







福島第一原子力発電所向けに東芝が四足歩行ロボットを開発
東芝が福島第一原子力発電所向けに、人が作業できない場所での調査や復旧作業を実施する四足歩行のロボットを開発しました。ロボットは無線操作で動き、歩行速度は時速1km。連続では2時間の駆動が可能だとのこと。
東芝:ニュースリリース (2012-11-21):福島第一原子力発電所向けの4足歩行ロボットの開発について
http://www.toshiba.co.jp/about/press/2012_11/pr_j2101.htm
2011年3月11日の東日本大震災とその直後に発生した津波のために東京電力福島第一原子力発電所は大きな被害を受けました。発電所の1号機から4号機については廃炉が決定していて、電気事業法的にも「廃止済み」の扱いですが、使用済み核燃料は今も残されたまま。周辺地域の線量も高いため、現場での活動には災害対応支援ロボットなどが投入されています。
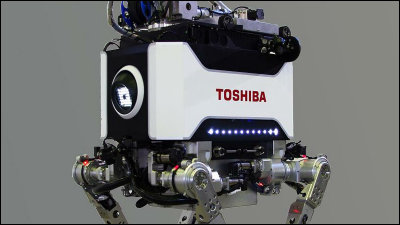
今回東芝が開発した無線操作の四足歩行ロボットがコレ。カメラや線量計を搭載しており、遠隔操作で原子力建屋内の状況把握が可能な作業ロボットです。東芝が独自開発した不整地や段差での歩行を制御するアルゴリズムと多関節構造によって、障害物を避けながらの歩行や階段の上り下りを実現しているので、車輪やクローラータイプのロボットでは到達できなかった場所での作業が可能となっています。
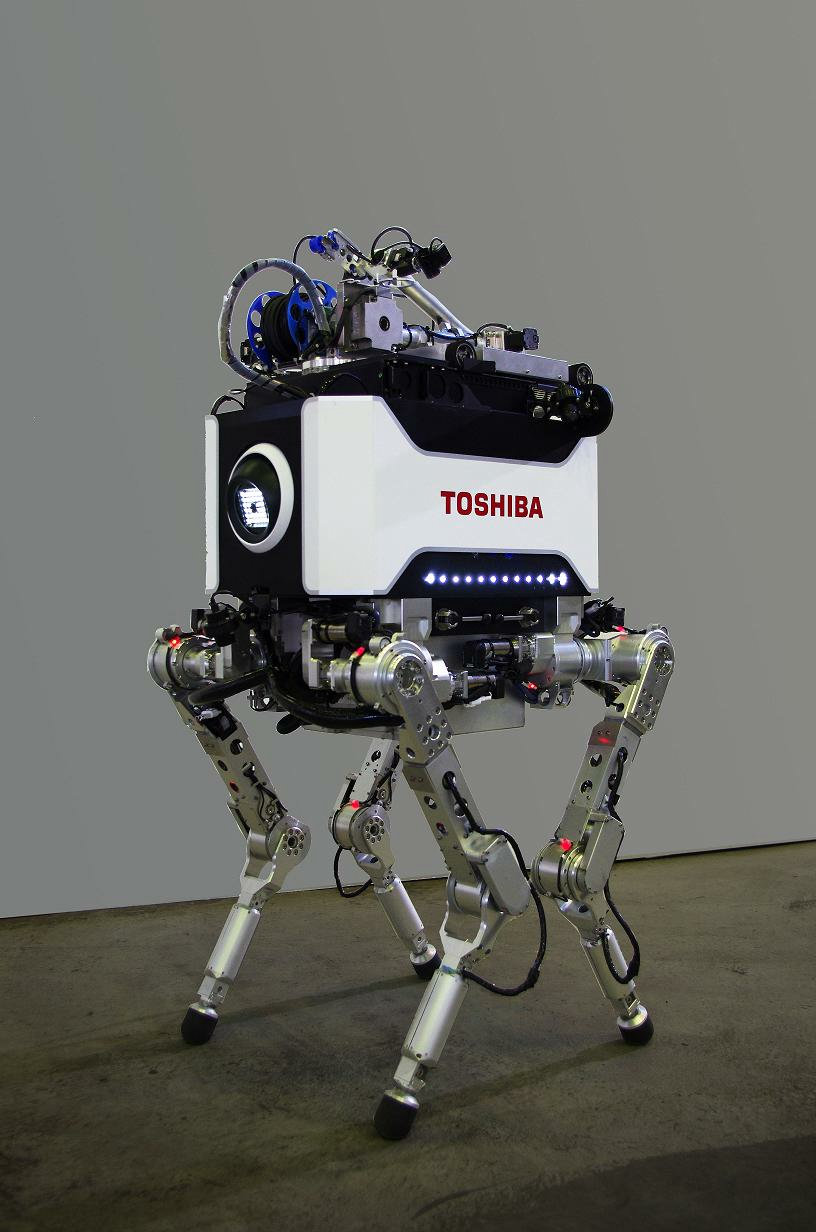
寸法は624mm×587mm×1066mm、重さは65kg。バッテリー搭載で、連続歩行時は2時間の駆動が可能。可搬重量は20kgで、歩行速度は時速1kmです。
ちなみに、この四足歩行ロボットと有線で接続する小型走行車がこちら。狭隘路の先や、構造物の陰にある設備・機器・配管の状態を撮影することができます。

こちらは313mm×327mm×47mmで重さが2kg。バッテリー搭載で1時間の駆動が可能。走行速度は時速0.2kmです。
・関連記事
福島第一原発の中は今どうなっているのかを撮影した高解像度写真やムービーを機密情報暴露サイトの老舗「Cryptome」がネットに公開 - GIGAZINE
福島第一原発に襲来した高さ10メートルの津波写真付き報告書まとめを東電が公開中 - GIGAZINE
東京電力が公開した事故発生から直近までの福島第一原発の詳細な写真いろいろ - GIGAZINE
海洋調査の歴史を塗り替えるかもしれないオープンソース探索ロボット「OpenROV」 - GIGAZINE
・関連コンテンツ







