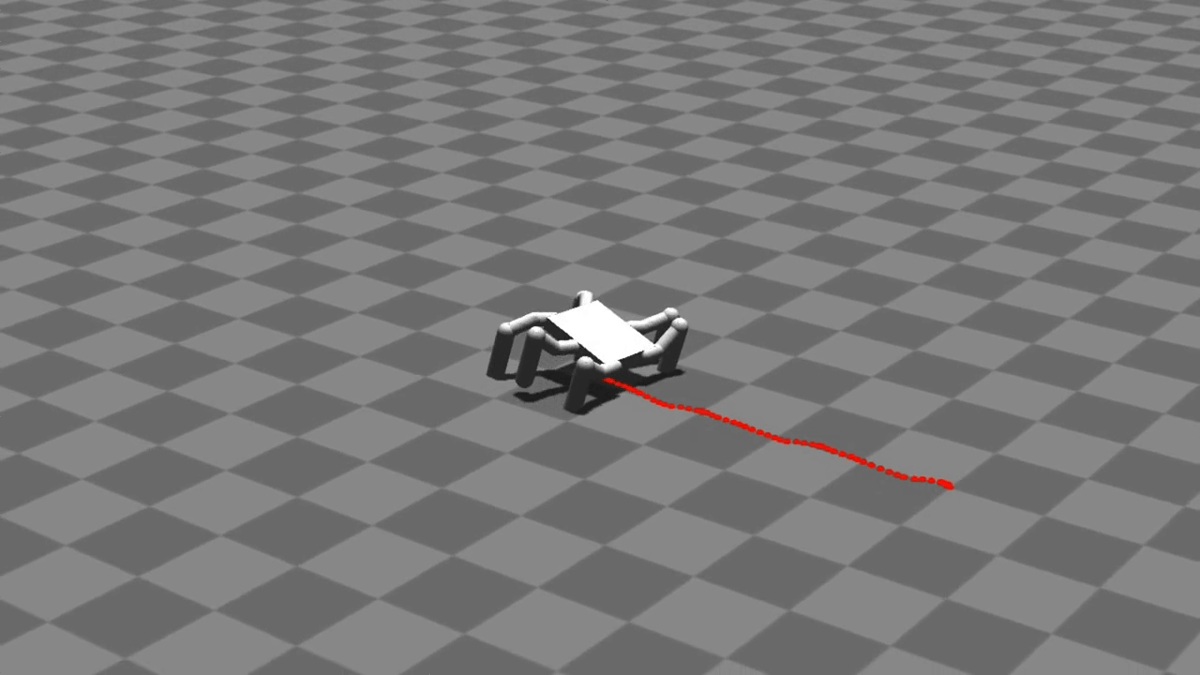
This is the experiment used for Hexapod.
You can walk straight if all the legs are normal.

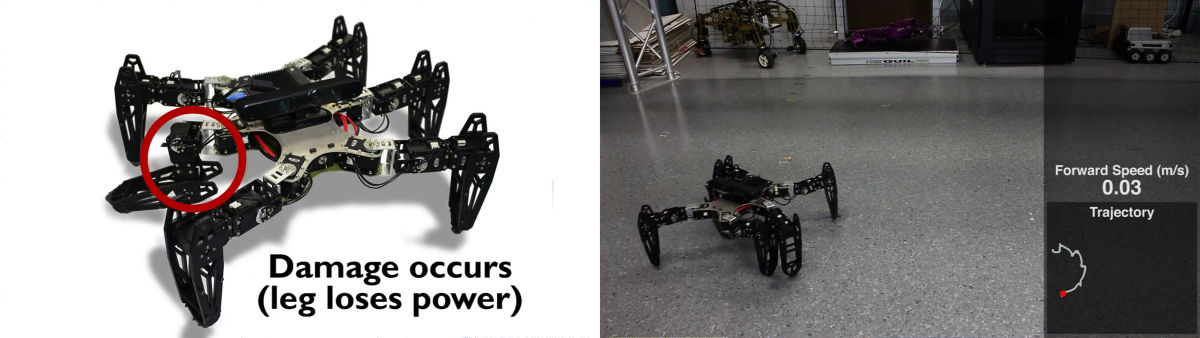
I tried walking with one leg slightly damaged, I turned around and turned 180 degrees.
So Hexapod tried several patterns that were input ......
