歴代機体や日本未発売機体まで登場、「ルンバ 700シリーズ」フォト&ムービーレビュー

本日発表されたロボット掃除機「ルンバ」の新商品「700シリーズ」が発表会場に展示されたので、オモテウラとじっくり観察してきました。

これはハイグレードモデルの780。色はシルバーです。

3モデルとも共通の要素は「高速応答プロセス『iAdapt』」「NEW3段階クリーニングシステム」「自動充電機能」「リモナビ(リモコン)」「スケジュール機能」「バーチャルウォール機能」の6つで、780はそれに加えて「ダブルゴミセンサー」「ゴミフルサイン」「お部屋ナビ」「タッチパネル」を搭載。

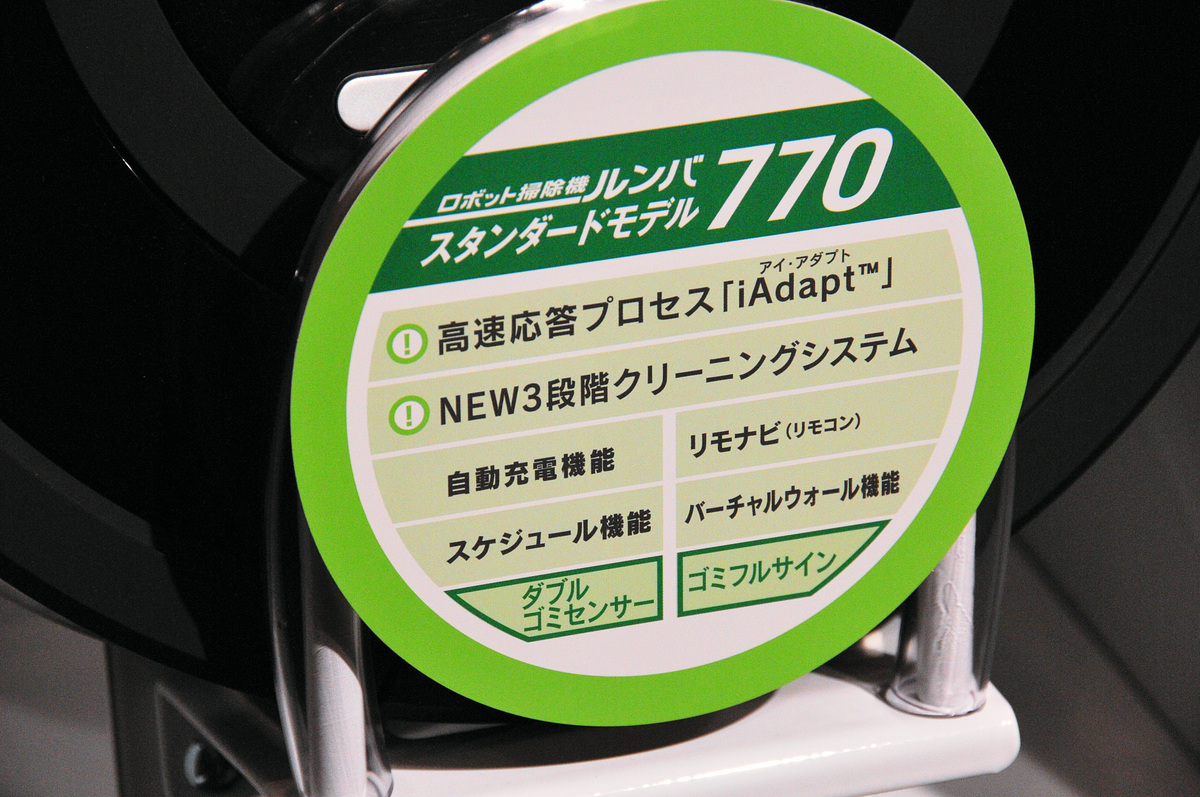
スタンダードモデルの770。色はブラックです。

基本6機能に加えて「ダブルゴミセンサー」「ゴミフルサイン」を搭載。
ベーシックモデルの760、色はホワイト。

基本6機能を搭載。

ドックで出撃待機中の780。

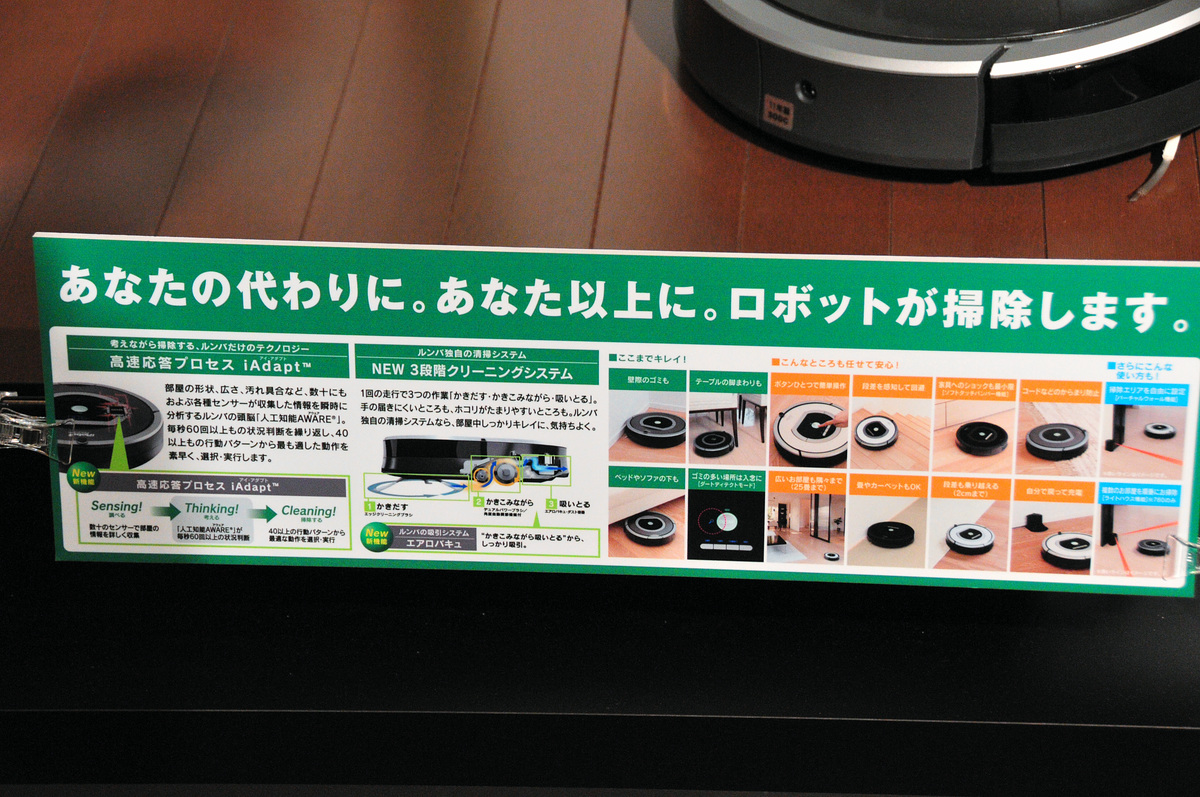
「あなたの代わりに。あなた以上に。ロボットが掃除します。」というキャッチコピーは本当に胸がくすぐられます。
実際に動作している様子はこんな感じ。
ロボット掃除機「ルンバ」最新機種「700シリーズ」の動作
770を持ってみました。基本的にあまりこのように持ち歩くことはないと思いますが、複数階掃除する場合などは持ち歩くこともあるかも。