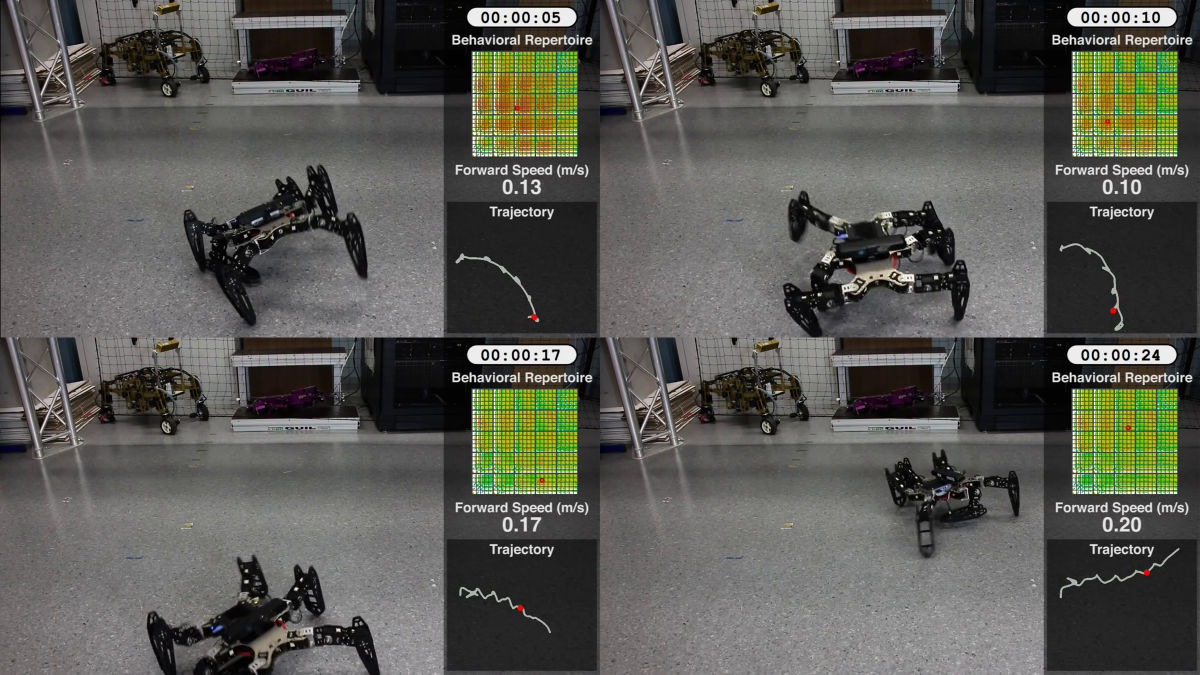
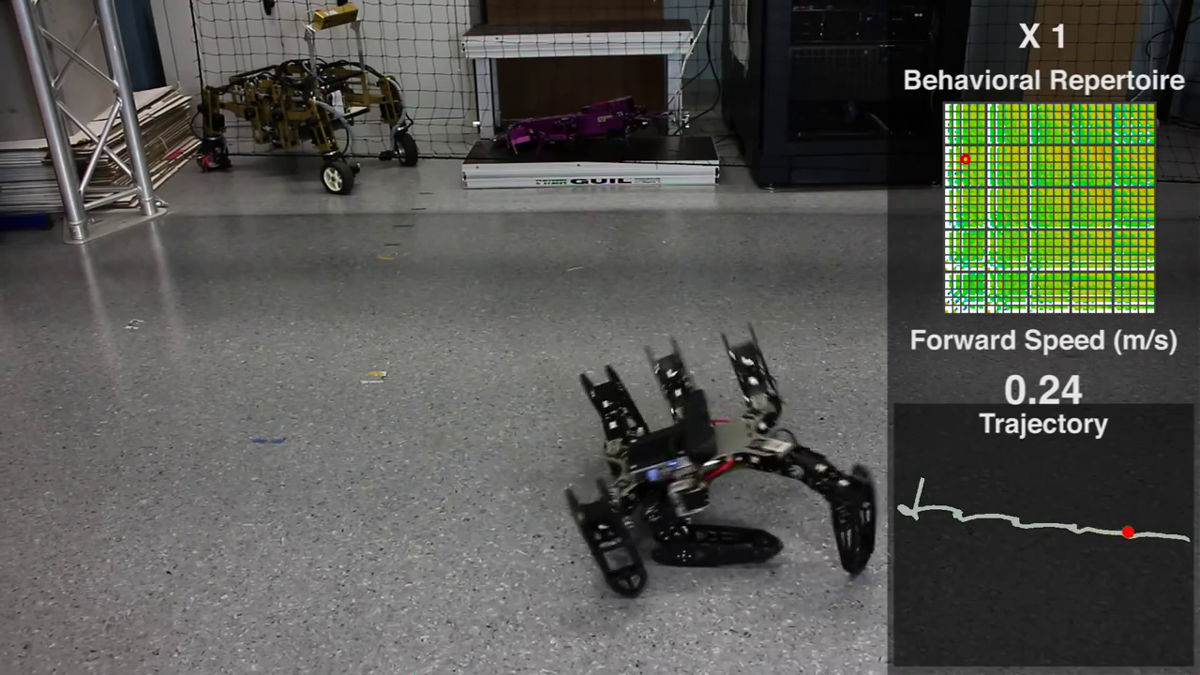
Although it is not perfectly straight after 24 seconds, I devised a pattern to walk with 5 legs.