これが裏側。
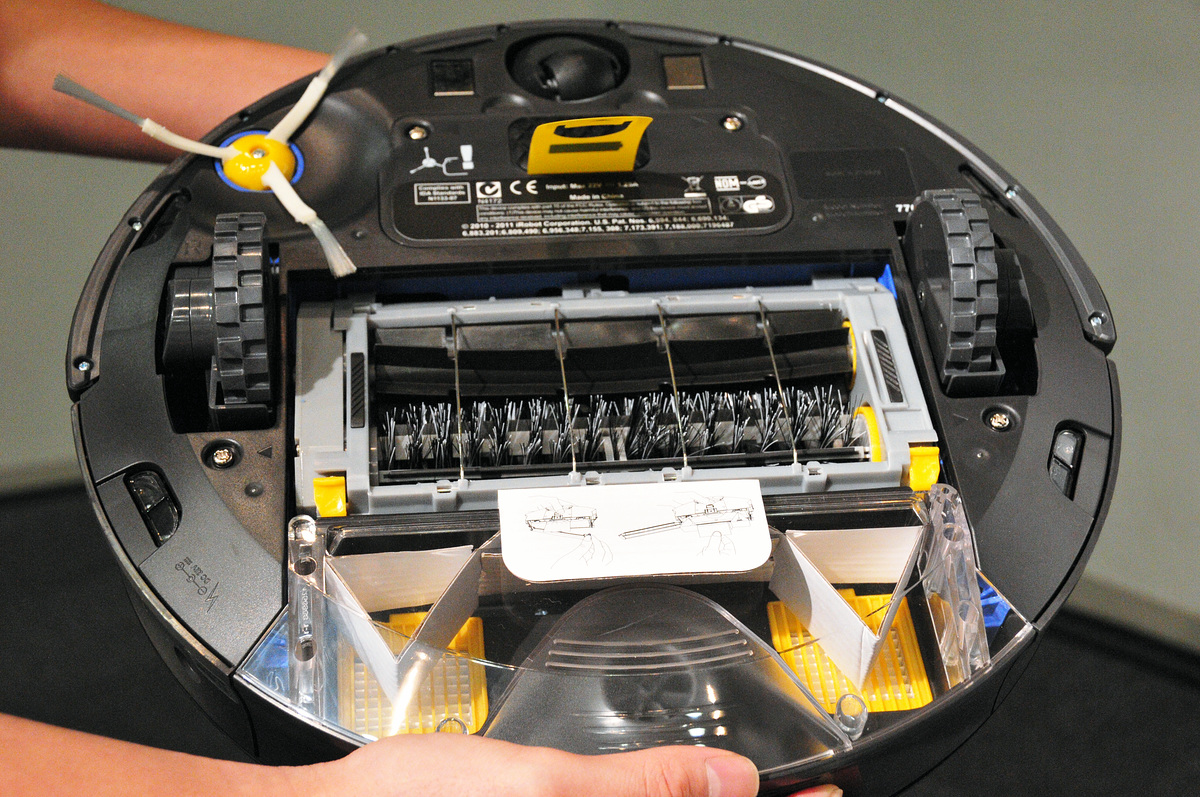
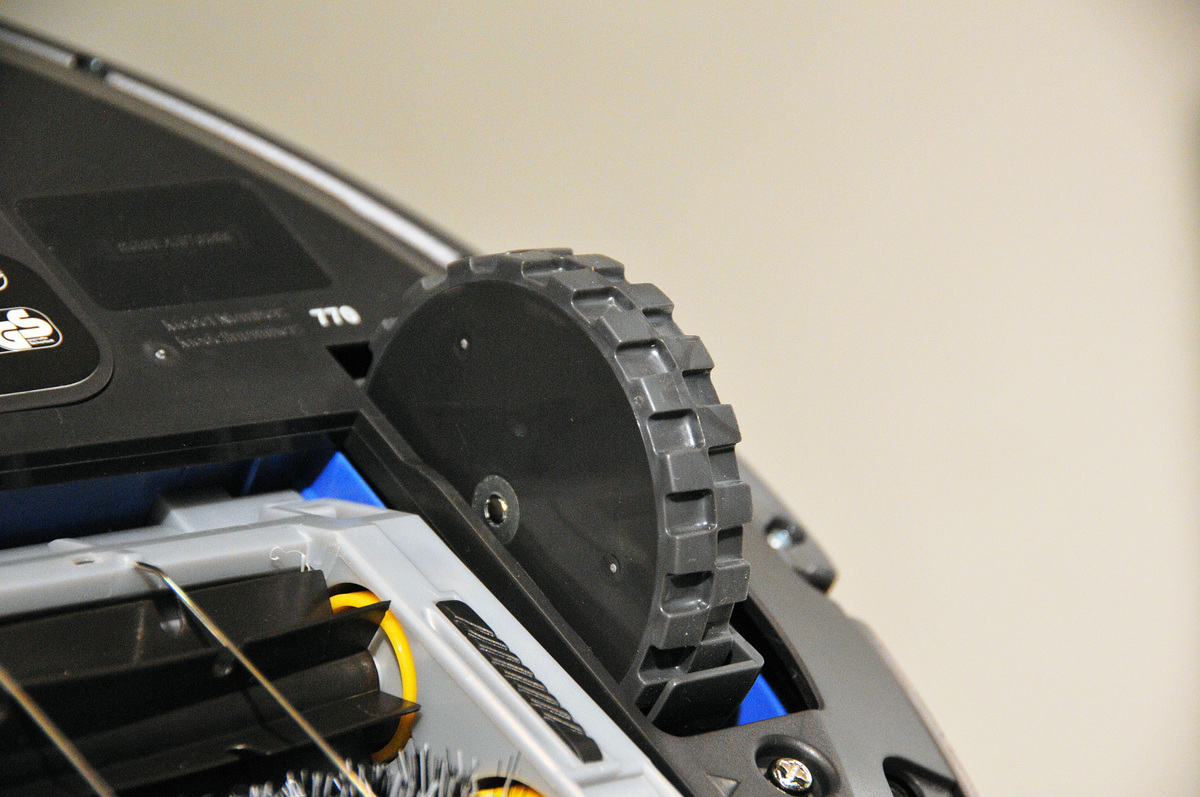
大きな段差でも超えられそうなタイヤ。実際は本体に埋まるような形になるため、越えられる段差はだいたい2cmぐらいまで。
壁際や隅っこのゴミでもうまく吐き出すエッジクリーニングブラシ。

今までのモデルよりも少し容量が増えたダストボックス。
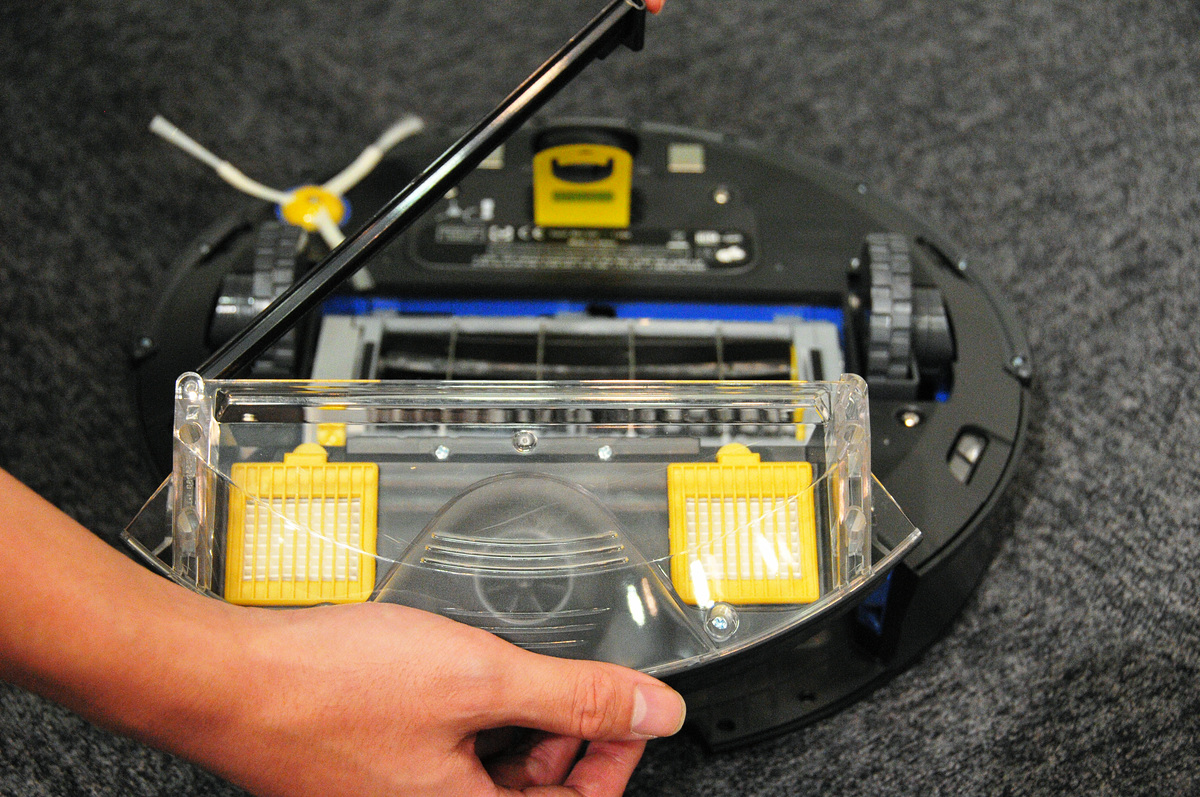
そして排気をクリーンにしてくれるフィルター。