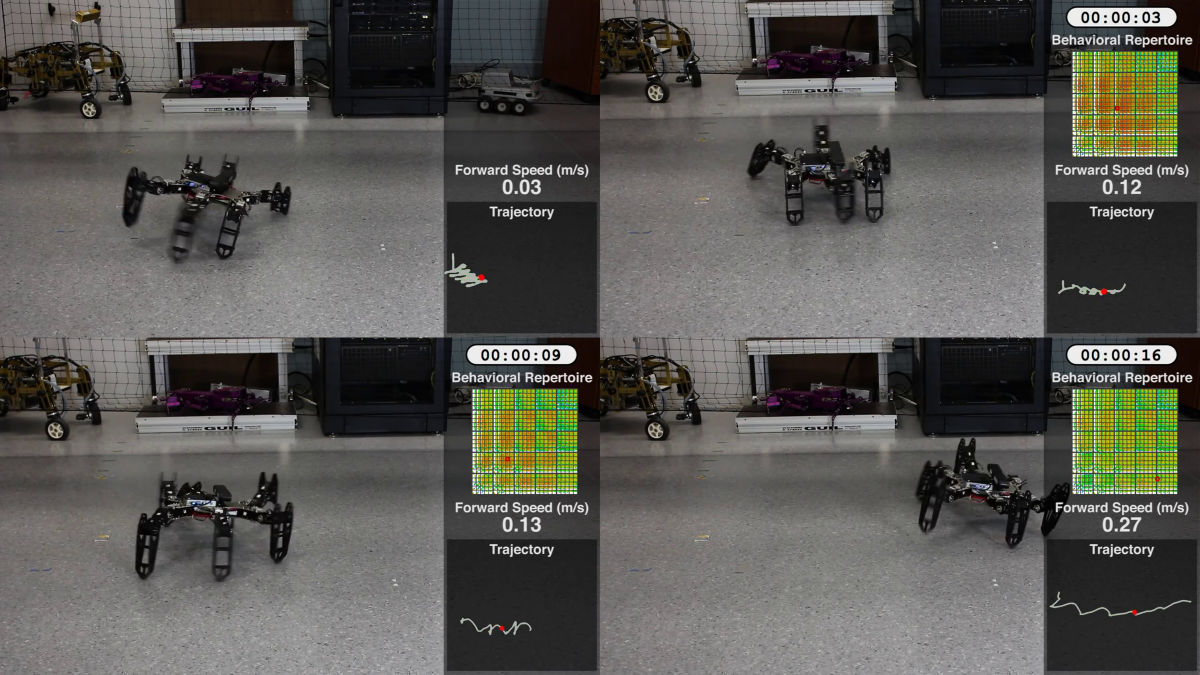
Even if another part is in a state where it is pockily broken ......
It became possible to go straight after 27 seconds.
In addition, simulation movies of these walking patterns can be seen from the following.
Supplementary video S2 for "Robots that can adapt like natural animals" - YouTube
First of all, all six legs are normal walk patterns.
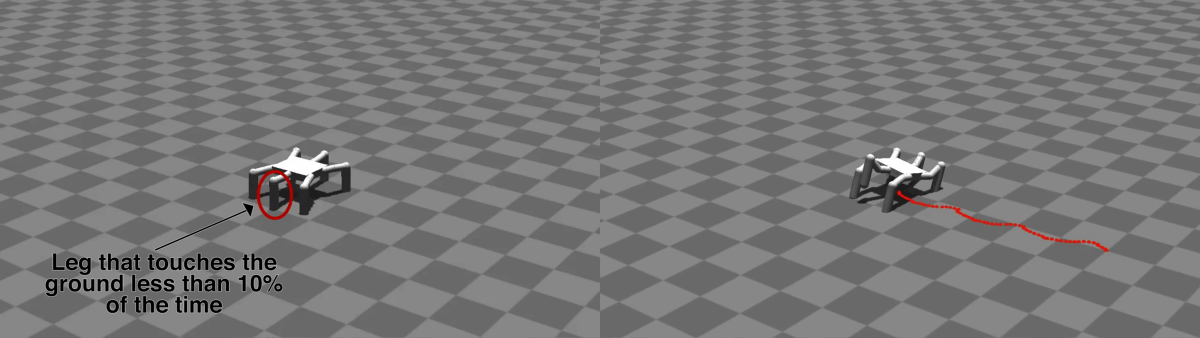
In the state where the output of one leg is reduced by 10%, while walking slightly zigzag as shown below, we are walking with the rest of the legs.