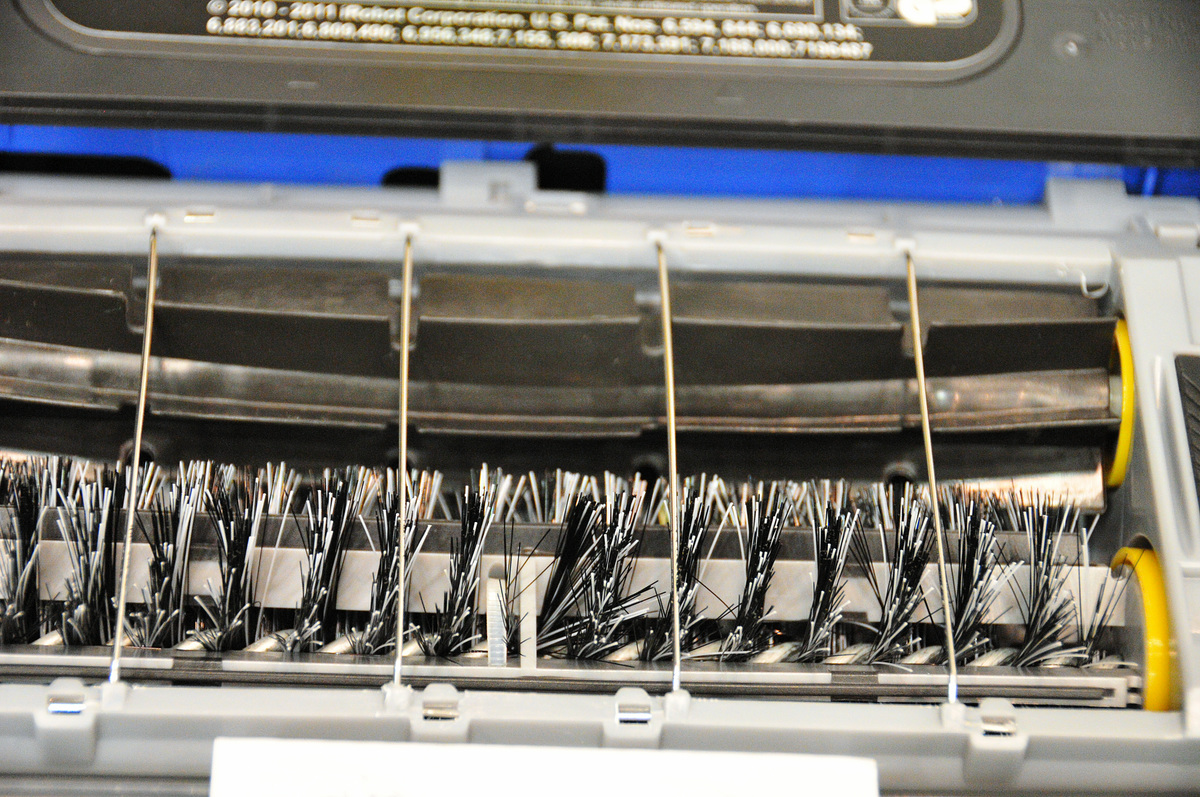
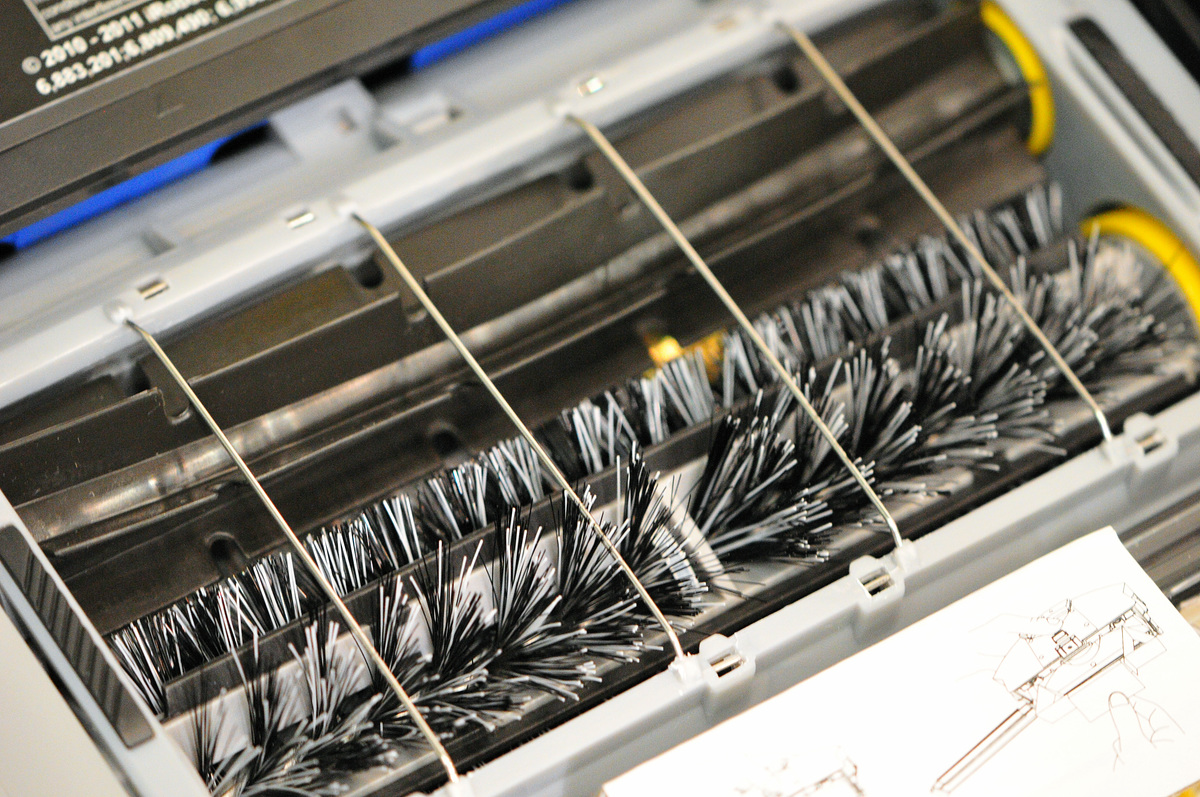
ゴミを掻き出しつつ吸い込むという、700シリーズの大きな改善点。
こちらは780のタッチパネル。他モデルだとボタンになっている部分です。
これがリモナビ(リモコン)。500シリーズだとお椀のような形のリモコンだった気がしますが、エアコンやテレビのリモコンのような形に。

780に付属するお部屋ナビ。連続した複数の部屋を順番に掃除できるように設定可能。また、バーチャルウォールとしても使用可能です。

こちらがバーチャルウォール(760、770に付属)。これを2つ置くと、その間に見えない壁(バーチャルウォール)が設定され「ここからは入ってこないように」というような区切り方ができます。

お手入れリングとセンサー。

そして会場の一角には歴代ルンバが展示されていました。これは2002年の初代ルンバ。

部屋の大きさを選んでスタートする仕組みでした。

2003年のルンバプロエリート。


2004年、ルンバディスカバリー。部屋のサイズを設定するという必要がなくなったようです。


2005年、ルンバスケジューラー。この機体からスケジュール機能が搭載されました。


2007年のルンバ577。ここでついに全自動掃除が実現。


日本では発売予定のない、プール洗浄ロボット「Verro(ベロ)」。
自動でプールの壁面や水面を移動しながら水を吸い込み、水中のゴミなどを濾過して除去してくれるロボット。ブラシが内蔵されているので、床を磨きながら掃除もしてくれます。



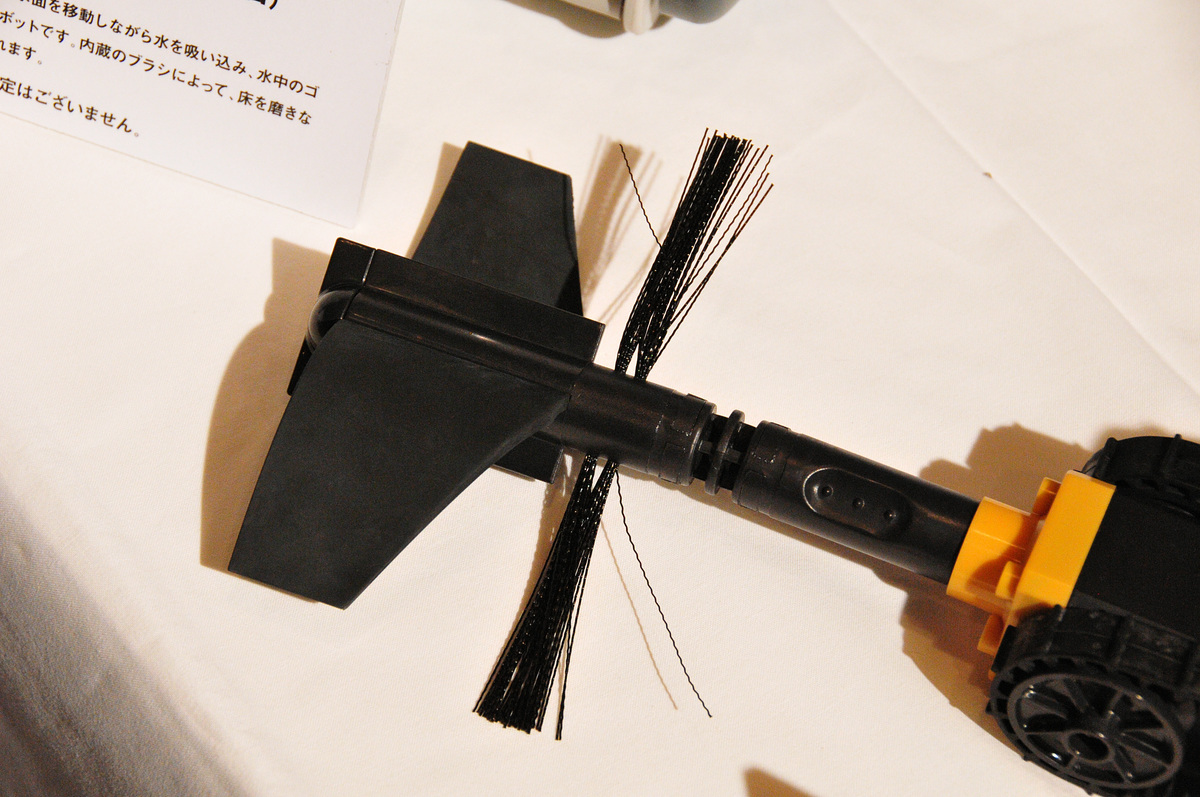
こちらも日本では発売予定無しの、雨どい掃除ロボット「Looj(ルージ)」。
雨どいを安全かつ簡単に掃除してくれるロボット。溝に置いてスイッチを押すだけで、葉っぱやほこり、泥を掻き出してくれます。



ルンバはゴミを集めて吸い込む掃除機ですが、そのあとの水拭きまでやってくれるロボットが「Scooba(スクーバ)」。

ゴミを吸い取るほか、専用クリーニング溶液などを用いたモップがけと、床面乾燥を同時に行えます。

小さな機体と大きな機体がありますが、これは床面積の広さに応じた物だそうです。


なお、アメリカの広いバスルームのようなものを想定しているためか、日本での販売予定はないとのこと。
・関連記事
ロボット掃除機「ルンバ」に日本の住環境に適応した新シリーズ、10月から発売 - GIGAZINE
2012年度は25万台販売が目標、ロボット掃除機「ルンバ」のマーケティング戦略 - GIGAZINE
自動掃除機ルンバの実力を検証する~ハイエンドモデル「ルンバ570」を使い倒す~ - GIGAZINE
自動掃除機ルンバの実力を検証する~オフィスと家庭で実際に使ってみた~ - GIGAZINE
全自動掃除機「ルンバ」を華麗に乗りこなすネコライダー - GIGAZINE
ダイソンが新たな掃除機を発表、カーボンファイバーを使用した静電気を起こさないヘッドを開発 - GIGAZINE
ラジコンカーを改造して掃除機として使ってみる - GIGAZINE
・関連コンテンツ