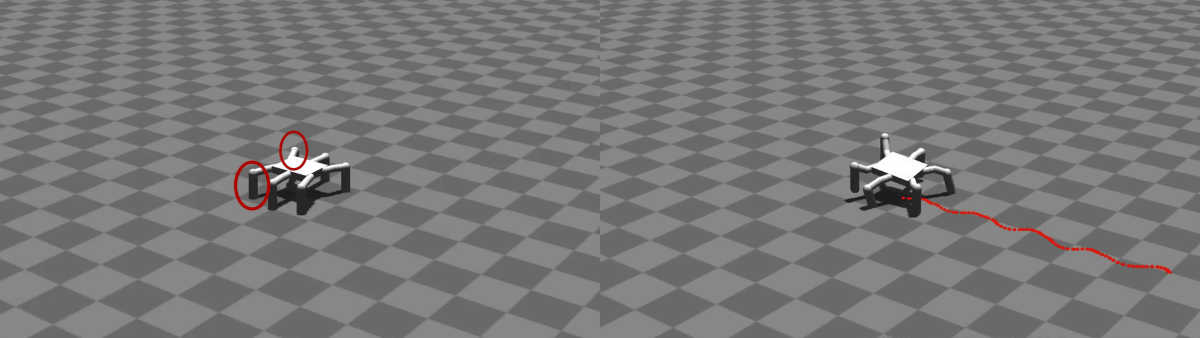
Patterns with two legs or more damaged are also recorded.
In the case where there is abnormality in all the legs ......
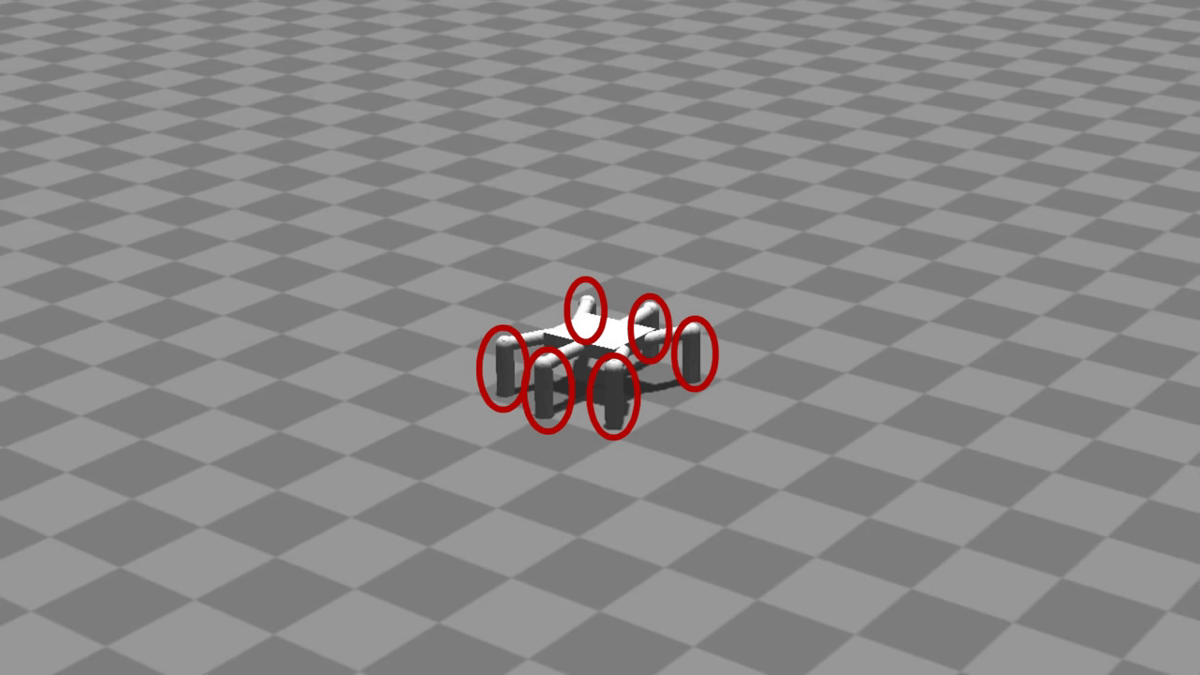
There was even a pattern that progressed using the part hitting "elbow" how it turned over. These algorithms apply the way that animals who lost their feet repeat intellectual trial and error.
Industrial robots and others are not big problems because they do not move from the place, but it seems to be a technology that plays an important role in the era when home robots are realized.
Related Posts: